- Escáner 3D
-
Escáner 3D
Un escáner 3D es un artefacto que analiza un objeto o el ambiente físicos para reunir los datos en su forma y posiblemente color. Los datos completos entonces se pueden usar para construir modelos digitales tri-dimensionales que se usan en una amplia variedad de aplicaciones. Estos artefactos son usados extensamente por la industria en la producción de películas y videojuegos. Otras aplicaciones incluyen el diseño y prototipos industriales, análisis por estructural por computadora y la documentación de artefactos culturales.
Contenido
Funcionalidad
El propósito de un escáner 3D es, generalmente, el de crear una nube de puntos a partir de muestras geométricas en la superficie del objeto. Estos puntos se pueden usar entonces para extrapolar la forma del objeto (un proceso llamó la re-edificación o re- construcción). Si la información de color se reúne en cada uno de los puntos, entonces los colores en la superficie del objeto se pueden determinar también.
Los escáneres 3D son muy análogos a las cámaras. Al igual que estas, tienen un campo de visión en forma de cono, y sólo pueden reunir información acerca de superficies iluminadas. Mientras una cámara reúne información de color acerca de las superficies dentro de su campo de visión, los escáneres 3D reunen información acerca de superficies. El retrato producido por un escáner 3D describe la distancia a una superficie en cada uno de los puntos en el retrato.
Si se define un sistema esférico de coordenadas en el cual se define que el escáner es el origen y el vector fuera de la frente del escáner son φ= 0 y θ=0, entonces cada punto en el retrato se asocia con un φ y θ Junto con una distancia, que corresponde al componente r, estos coordenadas esféricas an describen completamente la posición tridimensional de cada punto en el retrato, en un sistema de coordenadas local el cual es relativo al escáner.
Para la mayoría de las situaciones, un solo escáneo no producirá un modelo completo del objeto. Generalmente se requieren múltiples escaneos, incluso centenares, desde muchas direcciones diferentes para obtener información de todos los lados del objeto. Estos escaneos tienen que ser introducidos a un sistema común de referencia, un proceso que se llama generalmente alineación, y entonces son unidos para crear un modelo completo. Este proceso entero, yendo del mapeo de la distancia al modelo entero, se conoce generalmente como el escáneo 3D pipeline.[1]
Tecnología
Los dos tipos de escáneres 3D son el de contacto y sin contacto. Los escáneres de contacto 3D se pueden dividir además en dos categorías principales, escáneres activos y escáneres pasivos. Hay una variedad de tecnologías que caen bajo cada una de estas categorías.
Contacto
Los escáneres 3D examinan el objeto por medio del toque físico. Un CMM (Maquina de medición por coordenadas) es un ejemplo de un escáner del contacto 3D. Se usa en su mayoría en la fabricación y puede ser muy preciso. La desventaja de los CMMs, es que requiere el contacto con el objeto para se escanear. Así, el acto de escanear el objeto quizás lo modifique o lo quizás lo dañe por este contacto que se realiza. Este hecho es muy significativo cuándo se escanean objetos delicados o valiosos artefactos tales como los artefactos históricos. La otra desventaja de CMMs es que son relativamente lentos comparado con los otros métodos que se pueden utilizar para escanear. El movimiento físico del brazo donde se monta el escáner puede ser muy lento y el CMMs más rápido puede sólo operar en unos pocos cientos de hertz. Por contraste, un sistema óptico semejante al de un sistema de escáner de láser puede operar de 10 a de 500 khz.
Otros ejemplos son los escáners que se usan para digitalizar los modelos (objetos y personas) en la industria de la animación de la computadora.
Activos
Escáneres activos emiten alguna clase de la radiación y disciernen su reflejo para tentar un objeto o el ambiente. Los tipos posibles de la radiación usada incluyen la luz, ultrasonido o radiografía.
El escáner del láser del tiempo del vuelo 3D es un escáner activo que usa la luz del láser para examinar el objeto. En el corazón de este tipo de escáner existe un examinador de distancias del láser de tiempo de vuelo. El examinador de la distancia del láser encuentra la distancia de una superficie cronometrando el tiempo del viaje redondo de un pulso de la luz. Un laser se usa para emitir un pulso de la luz y la cantidad de tiempo antes la luz reflejada es vista por un detector es cronometrado. Como la velocidad de la luz C es conocida, el tiempo del viaje redondo determina la distancia del viaje de la luz, que es dos veces la distancia entre el escáner y la superficie. Si T es el tiempo del viaje redondo, entonces distancia es igual a (C * T) /2. Claramente la certeza de un escáner del laser de tiempo de vuelo 3D depende de la precisión con la que se puede medir el tiempo T: 3.3 pico segundos (aprox.) es el tiempo requerido para que la luz viaje 1 milímetro.
Time of Flight (Tiempo de Vuelo)
 Este escáner Laser puede ser usado para escanear edificios, formaciones rocosas, etc., y producir un modelo 3D. El LASER apunta su rayo en un amplio rango horizontal. Su cabeza rota horizontalmente, un espejo se mueve verticalmente hacia arriba y hacia abajo. El rayo LASER es usado para medir la distancia al primer objeto que encuentre en su trayectoria.
Este escáner Laser puede ser usado para escanear edificios, formaciones rocosas, etc., y producir un modelo 3D. El LASER apunta su rayo en un amplio rango horizontal. Su cabeza rota horizontalmente, un espejo se mueve verticalmente hacia arriba y hacia abajo. El rayo LASER es usado para medir la distancia al primer objeto que encuentre en su trayectoria.
Trimble Laser Scan GX Acceso a la web del fabricante
El examinador de la distancia del láser sólo discierne la distancia de un punto en su dirección del panorama. Así, el escáner escanea su campo entero del panorama un punto a la vez cambiando al la dirección del examinador de distancia para escanear puntos diferentes. La dirección del panorama del examinador de la distancia del láser puede ser cambiada al girar al examinador de la distancia mismo, o usando un sistema de giratorio de espejos. El método de espejos giratorios se usa comúnmente porque estos son mucho más ligeros y así pueden ser girados mucho más rápido y con una precisión más grande. Escáneres típicos de láser de tiempo de vuelo 3D pueden medir la distancia en puntos de 10,000 ~ 100,000 cada segundo.Triangulación
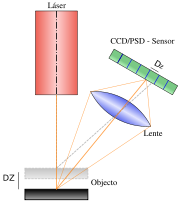 Principio de un sensor LASER de triangulación. Se muestra la posición de dos objetos.
Principio de un sensor LASER de triangulación. Se muestra la posición de dos objetos.El escáner del láser de triangulación 3D es también un escáner activo que usa la luz del láser de examinar el ambiente. Con el respeto para cronometrar de escáner de láser de vuelo 3D el láser de triangulación brilla un láser en el objeto y explota una cámara para buscar la ubicación del punto del láser. Dependiendo de que tan lejos el láser golpee una superficie, el punto del láser aparece en lugares diferentes en el panorama de la cámara. Esta técnica se llama triangulación porque el punto de láser, la cámara y el emisor del láser forman un triángulo. La longitud de un lado del triángulo, la distancia entre la cámara y el emisor del láser se sabe. El ángulo del rincón de emisor de láser se sabe también. El ángulo del rincón de cámara puede ser determinado mirando la ubicación del punto del láser en la cámara. Estos tres pedazos de información determinan completamente la forma y el tamaño del triángulo y dan la ubicación del rincón punteado del triángulo. En la mayoría de los casos una raya de láser, en vez de un solo punto del láser, se barre a través del objeto para acelerar el proceso de la adquisición. El Concilio Nacional de Investigación de Canadá estaba entre los primeros institutos en desarrollar la tecnología basada de examinación por triangulación en 1978.[2]
La Holografía Conoscópica
Es una técnica interferométrica que consiste en hacer pasar un rayo reflejado en una superficie a través de un cristal birrefringente, esto es un cristal con dos índices de refracción, uno fijo y otro dependiente del ángulo de incidencia, el resultado son dos rayos paralelos que se hacen interferir con una lente cilíndrica, esta interferencia es capturada por un sensor CCD, la frecuencia de esta interferencia determina la posición del objeto en el que se proyectó el rayo láser. Esta técnica permite la medición de orificios en su configuración colineal, alcanzando precisiones mejores que una micra. La ventaja de esta técnica es que puede utilizar luz no coherente, esto quiere decir que la fuente de iluminación no tiene porqué ser un láser, la única condición es que sea monocromática.
La luz estructurada
Los Escáneres 3D de luz estructurada proyectan un modelo de la luz en el objeto y miran la deformación del modelo en el sujeto. El modelo puede ser unidimensional o de dos dimensiones. Un ejemplo de un un modelo dimensional es una línea. La línea se proyecta en el objeto que se usa o un proyector de LCD o un láser general. Una cámara, la desviación levemente del proyector de modelo, mira la forma de la línea y usa una técnica semejante al triangulación para calcular la distancia de cada punto en la línea. En el caso de un del modelo de la línea sola, la línea se barre a través del campo del panorama para reunir información de distancia una tira a la vez.
Un ejemplo de un modelo bidimensional es una cuadrícula o un modelo de raya de línea. Una cámara se usa para mirar la deformación del modelo y un algoritmo bastante complejo se usa para calcular la distancia en cada punto en el modelo. Una razón para la complejidad es la ambigüedad. Considere una serie de rayas verticales paralelas de láser que barren horizontalmente a través de un blanco. En el caso más sencillo, uno podría analizar una imagen y asumir que la secuencia izquierda-derecha de rayas refleja la sucesión de los laseres en la serie, así de esta manera la raya de extremo izquierdo de la imagen sea el primer láser, el próximo es el segundo láser, etcétera. En objetivos no triviales que contienen cambio de patrón hoyos, oclusiones, y de la profundidad, sin embargo, esta secuencia se descompone como rayas a menudo se esconden y pueden aparece aún el orden de cambio, tener como resultado la ambigüedad de raya de láser. Este problema particular fue resuelto recientemente por una tecnología de la ruptura llamó Multistripe Triangulation (MLT) del Láser. El escaneo estructurado de luz es todavía es un área muy activa de investigación con muchas investigaciones publicadas cada año.
La ventaja de los escáneres 3D de luz estructurada es la velocidad. En vez de escanear un punto a la vez, escanean múltiples puntos o el campo entero del panorama inmediatamente. Esto reduce o elimina el problema de la deformación del movimiento. Algunos sistemas existentes son capaces de escanear objetos en movimiento en tiempo real.[3]
La luz modulada
Escáneres 3D ligeros modulados brillan una luz continuamente cambiante en el objeto. Generalmente la fuente de luz simplemente cicla su amplitud en un patrón de sinodal. Una cámara detecta la luz reflejada y la cantidad que el patrón de la luz cambia para determinar la distancia viajada por la luz.
Pasivos
Escáneres pasivos no emiten ninguna clase de la radiación por sí mismos, pero en lugar se fía de detectar la radiación reflejada del ambiente. La mayoría de los escáneres de este tipo detectan la luz visible porque es una radiación ya disponible del ambiente. Otros tipos de la radiación, tal como el infrarrojo podrían ser utilizado también. Los métodos pasivos pueden ser muy baratos, porque en la mayoría de los casos estos no necesitan hardware particular.
Estereoscopios
Los sistemas Estereoscopios emplean generalmente dos cámaras de video, levemente aparte, mirando la misma escena. Analizando las diferencias leves entre las imágenes vistas por cada cámara, es posible determinar la distancia en cada punto en las imágenes. Este método se basa en la visión humana de estereoscopio.
Silueta
Estos tipos de escáneres 3D usan bosquejos creados de una sucesión de fotografías alrededor de un objeto tridimensional contra un fondo muy bien contrastado. Estas siluetas se estiran y son cruzadas para formar la aproximación visual de casco del objeto. Con esta clase de técnicas alguna clase de concavidades de un objeto (como el interior de un tazón) no son detectadas.
Con Ayuda del Usuario (Modelado Basado en Imagen)
Hay otros métodos que, basados en la ayudada del usuario para el descubrimiento e identificación de algunas características y formas en un conjunto de retratos diferentes de un objeto son capaces de construir una aproximación del objeto mismo. Esta clase de técnicas son útiles para construir la aproximación rápida de edificios a semejanza de objetos, formados y sencillos. Varios paquetes comerciales están disponibles como iModeller, el Escultor D o RealViz ImageModeler.
Este tipo de escaneo 3D se basa en los principios de fotogrametría. Es también algo semejante en la metodología a la fotografía panorámica, excepto que las fotos se toman de un objeto en un espacio tridimensional para replicarlo en vez de tomar una serie de fotos de un punto en un espacio tridimensional para replicar el ambiente circundante.
Reedificación o Reconstrucción
El punto de la nube producido por escáneres 3D generalmente no es usado directamente. La mayoría de las aplicaciones no usan nubes de punto, pero en lugar usan modelos poligonales 3D. El proceso de convertir una nube del punto en un modelo de poligonal 3D se llama la reedificación o reconstrucción. La reedificación implica encontrar y conectar los puntos adyacentes para crear una superficie continua. Muchos algoritmos están disponibles para este propósito.
Aplicaciones
Procesamiento de la Materia y la producción
Escaneo de láser describe un método donde una superficie se prueba o es escudriñado usando la tecnología del láser. Varias áreas de la aplicación existen eso difiere principalmente en el poder de los laseres que se usan, y en los resultados del proceso que escanea. Los laseres con el poder bajo se usan cuando la superficie escaneada no influye, por ejemplo cuando se tiene que digitalizar. Escaneo de Confocal o 3D láser son los métodos para obtener información acerca de la superficie escaneada.
Dependiendo del poder del láser, su influencia en un pedazo de trabajo difiere: los valores más bajos del poder se usan para el grabado del láser, donde materia es quitada parcialmente por el láser. Con los poderes más altos que la materia llega a ser líquida y laser se puede utilizar para soldar, o si el poder alto deberá quitar bastante la materia completamente, entonces el corte con láser puede ser realizado.
También para prototipo rápido un procedimiento de escaneo de láser se usa. por ejemplo un prototipo es generado por sintetizar una resina por medio del de láser.
El principio que se usa para todo estas aplicaciones son el mismo: software que corre en una PC o un sistema empotrado y eso controlan el proceso completo se conecta con una tarjeta de escáner. Esa tarjeta convierte los datos recibidos de vector a la información del movimiento que es mandada al la cabeza del escáner. Este cabezal se compone de dos espejos que son capaces de desviar el rayo del láser en un nivel (coordenadas X y Y ). La tercera dimensión es - si necesario - lograda por un dispositivo óptico que es capaz de mover el punto focal del láser en la dirección de la profundidad (eje Z).
La tercera dimensión se necesita para algunas aplicaciones especiales come el prototipo rápido donde un objeto es construido capa por capa o para en marcar de vidrio donde el láser tiene que influir en la materia en posiciones específicas dentro el. Para estos casos es importante que el láser tenga un punto focal lo más pequeño posible.
Para aplicaciones más complejas de escaneo de láser y/o rendimiento material alto durante la producción, sistemas que de escaneo con más que un cabezal es utilizado. Aquí el software tiene que controlar lo que se hace exactamente dentro de TAL aplicación de multicabezal: es posible que todas cabezas disponibles tienen que marcar el mismo punto para acabar de procesamiento más rápido o que las cabezas marcan un solo trabajo de forma paralela donde cada cabezal realiza una parte del trabajo en caso de áreas de trabajo grandes.
Entretenimiento
Escáneres 3D son usados por la industria de entretenimiento para crear los modelos 3D digitales para ambas películas y juegos de videos. En caso de que donde un equivalente de mundo verdadero de un modelo exista, es mucho más rápido escanear el objeto físico que crear manualmente al el 3D del modelo por medio de software de modelación. Frecuentemente, los artistas esculpen los modelos físicos de lo que ellos quieren y los escanean en forma digital antes de pasarlos directamente a modelos digitales en una computadora.
La ingeniería Inversa
La ingeniería inversa de un componente mecánico requiere un modelo digital preciso de los objetos a ser reproducido. Antes que un conjunto de los puntos que un modelo digital preciso es representado típicamente por un conjunto de superficies tal como un conjunto de superficies triangulares planas, un conjunto de la planicie o superficies curvas de NURBS, o idealmente para componentes mecánicos un sólido de CAD que se compone de un subconjunto de CAD de superficies de NURBS. Un escáner 3D se puede usar para digitalizar forma libre o componentes formados gradualmente cambiantes de geometrías así como también prismáticas mientras que una CMM es usada generalmente sólo para que determine las dimensiones sencillas de un modelo sumamente prismático. Estos puntos de datos entonces se procesan para crear un usable modelo digital.
La Herencia Cultural
Ha habido muchos proyectos de investigación emprendieron el escanear sitios y artefactos históricos.
Miguel Ángel
En 1999, dos grupos diferentes de investigación comenzaron a escanear estatuas de Miguel Ángel. La universidad de Stanford con un grupo dirigido por Levoy de Marc usó un escáner de triangulación de láser comercial y construido por Cyberware para escudriñar las estatuas de Miguel Ángel en Florencia, notablemente el David, el Prigioni y las cuatro estatuas en la Capilla de Medici. El escaneo produjo una densidad del punto de datos de una muestra por 0.25mm, detallado bastante para ver las marcas de cincel de Miguel Ángel. Este detallado escaneo produjo una cantidad inmensa de datos (hasta 32 gigabits) y procesamiento de los datos de su escaneo llevó 5 meses. Aproximadamente en el mismo período un grupo de investigación de IBM, dirigido por H. Rushmeier y F. Bernardini escaneo el Pietà de Florencia adquiriendo detalles geométrico y de color.[4]
Monticello
En 2002, David Luebke, al de et. escaneo Monticello.[5] Un tipo comercial de escáner de laser de tiempo vuelo, el DeltaSphere 3000, fueron usados. Los datos de escáner se combinaron luego con datos de color de fotografías digitales para crear el Monticello Virtual, y las exhibiciones en el Museo Nuevo de Orleans del Arte en 2003. La exhibición Virtual de Monticello simuló una ventana que mira en la Biblioteca de Jefferson. La exhibición se compuso de un despliegue de la proyección en una pared y un par de lentes estéreos para el espectador. Los lentes, combinado con proyectores polarizados, proporcionaron un efecto 3D. La posición rastreando hardware en los lentes permitió que el despliegue adaptara como el espectador circula, creando la ilusión que el despliegue es verdaderamente un hoyo en la pared que mira en la Biblioteca. La exhibición estereógrafa de la barrera (esencialmente un holograma no activo que aparece diferente de ángulos diferentes) del gabinete de Jefferson.
Véase también
Referencias
- C. Teutsch, "Model-based Analysis and Evaluation of Point Sets from Optical 3D Laser Scanners", volume 1. Shaker Verlag, 2007. ISBN: 978-3-8322-6775-9
- François Blais, Michel Picard, Guy Godin, "Accurate 3D acquisition of freely moving objects," Proceedings. 2nd International Symposium on 3D Data Processing, Visualization and Transmission, 2004, pp.422-429.
- Qian Chen, Toshikazu Wada, "A light Modulation/Demodulation Method for Real-Time 3D Imaging," Fifth International Conference on 3-D Digital Imaging and Modeling, 2005, pp.15-21.
- Brian Curless, "From Range Scans to 3D Models," ACM SIGGRAPH Computer Graphics, Vol. 33, Issue 4, Nov 2000, pp.38-41.
- Joseph P. Lavelle, Stefan R. Schuet, Daniel J. Schuet, "High Speed 3D Scanner with Real-Time 3D Processing," 2004 IEEE International Workshop on Imaging Systems and Techniques, 2004, pp.13-17.
- Katsushi Lkeuchi, "Modeling from Reality," Third International Conference on 3-D Digital Imaging and Modeling, 2001, pp.117-124.
- ↑ Fausto Bernardini, Holly E. Rushmeier: The 3D Model Acquisition Pipeline. Comput. Graph. Forum 21(2): 149-172 (2002), (pdf).
- ↑ Roy Mayer, Scientific Canadian: Invention and Innovation From Canada's National Research Council, Vancouver: Raincoast Books, 1999.
- ↑ Song Zhang, Peisen Huang, "High-resolution, real-time 3-D shape measurement," Optical Engineering, 2006, pp.123601. (pdf)
- ↑ Marc Levoy, Jeremy Ginsberg, Jonathan Shade, Duane Fulk, Kari Pulli, Brian Curless, Szymon Rusinkiewicz, David Koller, Lucas Pereira, Matt Ginzton, Sean Anderson, James Davis, "The Digital Michelangelo Project: 3D Scanning of Large Statues," Proceedings of the 27th annual conference on Computer graphics and interactive techniques, 2000, pp.131-144. (pdf)
- ↑ David Luebke, Christopher Lutz, Rui Wang, and Cliff Woolley, “Scanning Monticello,” 2002, http://www.cs.virginia.edu/Monticello.
Enlaces externos
- Trimble Fabricante de equipos Laser de medio alcance
- Tabla de comparación de gran número de escáners 3D
- Curso de fotografía 3D
- MeshLab - Programa de código abierto para limpiar las mallas escaneadas
- Scanalyze - Programa de código abierto para alinear y unir datos de rango
- DAVID-Laserscanner - Programa gratuito para escaneos láser 3D
- Manual 3D scanner Descripción de la tecnología de escáner 3D
- GASPARI - KRUEGER. Servicio de relevamiento con Scanner Laser 3D Oferta se servicios de escanción Laser 3D
Categoría: Imagen 3D


Wikimedia foundation. 2010.