- Congestión del tráfico: Reconstrucción con la teoría de las tres fases del tráfico de Kerner
-
Los modelos de congestión del tráfico ASDA y FOTO,[1] [2] [3] [4] [5] los cuales se basan en la teoría de las tres fases del tráfico desarrollada por Boris Kerner, pueden reconocer y hacer seguimiento en el tiempo y el espacio de embotellamientos en las autopistas (Figura 1).
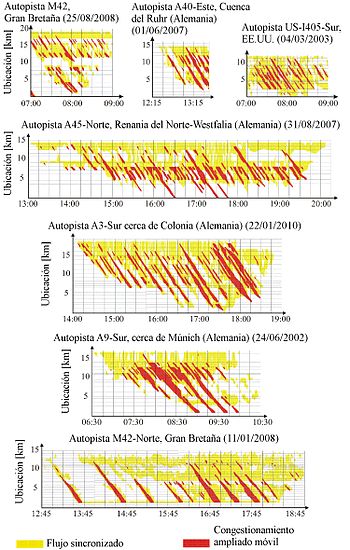 Figura 1. Ejemplos empíricos de la congestión del tráfico reconstruida por los modelos ASDA/FOTO utilizando datos en bruto medidos por detectores en diferentes autopistas de Alemania, Gran Bretaña y los EE.UU.. Representación de la congestión del tráfico en el plano espacio-tiempo a través de regiones asociadas con dos fases del tráfico cualitativamente diferentes en el tráfico congestionado: 1. Congestionamiento ampliado móvil (regiones rojas). 2. Flujo sincronizado (regiones amarillas). Regiones blancas - flujo libre
Figura 1. Ejemplos empíricos de la congestión del tráfico reconstruida por los modelos ASDA/FOTO utilizando datos en bruto medidos por detectores en diferentes autopistas de Alemania, Gran Bretaña y los EE.UU.. Representación de la congestión del tráfico en el plano espacio-tiempo a través de regiones asociadas con dos fases del tráfico cualitativamente diferentes en el tráfico congestionado: 1. Congestionamiento ampliado móvil (regiones rojas). 2. Flujo sincronizado (regiones amarillas). Regiones blancas - flujo libre
El modelo FOTO (Forecasting Of Traffic Objects (predicción de objetos de tráfico)) reconoce y hace seguimiento de las regiones del flujo sincronizado en el tiempo y el espacio. El modelo ASDA (Automatische StauDynamikAnalyse (seguimiento automático de congestionamientos ampliados móviles) reconoce y hace seguimiento de congestionamientos ampliados móviles. Los modelos ASDA/FOTO están diseñados para aplicaciones en línea sin necesidad de calibración de los parámetros del modelo bajo diferentes condiciones ambientales, de infraestructura vial, porcentaje de vehículos largos, etc.
Contenido
- 1 Características generales
- 2 ASDA/FOTO para mediciones locales
- 3 ASDA/FOTO para datos de mediciones móviles
- 4 Bibliografía
- 5 Referencias
- 6 Citas
- 7 Véase también
Características generales
El tráfico de vehículos puede ser libre o congestionado. El tráfico se produce en el tiempo y el espacio, es decir, es un proceso espacio-temporal. Sin embargo, por lo general el tráfico sólo puede ser medido en algunas secciones de una autopista (por ejemplo, a través de detectores, cámaras de video, datos de vehículos sonda, o datos de teléfonos). Para el control eficaz del tráfico y otros sistemas de transporte inteligentes, el reconocimiento de la congestión del tráfico es necesaria para todas las demás secciones de la autopista donde las mediciones no están disponibles.
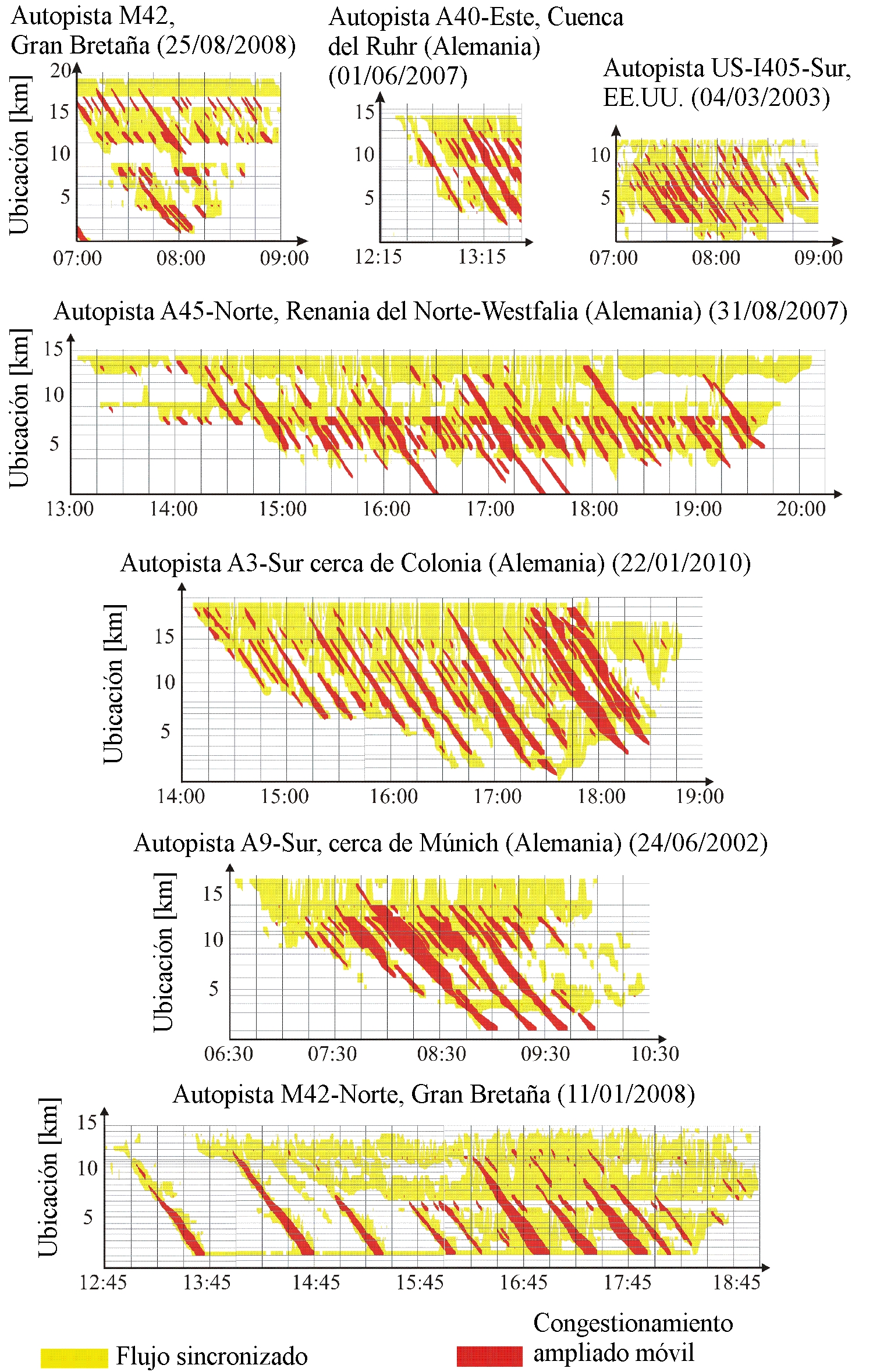
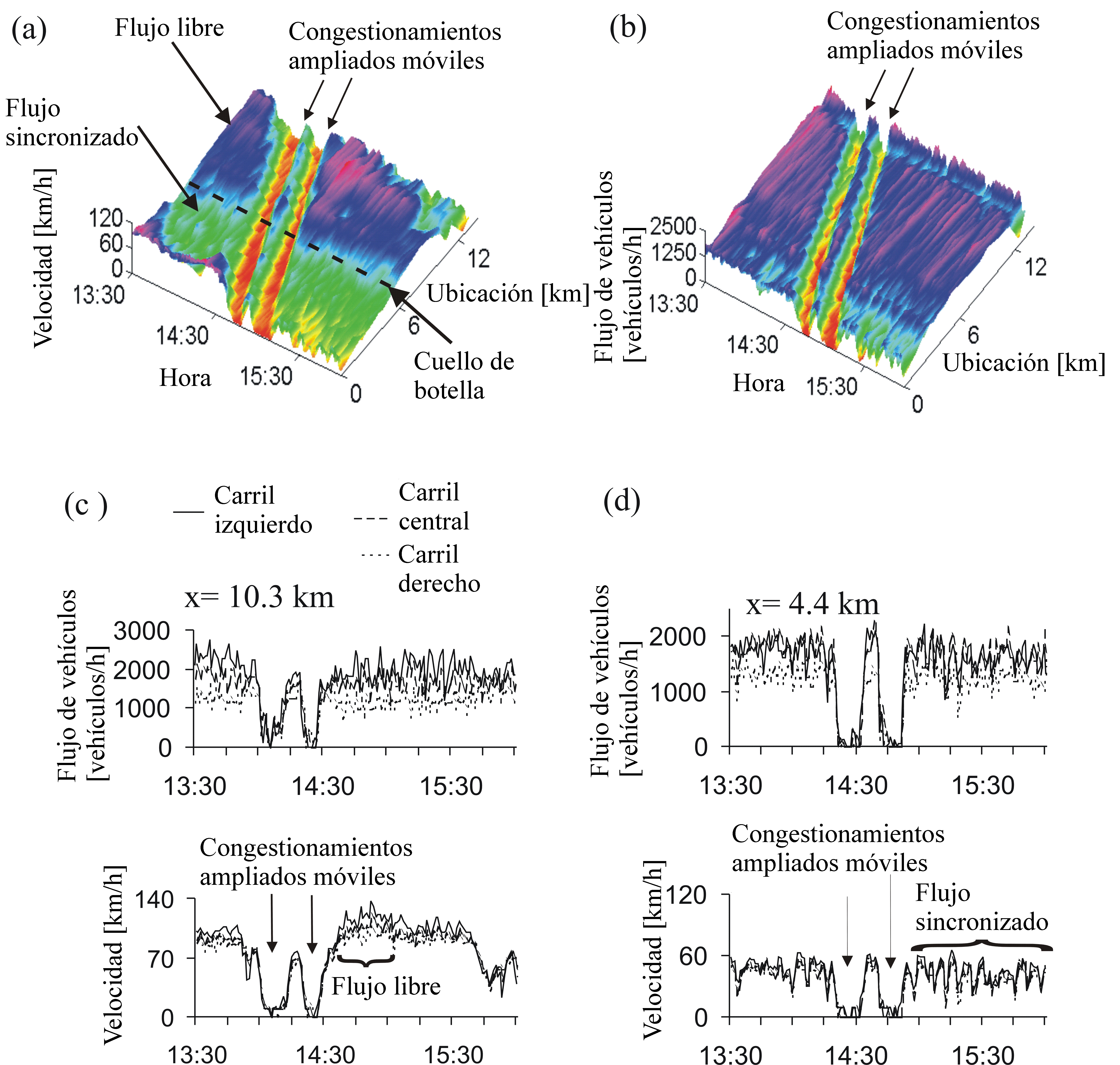
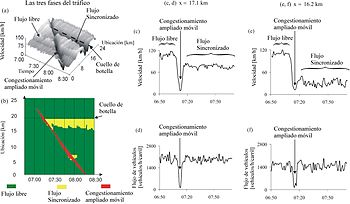 Figura 2. Características espacio-temporales comunes de la congestión del tráfico y fases del tráfico de la teoría de Kerner asociadas: (a) Datos obtenidos de las mediciones de las velocidades medias de los vehículos en el tiempo y el espacio. (b) Representación de los datos obtenidos en (a) en el plano tiempo-espacio. (c-f) Dependencias de tiempo de la velocidad (c, e) y del flujo de vehículos (d, f) en dos ubicaciones diferentes dentro de la congestión del tráfico mostrado en (a, b); los datos en (c, d) y (e, f) son medidos, respectivamente, en la ubicación del kilómetro 17,1 (c, d) (a favor del flujo en el cuello de botella de una rampa de acceso a la autopista con la etiqueta "Cuello de botella" en (a, b)) y en la posición del kilómetro 16,2 (e, f) (en contra del flujo del cuello de botella). En la ubicación del kilómetro 17,1 el flujo de vehículos (d) en fase de flujo libre y sincronizado es mayor en comparación con el del kilómetro 16,2 (f) debido al cuello de botella de la rampa.
Figura 2. Características espacio-temporales comunes de la congestión del tráfico y fases del tráfico de la teoría de Kerner asociadas: (a) Datos obtenidos de las mediciones de las velocidades medias de los vehículos en el tiempo y el espacio. (b) Representación de los datos obtenidos en (a) en el plano tiempo-espacio. (c-f) Dependencias de tiempo de la velocidad (c, e) y del flujo de vehículos (d, f) en dos ubicaciones diferentes dentro de la congestión del tráfico mostrado en (a, b); los datos en (c, d) y (e, f) son medidos, respectivamente, en la ubicación del kilómetro 17,1 (c, d) (a favor del flujo en el cuello de botella de una rampa de acceso a la autopista con la etiqueta "Cuello de botella" en (a, b)) y en la posición del kilómetro 16,2 (e, f) (en contra del flujo del cuello de botella). En la ubicación del kilómetro 17,1 el flujo de vehículos (d) en fase de flujo libre y sincronizado es mayor en comparación con el del kilómetro 16,2 (f) debido al cuello de botella de la rampa.En primer lugar, los modelos ASDA/FOTO identifican, de acuerdo con las propiedades medidas de los datos de la congestión del tráfico, las fases de flujo sincronizado y de congestionamiento ampliado móvil. Una de estas características empíricas, la cual los modelos ASDA/FOTO utilizan para el reconocimiento de las fases del tráfico, se muestra en la Figura 2. En la fase de congestionamiento ampliado móvil [CAM], tanto la velocidad como el flujo de vehículos son muy pequeños (Figura 2 (c-f)). En contraste, el flujo de vehículos en una zona de flujo sincronizado, puede ser tan grande como en una de flujo libre (Figura 2 (d, f)), incluso si la velocidad se reduce significativamente en comparación con la del flujo libre (Figura 2 (c, e)).
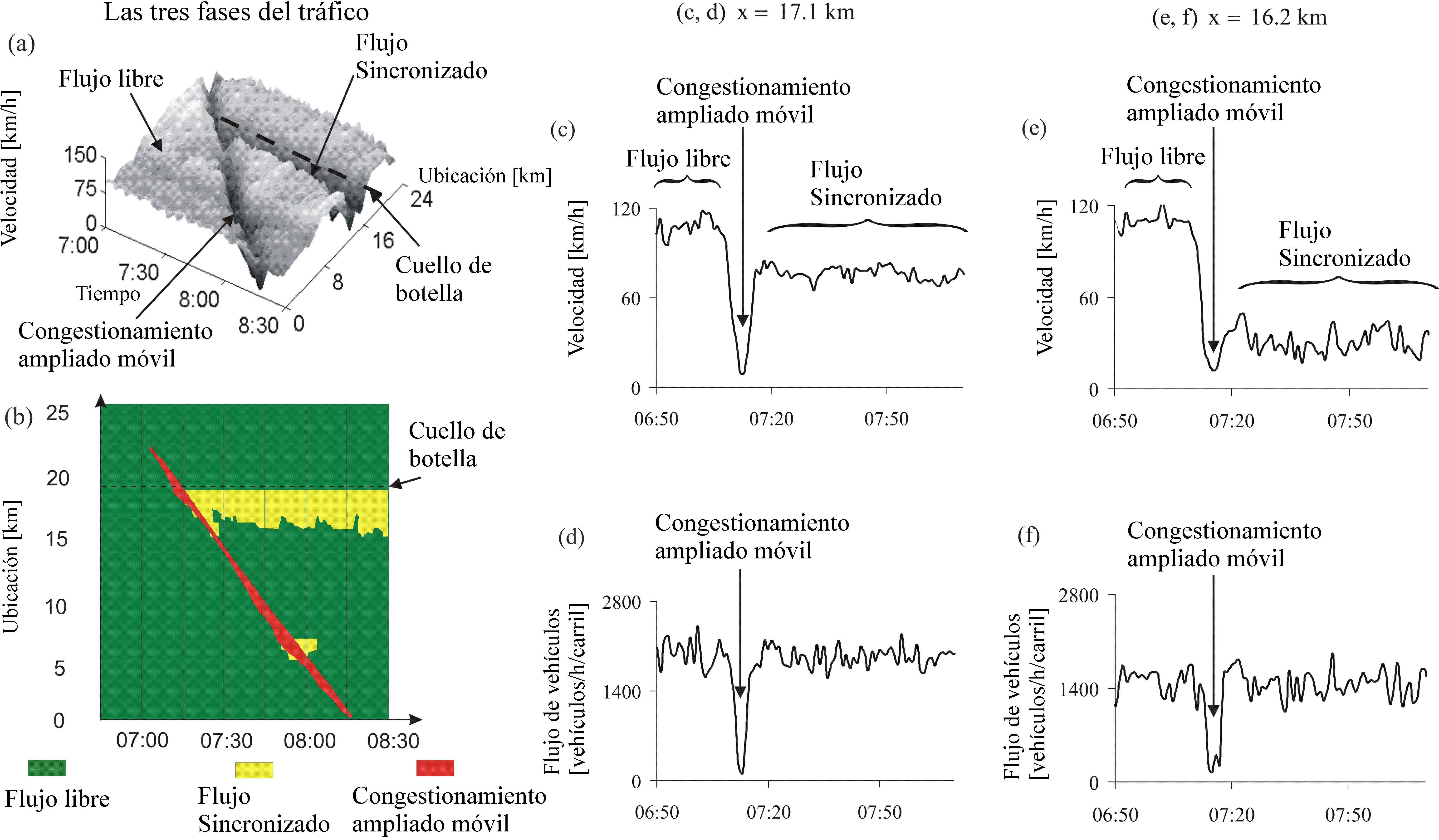
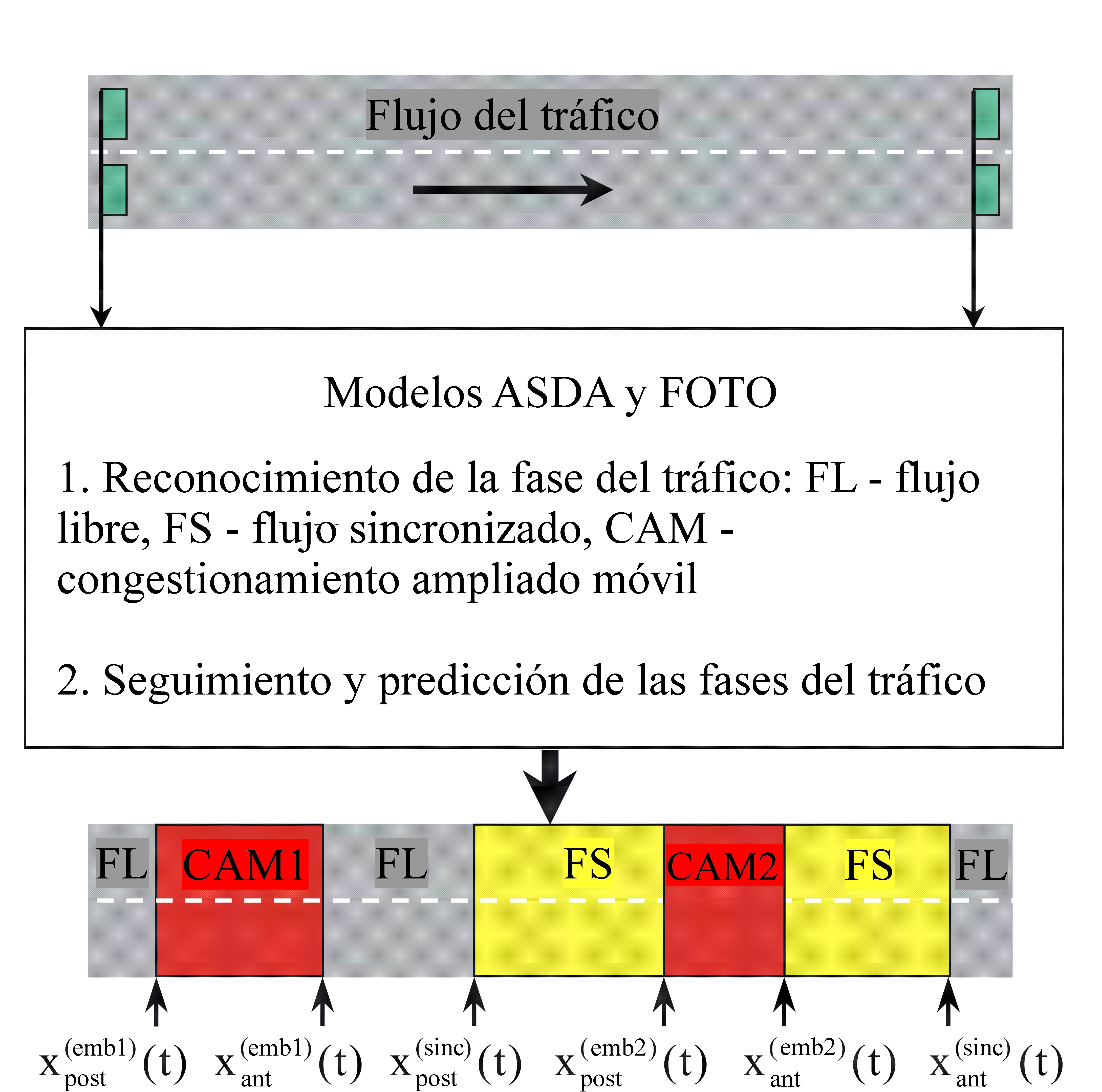
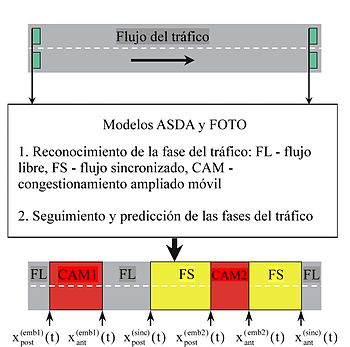 Figura 3. Modelos ASDA/FOTO. "emb1", "emb2" indican dos regiones diferentes en la fase CAM; "sinc" indica las zonas en la fase FS; "post" y "ant", indican los frentes posterior y anterior, respectivamente
Figura 3. Modelos ASDA/FOTO. "emb1", "emb2" indican dos regiones diferentes en la fase CAM; "sinc" indica las zonas en la fase FS; "post" y "ant", indican los frentes posterior y anterior, respectivamentePosteriormente, en base a las características comunes del congestionamiento ampliado móvil y del flujo sincronizado antes mencionadas, luego del reconocimiento de la fase [FS], el modelo FOTO sigue los frentes anterior y posterior del flujo sincronizado denotado por
 ,
,  , donde t es el tiempo (Figura 3). Así mismo, luego del reconocimiento de la fase [CAM], el modelo ASDA sigue los frentes anterior y posterior del congestionamiento ampliado móvil indicado por
, donde t es el tiempo (Figura 3). Así mismo, luego del reconocimiento de la fase [CAM], el modelo ASDA sigue los frentes anterior y posterior del congestionamiento ampliado móvil indicado por  ,
,  (Figura 3). Este seguimiento se lleva a cabo entre las posiciones de la autopista donde las fases del tráfico se han identificado inicialmente en los datos medidos, es decir, donde los frentes del flujo sincronizado y del congestionamiento ampliado móvil no pueden medirse.
(Figura 3). Este seguimiento se lleva a cabo entre las posiciones de la autopista donde las fases del tráfico se han identificado inicialmente en los datos medidos, es decir, donde los frentes del flujo sincronizado y del congestionamiento ampliado móvil no pueden medirse.En otras palabras, el seguimiento del flujo sincronizado por el modelo FOTO y del congestionamiento ampliado móvil por el modelo ASDA se lleva a cabo en las secciones de la autopista que no se dispone de mediciones, es decir, los modelos ASDA/FOTO predicen las posiciones de los frentes de los congestionamientos del tráfico en el tiempo, independientemente de los puntos de medición locales. Los modelos ASDA/FOTO nos permiten también predecir una fusión y/o una disolución de una o ambas fases del tráfico [CAM] y [FS] que ocurre entre puntos de medición individuales.
ASDA/FOTO para mediciones locales
Enfoque acumulativo de los flujos de tráfico en FOTO
Mientras que el frente anterior del flujo sincronizado, en el cual los vehículos aceleran al flujo libre, generalmente se fija al cuello de botella (ver Figura 2 (a, b)), el frente posterior del flujo sincronizado, en el cual los vehículos inicialmente en movimiento durante la fase de flujo libre deben desacelerar retrasándose al acercamiento del flujo sincronizado, se puede propagar en contra del flujo. En los datos del tráfico medidos se puede observar que la velocidad del frente posterior del flujo sincronizado depende tanto de las variables de tráfico internas del flujo sincronizado, como de las del flujo libre. Una buena aproximación a los datos empíricos medidos se puede lograr si la dependencia de tiempo del frente posterior del flujo sincronizado es calculada con el modelo FOTO haciendo uso del llamado enfoque acumulativo del flujo de tráfico:

donde qFL y qFS [vehículos/h] son, respectivamente, los flujos de vehículos de los frentes anterior y posterior del flujo sincronizado, μ es un parámetro del modelo [m/vehículos], y n es el número de carriles de la autopista.
Dos enfoques para el seguimiento de congestionamiento en ASDA
Hay dos enfoques principales para el seguimiento de los congestionamientos ampliados móviles con el modelo ASDA:
- Mediante el uso de la fórmula de onda de choque de Stokes.
- Mediante el uso de la velocidad característica de los congestionamientos ampliados móviles.
Utilización de la fórmula de onda de choque de Stokes
La velocidad actual v(emb) de un frente de un congestionamiento ampliado móvil se calcula mediante el uso de la fórmula de onda de choque desarrollada por Stokes en 1848:[6]

donde q1 y ρ1 son el flujo y la densidad de vehículos, respectivamente, en contra del flujo del embotellamiento; q2 y ρ2 son el flujo y la densidad de vehículos, respectivamente, a favor del flujo del embotellamiento. En (2) no hay ninguna relación, en particular, no se supone ningún esquema fundamental entre los flujos q1, q2 y las densidades ρ1, ρ2 de vehículos. Los valores se determinan a partir de datos medidos en forma independiente.
Utilización de la velocidad característica de los congestionamientos ampliados móviles
Si los datos de medición no están disponibles para el seguimiento del frente anterior del embotellamiento con la fórmula de onda de choque de Stokes (2), se usa la fórmula

donde vg es la velocidad característica del frente anterior del embotellamiento asociada con la propiedad característica del embotellamiento de Kerner [CAM] discutida arriba. Esto significa que después de que el frente anterior de un congestionamiento ampliado móvil ha sido identificado en el instante de tiempo t = t1, la ubicación del frente anterior del embotellamiento se puede estimar con la fórmula

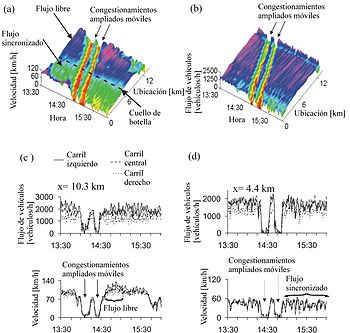 Figura 4. Medición de datos del tráfico que ilustran la propiedad característica del embotellamiento [CAM]: (a, b) La velocidad media (a) y el flujo de vehículos (b) en el espacio y el tiempo. (C, d) La dependencia de tiempo del flujo de vehículos y de la velocidad dentro de la congestión del tráfico en (a, b) en dos ubicaciones diferentes de la autopista se muestra para cada uno de los tres carriles de la misma
Figura 4. Medición de datos del tráfico que ilustran la propiedad característica del embotellamiento [CAM]: (a, b) La velocidad media (a) y el flujo de vehículos (b) en el espacio y el tiempo. (C, d) La dependencia de tiempo del flujo de vehículos y de la velocidad dentro de la congestión del tráfico en (a, b) en dos ubicaciones diferentes de la autopista se muestra para cada uno de los tres carriles de la mismaLa velocidad característica del embotellamiento se ilustra en la Figura 4. Dos congestionamientos ampliados móviles se propagan a través de una sección de la autopista uno detrás del otro en contra del flujo manteniendo la velocidad media de sus frentes anteriores. Sin embargo, en contraste con la velocidad media del frente anterior del embotellamiento, la velocidad media del frente posterior del embotellamiento depende del flujo y de la densidad de vehículos, que se mueve en contra del flujo del embotellamiento. Por lo tanto, el uso de la fórmula (4) puede conducir a un gran error en la estimación de la velocidad media del frente posterior del embotellamiento.
En base a una gran cantidad de datos medidos en autopistas alemanas se ha determinado un valor de
 . Sin embargo, aunque la velocidad media vg del frente anterior del embotellamiento es independiente del flujo y de la densidad de vehículos a favor y en contra del flujo del embotellamiento, vg puede depender considerablemente de parámetros del tráfico tales como, porcentaje de vehículos largos, clima, características del conductor, etc. Como resultado, la velocidad media vg encontrada en diferentes datos medidos en años de observaciones varía aproximadamente dentro del rango −12 > vg > −20 km/h.
. Sin embargo, aunque la velocidad media vg del frente anterior del embotellamiento es independiente del flujo y de la densidad de vehículos a favor y en contra del flujo del embotellamiento, vg puede depender considerablemente de parámetros del tráfico tales como, porcentaje de vehículos largos, clima, características del conductor, etc. Como resultado, la velocidad media vg encontrada en diferentes datos medidos en años de observaciones varía aproximadamente dentro del rango −12 > vg > −20 km/h.Aplicaciones en línea de ASDA/FOTO en centros de control de tráfico
ASDA/FOTO se utiliza hoy en día de manera permanente en el centro de control del tráfico del estado federal de Hessen (Alemania) a lo largo de 1200 kilómetros de autopistas. Desde abril del 2004 se analizan con ASDA/FOTO datos medidos automáticamente por 2500 detectores. Los patrones de tráfico espacio-temporales resultantes se muestran en un gráfico espacio-temporal en la Figura 5. En el 2007, el sistema en línea ASDA/FOTO se ha aplicado en las autopistas de Renania del Norte-Westfalia (Alemania). Los datos en bruto son enviados a la WDR, la mayor emisora de radio pública de dicho estado alemán, con sede en Colonia, la cual emite información del tráfico para los oyentes a través de la radio RDS. La aplicación ASDA/FOTO puede procesar una parte considerable de la red total de autopistas de Renania del Norte-Westfalia, con 1900 kilómetros de longitud y más de 1000 detectores de lazo doble. Además, desde el 2009 los modelos ASDA/FOTO en línea se utilizan también en el norte de Baviera, Alemania.
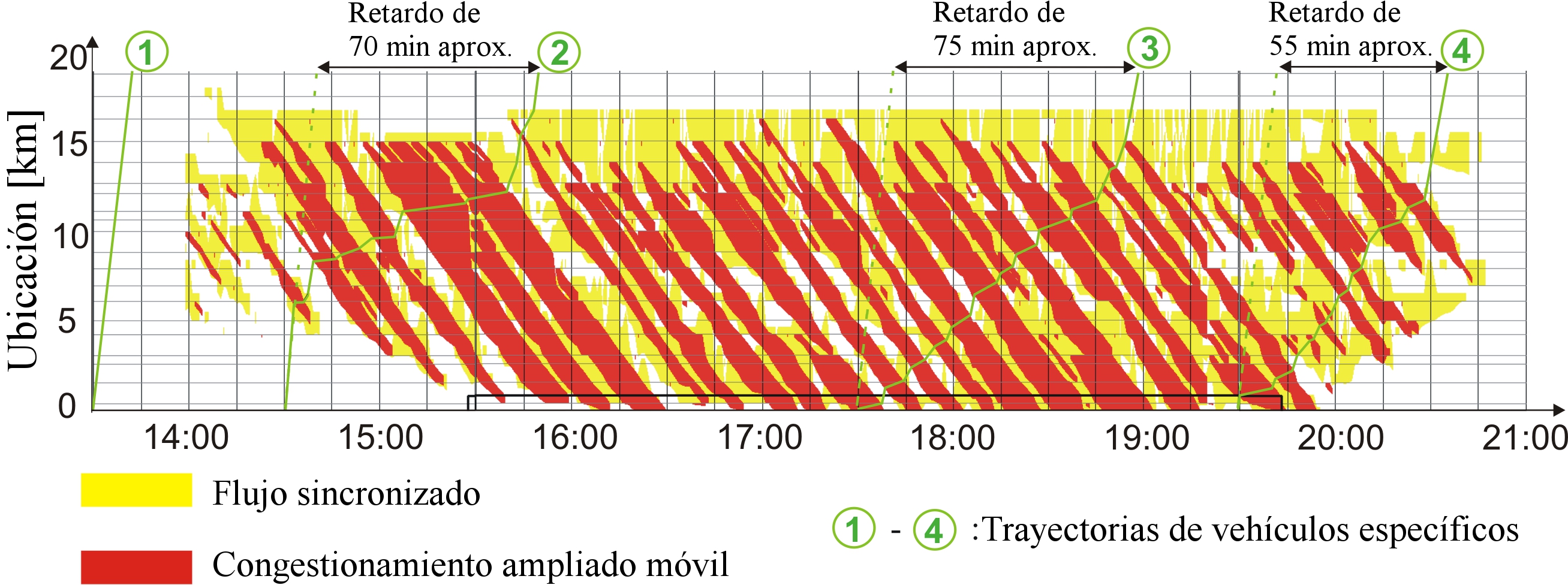
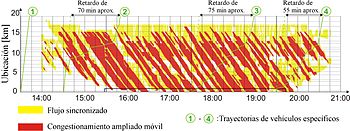 Figura 5. Patrones de tráfico congestionado reconstruidos por los modelos ASDA/FOTO: gráfico espacio-temporal con trayectorias de vehículos 1-4 y respectivos tiempos de viaje. Los datos de entrada para los modelos ASDA/FOTO fueron medidos por detectores ubicados en la autopista A5-Norte en Hessen, Alemania, el 06/04/2006
Figura 5. Patrones de tráfico congestionado reconstruidos por los modelos ASDA/FOTO: gráfico espacio-temporal con trayectorias de vehículos 1-4 y respectivos tiempos de viaje. Los datos de entrada para los modelos ASDA/FOTO fueron medidos por detectores ubicados en la autopista A5-Norte en Hessen, Alemania, el 06/04/2006Parámetros promedio del flujo de vehículos y tiempos de viaje
Además de la reconstrucción espacio-temporal de la congestión del tráfico (Figuras 1 y 5) los modelos ASDA/FOTO pueden proporcionar parámetros promedio del flujo del tráfico dentro del flujo sincronizado y del congestionamiento ampliado móvil. Esto permite a su vez la estimación de tiempos de viaje en una sección determinada de la autopista o a lo largo de cualquier trayectoria de un vehículo (ver ejemplos de las trayectorias 1-4 en la Figura 5).
ASDA/FOTO para datos de mediciones móviles
ASDA/FOTO se puede utilizar también para la reconstrucción de patrones de tráfico sobre la base de datos obtenidos de fuentes móviles (por ejemplo, vehículos, dispositivos móviles).[7] [8] En primer lugar, ASDA/FOTO determina los puntos de transición para las transiciones de fase a lo largo de la trayectoria de un vehículo. Cada uno de los puntos de transición está asociado al frente que separa dos de las tres fases diferentes la una de la otra (flujo libre (FL), flujo sincronizado (FS), congestionamiento ampliado móvil (CAM)). Una vez que estos puntos de transición han sido identificados, ASDA/FOTO reconstruye las regiones de flujo sincronizado y de congestionamiento ampliado móvil. Para esta reconstrucción ASDA/FOTO utiliza las características empíricas de las fases del tráfico discutidas anteriormente (ver las Figuras 2 y 4).
Bibliografía
- B.S. Kerner, Introduction to Modern Traffic Flow Theory and Control: The Long Road to Three-Phase Traffic Theory, Springer, Berlin, New York 2009
- B.S. Kerner, The Physics of Traffic, Springer, Berlin, New York 2004
Referencias
- Kerner B. S., Konhäuser P. (1994). Structure and parameters of clusters in traffic flow, Physical Review E, Vol. 50, 54
- Kerner B. S., Rehborn H. (1996). Experimental features and characteristics of traffic jams. Physical Review E, Vol. 53, 1297
- Kerner B. S., Rehborn H. (1996). Experimental properties of complexity in traffic flow. Physical Review E, Vol. 53, R4257
- Kerner B. S., Kirschfink H., Rehborn H. (1997) Automatische Stauverfolgung auf Autobahnen, Straßenverkehrstechnik, No. 9, pp 430–438
- Kerner B. S., Rehborn H. (1998) Messungen des Verkehrsflusses: Charakteristische Eigenschaften von Staus auf Autobahnen, Internationales Verkehrswesen, 5/1998, pp 196–203
- Kerner B. S., Rehborn H., Aleksić M., Haug A., Lange R. (2000) Verfolgung und Vorhersage von Verkehrsstörungen auf Autobahnen mit ”ASDA” und ”FOTO” im online-Betrieb in der Verkehrsrechnerzentrale Rüsselsheim, Straßenverkehrstechnik, No. 10, pp 521–527
- Kerner B. S., Rehborn H., Aleksić M., Haug A. (2001) Methods for Tracing and Forecasting of Congested Traffic Patterns on Highways, Traffic Engineering and Control, 09/2001, pp 282–287
- Kerner B. S., Rehborn H., Aleksić M., Haug A., Lange R. (2001) Online Automatic tracing and forecasting of traffic patterns with models “ASDA” and “FOTO”, Traffic Engineering and Control, 11/2001, pp 345–350
- Kerner B. S., Rehborn H., Aleksić M., Haug A. (2004): Recognition and Tracing of Spatial-Temporal Congested Traffic Patterns on Freeways, Transportation Research C, 12, pp 369–400
- Palmer J., Rehborn H. (2007) ASDA/FOTO based on Kerner’s Three-Phase Traffic Theory in North-Rhine Westfalia (in German), Straßenverkehrstechnik, No. 8, pp 463–470
- Palmer J., Rehborn H., Mbekeani L. (2008) Traffic Congestion Interpretation Based on Kerner’s Three-Phase Traffic Theory in USA, In: Proceedings 15th World Congress on ITS, New York
- Palmer J., Rehborn H. (2009) Reconstruction of congested traffic patterns using traffic state detection in autonomous vehicles based on Kerner’s three-phase traffic theory, In: Proceedings of. 16th World Congress on ITS, Stockholm
- Rehborn H, Klenov S.L. (2009) Traffic Prediction of Congested Patterns, In: R. Meyers (Ed.): Encyclopedia of Complexity and Systems Science, Springer New York, 2009, pp 9500–9536
- Boris S. Kerner, Rehborn H, Klenov S L, Palmer J, Prinn M (2009) Verfahren zur Verkehrszustandsbestimmung in einem Fahrzeug, (Method for traffic state detection in a vehicle), German Patent publication DE 10 2008 003 039 A1.
Citas
- ↑ Boris S. Kerner, Kirschfink H, Rehborn H; Method for the automatic monitoring of traffic including the analysis of back-up dynamics, Deutsches Patent DE19647127C2, USA patent: US 5861820 (Filed: 1996)
- ↑ Boris S. Kerner, Rehborn H., Traffic surveillance method and vehicle flow control in a road network, Deutsche Patentoffenlegung DE19835979A1, USA patent: US 6587779B1 (Filed: 1998)
- ↑ Boris S. Kerner, M. Aleksić, U. Denneler; Verfahren und Vorrichtung zur Verkehrszustandsüberwachung, Deutsches Patent DE19944077C1 (Filed: 1999)
- ↑ Boris S. Kerner; Method for monitoring the condition of traffic for a traffic network comprising effective narrow points, Deutsche Patentoffenlegung DE19944075A1; USA patent: US 6813555B1; Japan: JP 2002117481 (Filed: 1999)
- ↑ Boris S. Kerner Deutsches Patent DE10036789A1; Method for determining the traffic state in a traffic network with effective bottlenecks, USA patent: US 6522970B2 (Filed: 2000)
- ↑ George G. Stokes, "On a difficulty in the theory of sound", Philosopical Magazine, 33, pp 349-356 (1848)
- ↑ B.S. Kerner, H. Rehborn, J. Palmer, S.L. Klenov, Using probe vehicle to generate jam warning messages, Traffic Engineering and Control Vol 52, No 3 141-148 (2011)
- ↑ J. Palmer, H. Rehborn, B.S. Kerner, ASDA and FOTO Models based on Probe Vehicle Data, Traffic Engineering and Control Vol 52 No 4, 183-191 (2011)
Véase también
Categorías:- Ingeniería vial
- Transporte por carretera
Wikimedia foundation. 2010.