- Teoría de las tres fases del tráfico
-
La Teoría de las tres fases del tráfico fue desarrollada por Boris Kerner entre 1996 y 2002.[1] [2] [3] En ella se presenta un nuevo enfoque para el fenómeno del colapso del tráfico, entendiéndose como colapso a la repentina degradación de la libre circulación, y el tráfico resultante en las autopistas congestionadas. Mientras que las teorías del tráfico clásicas basadas en el esquema fundamental de la circulación tienen dos fases, flujo libre y tráfico congestionado, Kerner describe tres fases. Dividiendo en dos fases distintas el tráfico congestionado, flujo sincronizado y congestionamiento ampliado móvil, con lo que el número total de fases es tres:
 Tráfico sincronizado
Tráfico sincronizado
 Embotellamiento
Embotellamiento- Flujo libre (FL)
- Flujo sincronizado (FS)
- Congestionamiento ampliado móvil (CAM)
Una fase se define como un estado en el espacio y el tiempo.
Flujo libre (FL)
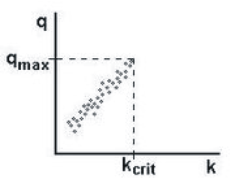
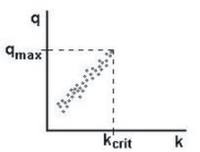 Figura 1: Resultados de mediciones reales que muestran la relación entre el flujo y la densidad de vehículos en la fase de flujo libre
Figura 1: Resultados de mediciones reales que muestran la relación entre el flujo y la densidad de vehículos en la fase de flujo libreEn la fase de flujo libre, los conductores pueden elegir libremente su velocidad. Los datos empíricos muestran una correlación positiva entre el caudal o flujo del tráfico q (vehículos por unidad de tiempo) y la densidad del tráfico k (vehículos por unidad de espacio). Esta relación tiene un límite superior en el punto máximo del flujo libre, cuando el caudal del tráfico es qmax y la correspondiente densidad crítica kcrit (Figura 1).
Tráfico congestionado
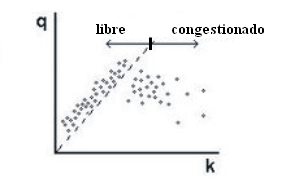
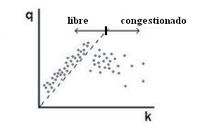 Figura 2: Datos obtenidos empíricamente en las fases de flujo libre y de tráfico congestionado
Figura 2: Datos obtenidos empíricamente en las fases de flujo libre y de tráfico congestionadoEn el tráfico congestionado, la velocidad del vehículo es inferior a la velocidad mínima posible
 en el flujo libre. Así, la línea con la pendiente de la velocidad mínima
en el flujo libre. Así, la línea con la pendiente de la velocidad mínima  (línea punteada en la Figura 2) divide los datos empíricos del plano flujo-densidad en dos regiones: en el lado izquierdo se encuentran los datos correspondientes al flujo libre y en el lado derecho los datos correspondientes al tráfico congestionado.
(línea punteada en la Figura 2) divide los datos empíricos del plano flujo-densidad en dos regiones: en el lado izquierdo se encuentran los datos correspondientes al flujo libre y en el lado derecho los datos correspondientes al tráfico congestionado.Definiciones de las fases CAM y FS en el tráfico congestionado
Las definiciones de las fases CAM y FS derivan del resultado de investigaciones empíricas sobre las características espacio-temporales de los datos del tráfico.
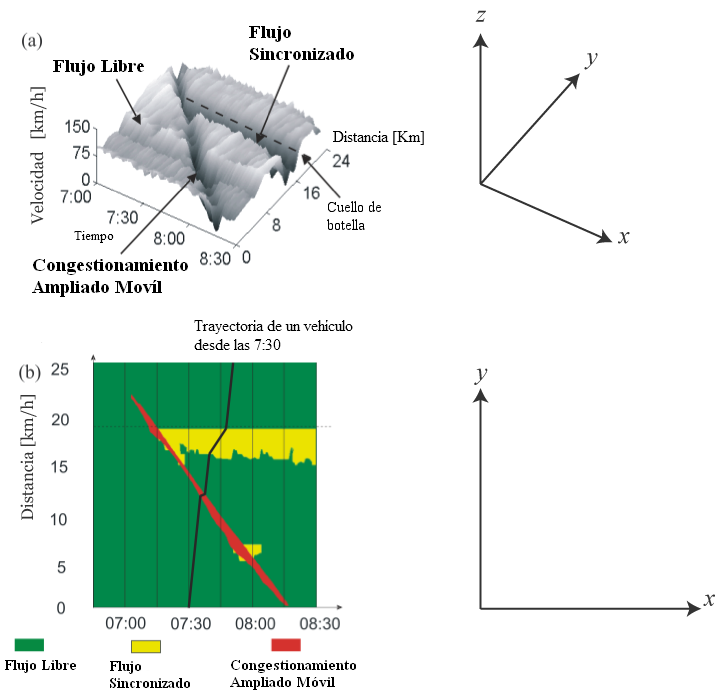
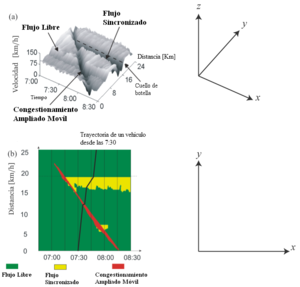 Figura 3: Datos medidos de velocidades en el espacio y el tiempo (a) y su representación en el plano espacio-temporal (b)
Figura 3: Datos medidos de velocidades en el espacio y el tiempo (a) y su representación en el plano espacio-temporal (b)Características espacio-temporales comunes de la congestión del tráfico
Las características espacio-temporales comunes de la congestión del tráfico son aquellas que son cualitativamente iguales para diferentes autopistas en diferentes países, medidas durante años de observaciones del tráfico. En particular, estas características comunes de la congestión del tráfico son independientes en cuanto al clima, las condiciones de las autopistas y la infraestructura vial, la tecnología vehicular, las características del conductor, la hora del día, etc. Las definiciones de Kerner [FS] y [CAM], para las fases de flujo sincronizado y de congestionamiento ampliado móvil, respectivamente, cuando hay tráfico congestionado[1] [2] [3] son ejemplos de las características espacio-temporales comunes de la congestión del tráfico obtenidas empíricamente.
Propagación del congestionamiento ampliado móvil a través de los cuellos de botellas en las autopistas
En las observaciones empíricas, la congestión del tráfico ocurre generalmente en un cuello de botella como consecuencia del colapso del tráfico en un flujo inicialmente libre en dicho cuello de botella. Éste puede resultar de las rampas de entrada y salida, curvas y pendientes, obras viales, etc. En el tráfico congestionado (sinónimo de embotellamiento del tráfico) se observa a menudo el fenómeno de la propagación de un congestionamiento ampliado móvil (congestionamiento móvil, para abreviar). Un congestionamiento móvil es una región de baja velocidad y gran densidad que se propaga en contra del flujo como un todo. La región del embotellamiento está limitada espacialmente por dos frentes. En el frente anterior, los vehículos aceleran a una velocidad mayor en sentido contrario al del congestionamiento. En el frente posterior, los vehículos desaceleran al acercarse al mismo. Un congestionamiento ampliado móvil es un congestionamiento móvil que muestra la propiedad característica del congestionamiento ampliado móvil [CAM], la cual es una característica espacio-temporal común de la congestión del tráfico.
Definición del congestionamiento ampliado móvil [CAM]
Un congestionamiento ampliado móvil [CAM] se propaga a través de los cuellos de botella, manteniendo la velocidad media del frente anterior del embotellamiento indicado por vg. Esta propiedad del congestionamiento [CAM] se puede explicar de la siguiente manera. El movimiento del frente anterior de un congestionamiento ampliado móvil resulta de la aceleración de los conductores que estan quietos dentro del embotellamiento. Después de que un vehículo ha comenzado a acelerar, para escapar del embotellamiento hacia la libre circulación, el vehículo siguiente comienza a acelerar, manteniendo una distancia segura, con un retardo de tiempo. Podemos denotar el valor medio de este retardo por
 . Debido a que la distancia media entre los vehículos dentro del embotellamiento, incluido el largo medio de los vehículos, igual a
. Debido a que la distancia media entre los vehículos dentro del embotellamiento, incluido el largo medio de los vehículos, igual a  (donde ρmax es la densidad media de los vehículos dentro del embotellamiento), la velocidad media del frente anterior del embotellamiento vg es
(donde ρmax es la densidad media de los vehículos dentro del embotellamiento), la velocidad media del frente anterior del embotellamiento vg es
Cuando los parámetros de tráfico (porcentaje de vehículos largos, clima, características del conductor, etc.) no cambian con el tiempo,
y ρmax son constantes en el tiempo. Esto explica por qué la velocidad media del frente anterior del embotellamiento vg es el parámetro característico que no depende de los flujos y las densidades de vehículos en los frentes anterior y posterior del embotellamiento."Efecto captura": captura del frente anterior del flujo sincronizado en el cuello de botella
En contraste con las propiedades de [CAM], la velocidad media del frente anterior del flujo sincronizado no es mantenida durante la propagación del mismo. Esta es la propiedad común del flujo sincronizado que es una de las dos fases de la congestión del tráfico. Un caso particular de esta característica común del flujo sincronizado es que el frente anterior de éste es capturado en un cuello de botella de la autopista. Este proceso de captura del frente anterior del flujo sincronizado en el cuello de botella es llamado efecto captura. Hay que tener en cuenta que en este frente anterior del flujo sincronizado, los vehículos aceleran de una velocidad más baja, dentro del flujo en el frente posterior, hacia una velocidad mayor, dentro del flujo libre en el frente anterior de éste.
Definición del flujo sincronizado [FS]
El flujo sincronizado se define como la congestión del tráfico que no presenta la propiedad característica de [CAM], en particular, el frente anterior del flujo sincronizado con frecuencia se fija al cuello de botella. Así las definiciones [CAM] y [FS] de Kerner para las fases de congestionamiento ampliado móvil y de flujo sincronizado de la teoría de las tres fases del tráfico[1] [2] [3] son asociadas con características comunes de la congestión del tráfico.
Explicación de las definiciones de las fases del tráfico basada en datos empíricos
Datos medidos de las velocidades promedios de los vehículos (Figura 3 (a)) ilustran las definiciones anteriores. En la Figura 3 (a) se puede ver que hay dos patrones espacio-temporales del tráfico congestionado donde los vehículos presentan velocidades bajas. Un patrón se propaga en contra del flujo con una velocidad mayoritariamente constante en el frente posterior a través del cuello de botella. De acuerdo con la definición [CAM] este patrón pertenece a la fase de “congestionamiento ampliado móvil”. Por el contrario, el frente anterior del otro patrón se fija al cuello de botella. De acuerdo con la definición [FS] este patrón pertenece a la fase de “flujo sincronizado” (Figura 3 (a) y (b)).
La Figura 3 (a) ilustra el comportamiento espacio-temporal del tráfico. El eje x corresponde al tiempo. En el eje y se muestra la posición en la autopista, orientado en el sentido de la dirección del tráfico. El eje z muestra las velocidades. Así, la representación en tres dimensiones permite comprobar cuál era la velocidad en cada sección de la autopista para cada horario. Aunque no permite una lectura de los datos muy práctica, se trata de una excelente representación para analizar cualitativamente el comportamiento de las velocidades a lo largo de la autopista en función del tiempo, es decir, para analizar el comportamiento de las velocidades con un enfoque espacio-temporal. Por ejemplo, los surcos (bandas más oscuras) que aparecen en la Figura 3 (a) corresponden una disminuciones bruscas de la velocidad. Se pueden observar dos surcos en la figura, uno de ellos es oblicuo y otro paralelo al eje de tiempo.
La hipótesis fundamental de la teoría de las tres fases del tráfico de Kerner
Estados homogéneos del flujo sincronizado
La hipótesis fundamental de esta teoría se asocia a estados homogéneos del flujo sincronizado. Un estado homogéneo de flujo sincronizado es un estado hipotético de flujo sincronizado de vehículos y conductores idénticos, en el cual todos los vehículos se mueven con la misma velocidad independiente del tiempo y en los mismos intervalos de espacio (siendo un intervalo de espacio la distancia neta entre dos vehículos sucesivos), es decir, este flujo sincronizado es homogéneo en el tiempo y el espacio.
Infinito número de intervalos de espacio entre vehículos a una velocidad dada
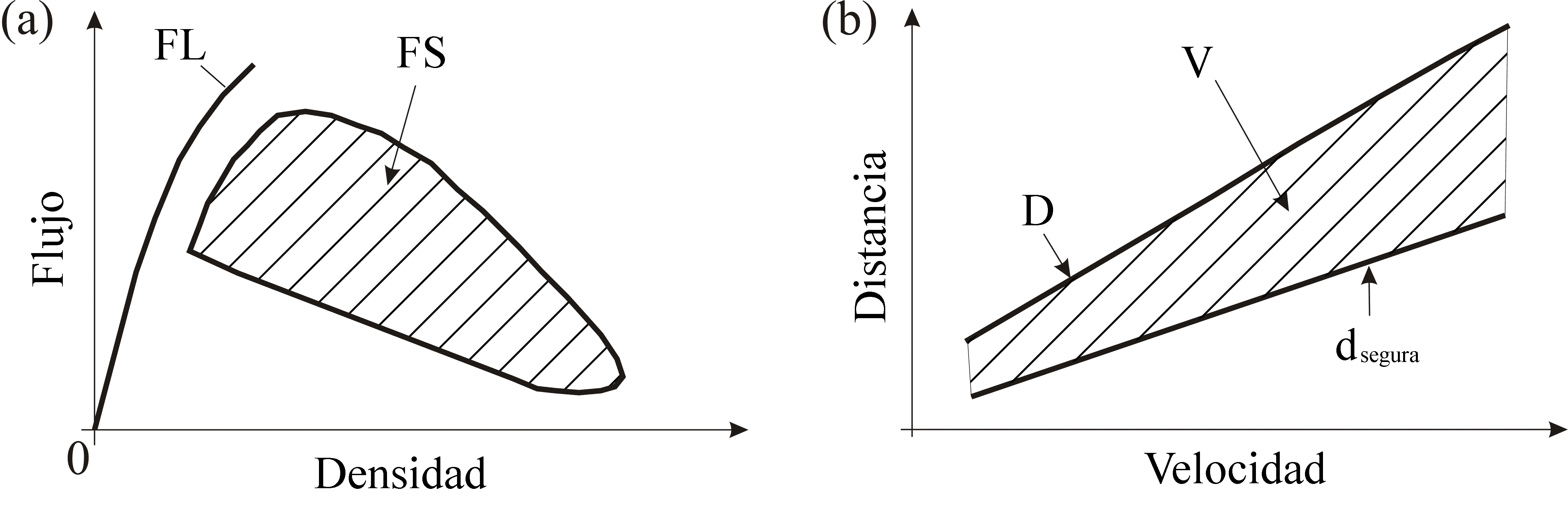
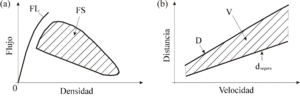 Figura 4: Hipótesis fundamental de la teoría de las tres fases del tráfico de Kerner: (a) Representación cualitativa de los estados de flujo libre (FL) y de la región de los estados homogéneos del flujo sincronizado (región rayada FS) en una autopista de varios carriles en el plano flujo-densidad. (b) Parte de la región de los estados homogéneos del flujo sincronizado mostrados en (a) en el plano distancia-velocidad (región rayada FS). En (b) d es la distancia de sincronización y dsegura la distancia de seguridad entre los dos vehículos consecutivos
Figura 4: Hipótesis fundamental de la teoría de las tres fases del tráfico de Kerner: (a) Representación cualitativa de los estados de flujo libre (FL) y de la región de los estados homogéneos del flujo sincronizado (región rayada FS) en una autopista de varios carriles en el plano flujo-densidad. (b) Parte de la región de los estados homogéneos del flujo sincronizado mostrados en (a) en el plano distancia-velocidad (región rayada FS). En (b) d es la distancia de sincronización y dsegura la distancia de seguridad entre los dos vehículos consecutivosLa hipótesis fundamental es la siguiente: los estados homogéneos del flujo sincronizado cubren una región bidimensional en el plano flujo-densidad (región FS en la Figura 4 (a)). La cantidad posible de estados de flujo libre (FL) se solapan con la cantidad de estados homogéneos de flujo sincronizado para una densidad de vehículos dada. Los estados de flujo libre en una autopista de varios carriles y los estados homogéneos de flujo sincronizado están separados por un hueco en el flujo del tráfico y, por tanto, por un hueco en la velocidad a una densidad de tráfico dada: en cada densidad de tráfico la velocidad del flujo sincronizado es menor que la velocidad del flujo libre. De acuerdo con esta hipótesis, a una velocidad dada dentro de la región del flujo sincronizado, un conductor puede decidir arbitrariamente la distancia entre él y el vehículo que va delante, dentro de un rango limitado de espacio, correspondiente con la región de estados homogéneos de flujo sincronizado (Figura 4 (b)): un conductor acepta diferentes distancias en diferentes momentos y no controla una distancia fija para el vehículo que va delante. La hipótesis fundamental de la teoría de las tres fases del tráfico de Kerner esta en contradicción con las teorías del flujo del tráfico clásicas a cerca del diagrama fundamental del tráfico, donde se establece una relación unidimensional entre la densidad del tráfico y el flujo del mismo.
Secuencia de los vehículos en la teoría de las tres fases del tráfico
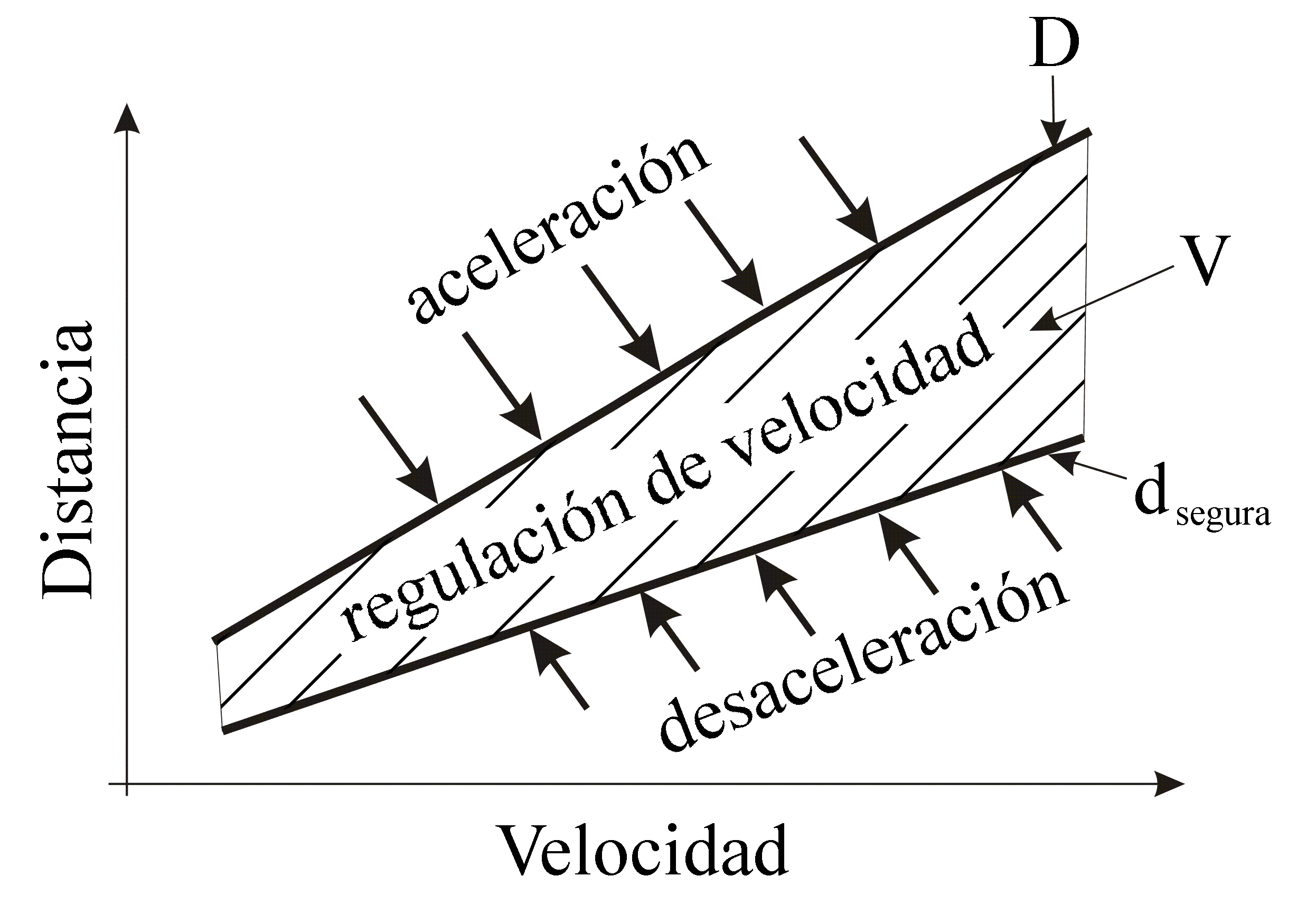
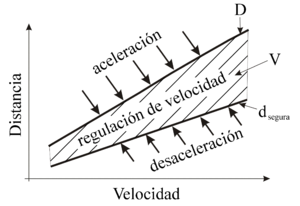 Figura 5: Representación cualitativa de la secuencia de los vehículos en la teoría de las tres fases del tráfico de Kerner: un vehículo acelera a una distancia d > D y desacelera a una distancia d < dsegura, bajo esta condición
Figura 5: Representación cualitativa de la secuencia de los vehículos en la teoría de las tres fases del tráfico de Kerner: un vehículo acelera a una distancia d > D y desacelera a una distancia d < dsegura, bajo esta condición el vehículo regula su velocidad a la velocidad del vehículo de adelante sin poner cuidado a una distancia precisa. La región rayada del flujo sincronizado se toma de la Figura 4 (b)
el vehículo regula su velocidad a la velocidad del vehículo de adelante sin poner cuidado a una distancia precisa. La región rayada del flujo sincronizado se toma de la Figura 4 (b)En la teoría de las tres fases del tráfico de Kerner, un vehículo acelera cuando la distancia d entre él y el vehículo de adelante es mayor que una distancia de sincronización D, es decir, d > D (marcada por la aceleración en la Figura 5), y un vehículo desacelera cuando la distancia d es menor que una distancia segura dsegura, es decir, cuando d < dsegura (marcada por la desaceleración en la Figura 5). La distancia de sincronización D es una distancia d entre un vehículo y el vehículo de adelante con el cual el primer vehículo tiende a regular su velocidad a la velocidad del segundo vehículo sin poner cuidado a una distancia exacta, siempre y cuando esta distancia no sea menor que la distancia segura dsegura (marcada por la regulación de velocidad en la Figura 5). Así, la distancia d del vehículo puede ser cualquier distancia dentro del rango
.Colapso del tráfico - una transición de fase FL → FS
Según datos medidos, la congestión de tráfico ocurre generalmente en los cuellos de botella de la autopista, por ejemplo, en las rampas de entrada y salida, o en los tramos en construcción o reparación. Esta transición del flujo libre al tráfico congestionado se conoce como colapso del tráfico. En la teoría del tráfico de Kerner tal interrupción del tráfico se explica por una transición de fase FL → FS. Esta explicación se basa en las mediciones disponibles, donde se puede observar que después de un colapso del tráfico en un cuello de botella, el frente anterior del tráfico congestionado se mantiene en el cuello de botella. Por lo tanto, el tráfico congestionado emergente después de un colapso del tráfico corresponde con la definición [FS] de la fase del tráfico "flujo sincronizado".
Transiciones de fase FL → FS espontáneas e inducidas
Kerner constata a partir de datos medidos en la práctica, que el flujo sincronizado del tráfico se puede formar espontáneamente del flujo libre (transición de fase FL → FS espontánea) o que puede ser inducido externamente (transición de fase FL → FS inducida). Una transición de fase FL → FS espontánea se caracteriza por la condición de que antes del colapso del tráfico existía flujo libre no sólo en el lugar del cuello de botella sino también en los trechos adyacentes, tanto en el frente anterior (a favor del flujo) como en el posterior (en contra del flujo). Esto implica que una transición de fase FL → FS espontánea se origina por la expansión de una perturbación interior del flujo libre en el cuello de botella. Por el contrario, una transición de fase FL → FS inducida se origina por la perturbación del flujo libre del tráfico surgido inicialmente en un lugar diferente de la ubicación del cuello de botella. Esto se asocia generalmente a una propagación del frente anterior de una región de flujo sincronizado o de congestionamiento ampliado móvil, es decir, a la propagación de un congestionamiento que ocurrió en otro lugar. Un ejemplo empírico de un colapso del tráfico inducido en un cuello de botella el cual conduce a un tráfico sincronizado, se muestra en la Figura 3: el flujo sincronizado, en la altura del kilómetro 19, emerge por la propagación del frente anterior de un congestionamiento ampliado móvil [CAM] que se originó en el kilómetro 23 y fue avanzando en contra del flujo. Cuando ese [CAM] pasó por el cuello de botella existente en el kilómetro 19, generó una fase [FS] en ese punto. Es importante observar que el [CAM] continuo avanzando en contra del flujo, pero terminó causando un congestionamiento [FS] en el cuello de botella del kilómetro 19 que permaneció igual después del paso del [CAM].
Explicación física del colapso del tráfico
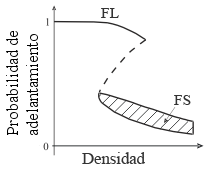
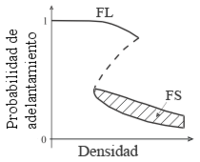 Figura 6: Explicación del colapso del tráfico mediante una función discontinua no linear del tipo Z de la probabilidad de éxito de adelantamiento en la teoría de las tres fases del tráfico de Kerner. La curva de puntos ilustra la probabilidad crítica de adelantamiento en función de la densidad de tráfico
Figura 6: Explicación del colapso del tráfico mediante una función discontinua no linear del tipo Z de la probabilidad de éxito de adelantamiento en la teoría de las tres fases del tráfico de Kerner. La curva de puntos ilustra la probabilidad crítica de adelantamiento en función de la densidad de tráficoKerner explica la naturaleza de las transiciones de fase FL → FS como una competencia espacio-temporal entre dos situaciones antagónicas que surgen cuando un vehículo se encuentra con otro delante más lento. En el primer caso, el vehículo de atrás acelera para adelantarse al del frente durante un cambio de carril. En el segundo caso, el vehículo de atrás desacelera regulando su velocidad con la del vehículo de adelante ("regulación de velocidad"). El adelantamiento favorece, evidentemente, la continuidad del flujo libre. Por el contrario, la "regulación de velocidad", que se producirá si el adelantamiento no fue posible, conduce al flujo sincronizado, dado que el problema provocado por el vehículo más lento se propaga para los vehículos que le siguen. Kerner afirma que la probabilidad de éxito de un adelantamiento es una función discontinua de la densidad de vehículos no linear del tipo Z (Figura 6): a una densidad de vehículos dada, la probabilidad de adelantamiento en el flujo libre es mucho mayor que en el flujo sincronizado. Es posible observar valores de densidad que pertenecen tanto a la fase [FL] como a la [FS], lo cual contradice las teorías clásicas que asocian cada valor de la densidad sólo a un estado de tráfico, o libre o congestionado.
Infinito número de valores de capacidad de autopista
Valores de capacidad mínimos y máximos
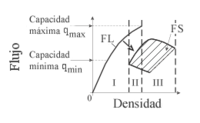 Figura 7: Representación gráfica de las capacidades de autopista máxima y mínima en la teoría de las tres fases del tráfico de Kerner
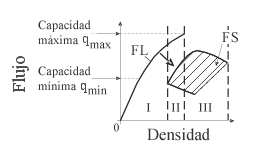
Figura 7: Representación gráfica de las capacidades de autopista máxima y mínima en la teoría de las tres fases del tráfico de KernerEl colapso del tráfico espontáneo, es decir, una transición de fase FL → FS espontánea, podría producirse en un amplio rango de valores de flujos de la fase [FL]. Kerner constata, a partir de datos medidos en la práctica, que debido a la posibilidad de colapsos del tráfico espontáneos o inducidos en un mismo cuello de botella hay un número infinito de valores de capacidad de autopista. Este número infinito de valores esta entre un mínimo de capacidad qmin y un máximo de capacidad qmax de la fase de flujo libre (Figura 7). En otras palabras, la comparación de ejemplos prácticos de la entrada progresiva de vehículos en una autopista, muestra que en un determinado día el colapso se produjo cuando el flujo alcanzó un cierto valor q1, mientras que en otro día éste sólo ocurrió cuando llegó a un valor mayor q2.
Valores de capacidad de autopista y meta-estabilidad del flujo libre
Pequeñas perturbaciones en la fase de flujo libre en el cuello de botella conducirán a una transición de fase FL → FS espontánea, en caso de que el caudal en el flujo libre se aproxime a la máxima capacidad qmax. Por el contrario, sólo perturbaciones muy grandes en la fase de flujo libre en el cuello de botella darán lugar a una transición de fase FL → FS espontánea, en caso de que el caudal se acerque a la capacidad mínima qmin. La probabilidad de una perturbación más pequeña en la fase de flujo libre es mucho mayor que la de una perturbación mayor. Por lo tanto, cuanto mayor sea el caudal en la fase de flujo libre en un cuello de botella, mayor es la probabilidad de una transición de fase FL → FS espontánea. Si el caudal en la fase de flujo libre es inferior a la capacidad mínima qmin, no habrá colapso del tráfico en el cuello de botella, es decir, la fase de flujo libre es estable. Teniendo en cuenta que la capacidad es igual al máximo valor de flujo que puede pasar en una sección de la autopista y que ese valor corresponde a qmax, el mayor valor que puede pasar en la fase de flujo libre, se llega a la conclusión de que en un mismo tramo de la autopista puede haber un infinito numero de valores de capacidad de autopista posibles. Esta es otra diferencia importante en comparación con las teorías anteriores que consideraban que un tramo de autopista tiene sólo un valor particular de capacidad. El número infinito de valores de capacidad de autopista en un cuello de botella se puede expresar mediante la meta-estabilidad del flujo libre en el caudal q por
 . Se define como meta-estabilidad del flujo libre a la tendencia que esa fase tiene de permanecer estable ante pequeñas perturbaciones, pero ante grandes perturbaciones se vuelve inestable aumentando la probabilidad de que ocurra una transición de fase [FL] → [FS].
. Se define como meta-estabilidad del flujo libre a la tendencia que esa fase tiene de permanecer estable ante pequeñas perturbaciones, pero ante grandes perturbaciones se vuelve inestable aumentando la probabilidad de que ocurra una transición de fase [FL] → [FS].Discusión sobre las definiciones de capacidad de autopista
El número infinito de capacidades de autopista en un cuello de botella en la teoría del tráfico de Kerner contradice fundamentalmente las teorías clásicas del tráfico y los métodos para la gestión y el control del tráfico, los cuales asumen que en cualquier instante de tiempo existe una capacidad de autopista particular. En cambio, en la teoría de Kerner en cualquier instante de tiempo hay un número infinito de capacidades de autopista, las cuales están dentro del rango de caudal antes mencionado entre la capacidad mínima qmin y la capacidad máxima qmax. Los valores de qmin y qmax pueden depender considerablemente de los parámetros del tráfico (porcentaje de vehículos largos, clima, características del cuello de botella, etc.) La Figura 7 resume esta cuestión del infinito número de valores de capacidad de autopista que se puede dar en un tramo determinado de la misma. Cualquier flujo perteneciente a la fase de flujo libre entre qmin y qmax está sujeto a ser degradado a la fase de flujo sincronizado. Es interesante observar que el conjunto de puntos pertenecientes a la región [FS] no forma más una línea como en la mayoría de las teorías anteriores, sino una zona (región rayada). Por lo tanto, pueden ocurrir para un mismo tramo, diferentes situaciones de flujos, dentro de la fase [FS], para un mismo valor de densidad. Por último, el gráfico nos muestra que se pueden diferenciar tres regiones de densidad. En la región I, de densidades menores, solamente se encuentran ejemplos de flujo libre. En la región II, de densidades intermedias, se observan tanto situaciones de flujo libre como de flujo sincronizado. En la región III, de densidades mayores, solamente ocurren casos de flujo sincronizado.
Congestionamiento ampliado móvil (CAM)
Un congestionamiento ampliado móvil será llamado "ampliado", si el ancho del congestionamiento móvil (en dirección del flujo) supera claramente el ancho de los frentes del embotellamiento. La velocidad media dentro de la fase de congestionamiento ampliado móvil es mucho menor que la velocidad media en la fase de flujo libre. En el frente anterior los vehículos podrían acelerar a la velocidad del flujo libre. En el frente posterior los vehículos provienen de la fase de flujo libre o de flujo sincronizado y deben reducir su velocidad. De acuerdo con la definición [CAM] el congestionamiento ampliado móvil mantiene su velocidad media del frente anterior vcam, incluso si el embotellamiento se propaga a través de otras fases del tráfico o cuellos de botella. El flujo es reducido fuertemente dentro de un congestionamiento ampliado móvil.
Parámetros característicos del congestionamiento ampliado móvil
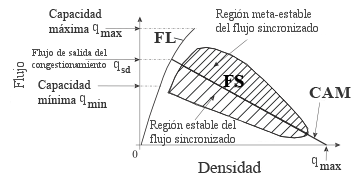
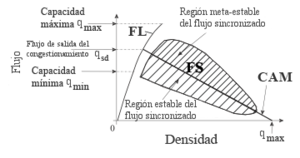 Figura 8: Las tres fases del tráfico de Kerner en el plano flujo-densidad
Figura 8: Las tres fases del tráfico de Kerner en el plano flujo-densidadResultados empíricos muestran que algunos rasgos característicos del congestionamiento ampliado móvil son independientes del volumen de tráfico y de las características del cuello de botella (por ejemplo, donde y cuando a ocurrido el embotellamiento). Sin embargo, estas características dependen de condiciones climáticas, condiciones de las autopistas, tecnología de los vehículos, porcentaje de vehículos largos, etc. La velocidad del frente anterior de un congestionamiento ampliado móvil vcam (en dirección contraria al flujo) es un parámetro característico, así como el frente anterior del flujo de salida del congestionamiento qsd (con flujo libre en este lugar, ver Figura 8). Esto significa, que varios congestionamientos ampliados móviles tienen características similares en condiciones similares. Estos parámetros son relativamente predecibles debido a estas razones. El movimiento del frente anterior del congestionamiento puede ser ilustrado en el plano flujo-densidad por una línea, la cual se llama "Línea CAM" (Línea CAM en la Figura 8). La pendiente de la Línea CAM es la velocidad del frente anterior del congestionamiento vcam, dado que la coordenada de flujo cero corresponde a la máxima densidad de vehículos kmax que puede ocurrir dentro del embotellamiento, dentro de la fase [CAM].
Capacidad mínima de autopista y la salida del congestionamiento ampliado móvil
Kerner destaca que la capacidad mínima qmin y la salida de un congestionamiento ampliado móvil qsd describen dos características cualitativamente diferentes del flujo libre: la capacidad mínima qmin caracteriza una transición de fase FL → FS en un cuello de botella, es decir, un colapso del tráfico. La salida de un congestionamiento ampliado móvil qsd caracteriza las condiciones de la existencia del embotellamiento, es decir, la fase del tráfico CAM. Dependiendo de los parámetros de tráfico como el clima, el porcentaje de vehículos largos, etc., y las características del cuello de botella, donde la transición de fase FL → FS puede producirse, la capacidad mínima qmin podría ser menor (como en la Figura 8), o mayor a la salida de un embotellamiento qsd.
Fase de flujo sincronizado (FS)
En contraste con el congestionamiento ampliado móvil, en la fase de flujo sincronizado, tanto el caudal como la velocidad del vehículo pueden variar considerablemente. El frente anterior del flujo sincronizado esta con frecuencia fijado espacialmente (véase la definición [FS]) al cuello de botella en un determinado lugar de la autopista. El flujo en esta fase puede permanecer similar al del flujo libre, incluso si las velocidades de los vehículos son muy bajas. Debido a que la fase de flujo sincronizado no tiene los rasgos característicos de la fase de congestionamiento ampliado móvil CAM, la teoría de las tres fases del tráfico de Kerner asume que los estados homogéneos hipotéticos del flujo sincronizado cubren una región bidimensional en el plano flujo-densidad (línea de puntos las regiones en la figura 8).
Transición de fase FS → CAM
Los congestionamientos ampliados móviles no surgen espontáneamente en tramos de autopista que presentan una fase de flujo libre, sino solamente en lugares donde el tráfico ya está en fase de flujo sincronizado.
"El embotellamiento no surge de la nada" - transiciones de fase FL → FS → CAM
Por lo tanto, el "embotellamiento no surge de la nada", no existe la transición de fase [FL] → [CAM], sino la transición de fase [FS] → [CAM]. En consecuencia, la transición de la fase de flujo libre a la de congestionamiento ampliado móvil tiene que pasar primero por una fase intermedia de flujo sincronizado, formando una cascada de transición [FL] → [FS] → [CAM]. Inicialmente surge una región [FS] dentro de una región [FL]. Como ya se mencionó este fenómeno suele producirse en un tramo del tipo cuello de botella. Dentro de esa fase de flujo sincronizado se produce, por algún motivo, una "auto-compresión", en la cual aumenta la densidad de vehículos, mientras que disminuye la velocidad de estos. Esta auto-compresión se conoce como "efecto de pliegue". En estas regiones de "pliegue" del flujo sincronizado surgen congestionamientos estrechos móviles [CEM]. Cuando estos congestionamientos estrechos móviles crecen, estos se transforman en congestionamientos ampliados móviles. Kerner constata que la frecuencia de la aparición de congestionamientos ampliados móviles aumenta si la densidad de vehículos en la fase de flujo sincronizado aumenta. Estos congestionamientos ampliados móviles se mueven en contra del flujo de la fase previa, incluso si se desplazan a través de regiones de flujo sincronizado u otros cuellos de botella.
Física de la transición de fase FS → CAM
Para ilustrar mejor las transiciones de fase FS → CAM observemos la Figura 8. En la Figura 8, la Línea CAM divide la región [FS] en dos partes. Los puntos [FS] encima de la Línea CAM presentan la característica de meta-estabilidad, es decir, perturbaciones que se producen en el tráfico pudiendo provocar una fase [CAM], dependiendo de la densidad del [FS] y de la intensidad de la perturbación. Los puntos [FS] por abajo de la Línea CAM son estables, lo que significa que en estas condiciones, no se producen las transiciones de fase [FS] → [CAM].
Patrones de tráfico de FS y CAM
Se pueden observar patrones de congestionamiento muy complejos causados por las transiciones de fase FL → FS y FS → CAM.
Clasificación de los patrones de tráfico del flujo sincronizado (PFS)
Cabe señalar que no se puede encontrar un grupo de vehículos sujetos únicamente a la fase [CAM], el congestionamiento ampliado móvil no es una propiedad de un grupo de vehículos, sino una onda que pasa a través de un grupo de vehículos sujetos a la fase [FS]. Un grupo de vehículos, el cual está sujeto únicamente a la fase [FS], establece un Patrón de Flujo Sincronizado (PFS). Si el PFS tiene un frente anterior fijo que no crece en contra del flujo y un frente posterior móvil discontinuo es llamado Patrón de Flujo Sincronizado Localizado (PFSL). Con frecuencia el frente posterior de un PFS se propaga en contra del flujo. Si esto ocurre mientras el frente anterior se mantiene fijo en la ubicación del cuello de botella y el ancho del PFS se incrementa, el PFS se denomina Patrón de Flujo Sincronizado Creciente (PFSC). Es posible que ambos frentes, anterior y posterior, se propaguen en contra del flujo. En ese caso, el frente anterior ya no se encuentra fijo en el cuello de botella. Este patrón se denomina Patrón de Flujo Sincronizado Móvil (PFSM).
"Efecto captura" del patrón de trafico de FS en un cuello de botella
Es importante aclarar las diferencias entre el congestionamiento ampliado móvil y el patrón de flujo sincronizado, en particular el PFSM. La diferencia entre el PFS y el congestionamiento ampliado móvil se hace visible cuando el PFSC o el PFSM alcanza un frente posterior de un cuello de botella, en ese caso se produce el llamado "efecto de captura". En el caso del PFSM, es como si el congestionamiento fuese capturado en el cuello de botella con el cual se encontró mientras se movía en dirección contraria a la del flujo. El PFSM desaparece y en su lugar surge un PFSC cuyo frente permanece fijo en el cuello de botella encontrado en el camino. Un congestionamiento ampliado móvil no será capturado en un cuello de botella, pasará y se moverá siempre en contra del flujo. En contraste con el congestionamiento ampliado móvil, el flujo sincronizado, incluso como un PFSM no tiene parámetros característicos. A modo de ejemplo, la velocidad del frente anterior del PFSM podría variar significativamente a lo largo del tiempo a diferencia de lo que ocurre con el [CAM], y puede ser diferente para diferentes PFSMs. Estas características de los PFSs y los congestionamientos ampliados móviles son consecuencias de las definiciones de fase [FS] y [CAM].
Patrón de tráfico congestionado general (PG)
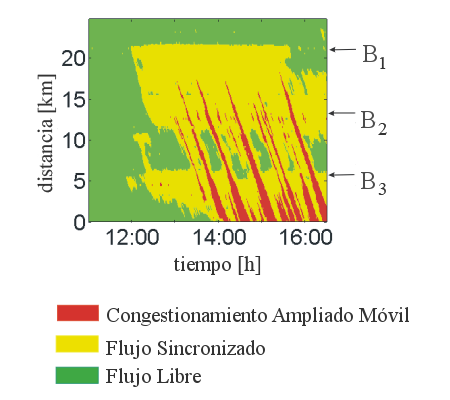
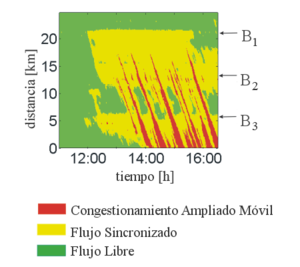 Figura 9: Patrones de tráfico congestionado General Expandido (PGE) medidos en tres cuellos de botella B1, B2, B3
Figura 9: Patrones de tráfico congestionado General Expandido (PGE) medidos en tres cuellos de botella B1, B2, B3Si dentro de un grupo de vehículos se observan dos fases [FS] y [CAM], estamos en presencia de un Patrón de tráfico congestionado General (PG) En muchas autopistas, los cuellos de botella están tan juntos que es común que un congestionamiento se extienda sobre dos o más cuellos de botella consecutivos. Tal configuración representa un patrón llamado Patrón Expandido (PE). Cuando este patrón sólo contiene flujo sincronizado, se llama Patrón de Flujo Sincronizado Expandido (PFSE). Pero a menudo, la fase [CAM] también se encuentra en el interior de un PE, en cuyo caso se le llama Patrón de tráfico congestionado General Expandido (PGE) (ver Figura 9).
Aplicaciones de la teoría de las tres fases
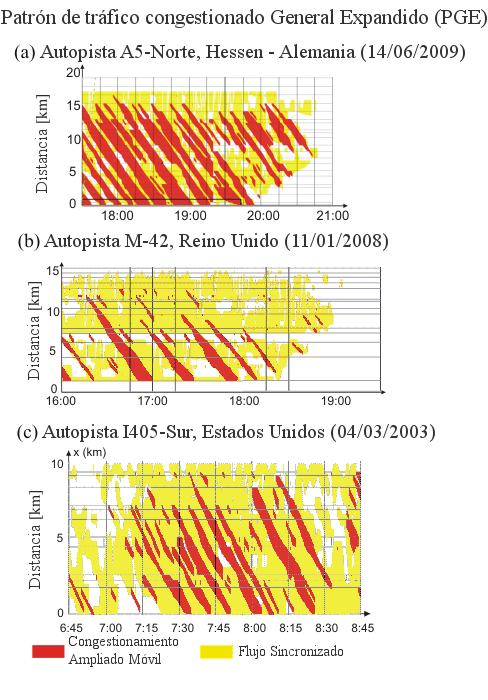
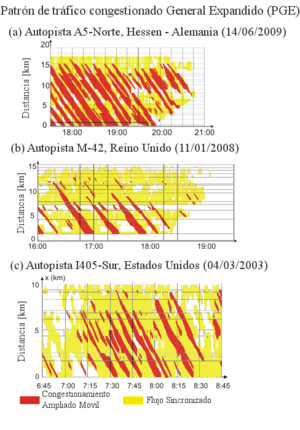 Figura 10: Patrones de tráfico mostrados por la aplicación ASDA/FOTO en tres países distintos
Figura 10: Patrones de tráfico mostrados por la aplicación ASDA/FOTO en tres países distintosUna de las aplicaciones de la teoría de las tres fases del tráfico de Kerner son los métodos ASDA/FOTO (Automatische StauDynamikAnalyse (seguimiento automático de congestionamientos ampliados móviles) y Forecasting Of Traffic Objects (predicción de objetos de tráfico)). ASDA/FOTO es una herramienta de software capaz de procesar grandes volúmenes de datos del tráfico de forma rápida y eficiente en redes de autopistas (véanse los ejemplos de tres países, Figura 10). ASDA/FOTO trabaja en un sistema de gestión del tráfico en línea basado en datos del tráfico medidos. Reconocimiento, seguimiento y predicción de [FS] y [CAM] se realizan utilizando las características de la teoría de las tres fases del tráfico de Kerner. Otras aplicaciones de la teoría se observan en el desarrollo de modelos de simulación de tráfico, sistema de medición de rampa (ANCONA), control del tráfico colectivo, asistencia del tráfico y detección del estado del tráfico, como se describe en los libros de Kerner.
Bibliografía
- B.S. Kerner, Introduction to Modern Traffic Flow Theory and Control: The Long Road to Three-Phase Traffic Theory, Springer, Berlin, New York 2009
- B.S. Kerner, The Physics of Traffic, Springer, Berlin, New York 2004
Enlaces externos
- D. Helbing, "Criticism of three-phase traffic theory". Transportation Research Part B: Methodische 43 (7): 784-797. Doi: 10.1016/j.trb.2009.02.004.
- H. Rehborn, S. Klenov, "Traffic Prediction of Congested Patterns", In: R. Meyers (Ed.): Encyclopedia of Complexity and Systems Science, Springer New York, 2009.
- J. Palmer, H. Rehborn, "ASDA/FOTO auf Basis der Kerner'schen Drei-Phasen Verkehrstheorie in Nordrhein-Westfalen beim WDR". Straßenverkehrstechnik 08/2008, pp. 463-470.
- H. Rehborn, J. Palmer, "Using ASDA and FOTO to generate RDS/TMC traffic messages", Traffic Engineering and Control, July 2008, pp.261-266.
- L. C. Davis, Eine Buch-Besprechung des Buches von B.S. Kerner "Introduction to Modern Traffic Flow Theory and Control" in Physics Today , Vol. 63, Issue 3 (2010), p. 53
- H. Hartenstein, Eine Buch-Besprechung des Buches von B.S. Kerner "Introduction to Modern Traffic Flow Theory and Control" in IEEE Vehicular Technology Magazine, Vol. 5, Issue 3 (2010), p. 91
Referencias
- ↑ a b c Boris S. Kerner, "Experimental Features of Self-Organization in Traffic Flow", Physical Review Letters, 81, 3797-3400 (1998)
- ↑ a b c Boris S. Kerner, "The physics of traffic", Physics World Magazine 12, 25-30 (August 1999)
- ↑ a b c Boris S. Kerner, "Congested Traffic Flow: Observations and Theory", Transportation Research Record, Vol. 1678, pp. 160-167 (1999)
Véase también
Categorías:- Transporte por carretera
- Ingeniería vial


Wikimedia foundation. 2010.