- Mecatrónica
-
Mecatrónica
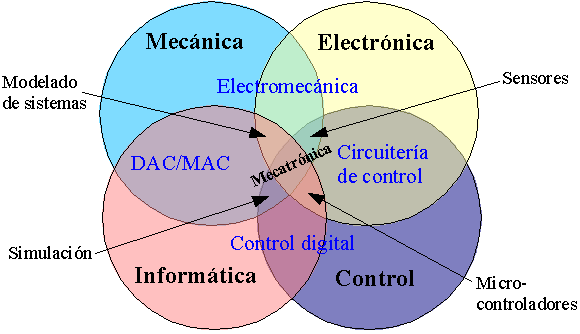
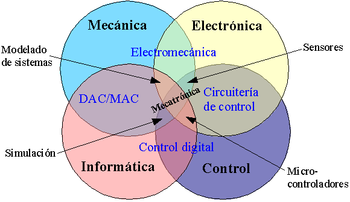 Ramas de la Ingeniería que constituyen a la mecatrónica.
Ramas de la Ingeniería que constituyen a la mecatrónica.
La mecatrónica surge de la combinación sinérgica de distintas ramas de la ingeniería, entre las que destacan: la mecánica de precisión, la electrónica, la informática y los sistemas de control. Su principal propósito es el análisis y diseño de productos y de procesos de manufactura automatizados.
Contenido
Descripción
El término "Mecatrónica" fue introducido por primera vez en 1969 por el ingeniero Tetsuro Mori, trabajador de la empresa japonesa Yaskawa. En un principio se definió como la integración de la mecánica y la electrónica en una máquina o producto, pero luego se consolidó como una especialidad de la ingeniería e incorporó otros elementos como los sistemas de computación, los desarrollos de la microelectrónica, la inteligencia artificial, la teoría de control y otros relacionados con la informática, estabilidad y alcanzabilidad. Teniendo como objetivo la optimización de los elementos industriales a través de la optimización de cada uno de sus subprocesos con nuevas herramientas sinérgicas.
La definición de mecatrónica propuesta por J.A. Rietdijk: "Mecatrónica es la combinación sinérgica de la ingeniería mecánica de precisión, de la electrónica, del control automático y de los sistemas para el diseño de productos y procesos para una producción con mayor plusvalía y calidad".
Antecedentes
La Mecatrónica tiene como antecedentes inmediatos a la investigación en el área de Cibernética realizada en 1936 por Turing y en 1948 por Wiener y Morthy, las máquinas de control numérico, desarrolladas inicialmente en 1946 por Devol, los manipuladores, ya sean teleoperados, en 1951 por Goertz, o robotizados, en 1954 por Devol, y los autómatas programables, desarrollados por Bedford Associates en 1968.
En 1969 la empresa japonesa Yaskawa Electric Co. acuña el término Mecatrónica, recibiendo en 1971 el derecho de marca. En 1982 Yaskawa permite el libre uso del término.
Actualmente existen diversas definiciones de Mecatrónica, dependiendo del área de interés del proponente. En particular, la UNESCO define a la Mecatrónica como:
- "La integración sinérgica de la ingeniería mecánica con la electrónica y el control inteligente por computadora en el diseño y manufactura de productos y procesos".
Sin embargo, una manera más interesante de definir la Mecatrónica es posible por:
- "Diseño y construcción de sistemas mecánicos inteligentes".
Un sistema mecatrónico se compone principalmente de mecanismos, actuadores, control (inteligente) y sensores. Tradicionalmente la Mecánica se ha ocupado solo de los mecanismos y los actuadores, y opcionalmente puede incorporar control. La Mecatrónica integra obligatoriamente el control en lazo cerrado y por lo tanto también a los sensores.
Sistema Mecatrónico
Un sistema mecatrónico es aquel sistema digital que recoge señales, las procesa y emite una respuesta por medio de actuadores, generando movimientos o acciones sobre el sistema en el que se va a actuar: Los sistemas mecánicos están integrados por sensores, microprocesadores y controladores. Los robots, las máquinas controladas digitalmente, los vehículos guiados automáticamente, etc. se deben considerar como sistemas mecatrónicos
Líneas de investigación
La investigación en el área de Mecatrónica es muy variada y una división que se propone es: análisis, detectar los problemas de los componentes analógicos y digitales , encontrar una solución al mismo, comportamiento de los sistemas.
Componentes
Mecanismos
En el área de mecanismos, los principales problemas son reducción de complejidad, eliminación de mecanismos y síntesis de mecanismos mecatrónicos.
La reducción de la complejidad se refiere a reducir el número de elementos del mecanismo, mediante el uso de control inteligente. La eliminación del mecanismo implica el uso directo de actuadores y de controles más sofisticados. La síntesis de mecanismos mecatrónicos consiste en utilizar actuadores directamente en el mecanismo para mejorar su movimiento; un ejemplo de síntesis es el desarrollo de rodamientos con actuación magnética para eliminar la fricción. Se caracteriza por una mejor caracterización del mecanismo y el diseño por computadora.
Actuadores
Todo mecanismo requiere de una fuente de potencia para operar. Inicialmente esta fuente de potencia fue de origen animal, posteriormente se aprovechó la fuerza generada por el flujo de aire o agua, pasando luego a la generación de potencia con vapor, por combustión interna y actualmente con electricidad. Si esta fuente de potencia es modulable o controlable, se tiene un actuador. Los principales desarrollos de los actuadores en la Mecatrónica son: manejo directo, eliminando mecanismos, utilizando actuadores electromagnéticos, piezoeléctricos y ultrasónicos.También deben considerarse los actuadores neumáticos u oleo-hidráulicos. Un tipo de actuadores muy utilizados son los motores eléctricos; se han desarrollado investigaciones en nuevos modelos matemáticos, nuevos tipos de manejadores y en nuevos tipos de control. Un tipo de actuador que se ha utilizado mucho en nanomaquinaria son los actuadores electrostáticos.
Controles
Un área muy desarrollada en la Mecatrónica es el control. Se tienen dos tendencias importantes: el uso de las técnicas más modernas de la teoría de control automático y el desarrollo de controles inteligentes, que busca mejorar la percepción del medio ambiente y obtener una mejor autonomía. Algunos de los avances más importantes en la rama del control automático son: redes neuronales, modos deslizantes, control de sistemas a eventos discretos, control adaptable, lógica difusa y control robusto.
Sensores
Los sensores son dispositivos que permiten medir el estado del mecanismo o del medio ambiente. La incorporación de sensores a los mecanismos es el resultado de utilizar controles de lazo cerrado. Un ejemplo muy desarrollado es el uso de la visión artificial, la cual se usa para determinar la posición y la orientación del mecanismo, del ambiente o de las herramientas, sin embargo, no siempre es posible medir directamente alguna variable se estima su valor por medio de observadores del estado y filtros. Por otro lado, se tiene la fusión de sensores. Un problema que se ha manejado recientemente es el desarrollo de referenciales \emph{fijos} para determinar la posición y orientación en problemas de navegación, siendo resuelto por medio de sistemas de posicionamiento global (GPS, por sus siglas en inglés).
Análisis y modelado
Por análisis se entiende la obtención de una descripción o modelo de los sistemas por métodos matemáticos y gráficos. El principal problema radica en que muchos sistemas de control no se describen con modelos continuos, ya sea en el estado o en el tiempo; mientras los sistemas mecánicos son modelos continuos. Este problema ha provocado el uso de nuevas técnicas de modelado, tales como: redes neuronales, redes de Petri, lógica difusa, onduletas, memorias asociativas, agentes cooperativos, modelos algorítmicos y modelos lingüísticos.
Los modelos son necesarios para poder realizar síntesis de dispositivos mecatrónicos y optimización de procesos.
Aplicaciones
En cuanto a aplicaciones, los rubros más importantes son robótica, sistemas de transporte, sistemas de manufactura, máquinas de control numérico, nanomáquinas y biomecatrónica.
La robótica es la parte de la técnica de diseño y construcción de autómatas flexibles y reprogramables, capaces de realizar diversas funciones. Es el nivel de automatización más flexible y en mucho indica las tendencias futuras del resto de la mecatrónica. Las líneas de investigación más desarrolladas son: síntesis de manipuladores y herramientas, manipuladores de cadena cinemática cerradas, robots autónomos, robots cooperativos, control y teleoperación asincrónicas (por medio de conexiones TCP/IP), estimación del ambiente, comportamiento inteligente, interfaces hápticas, navegación y locomoción.
La aplicación de la Mecatrónica en el transporte se desarrolla en el diseño de mecanismos activos (ejemplo: suspensiones activas), control de vibraciones, estabilización de mecanismos y navegación autónoma.
En la manufactura, la Mecatrónica se ha servido de los modelos de sistemas a eventos discretos, y los ha aplicado para el diseño óptimo de líneas de producción así como la optimización de procesos ya existente. También ha ayudado a automatizar las líneas de producción y generar el concepto de manufactura flexible.
Antecedentes de la Mecatrónica son las máquinas de control numérico. En este tema los desarrollos más recientes son: análisis, detección y control de vibraciones, y temperatura, en las herramientas de corte, diagnóstico de las herramientas de corte y prototipaje rápido, electroerosionado y síntesis por láser.
Las nanomáquinas son un área que se han beneficiado de los desarrollos de la Mecatrónica. Un ejemplo muy evidente es el desarrollo del disco duro. Las líneas de investigación más manejadas son: micromanejo, microactuadores y micromaquinado.
La biomecatrónica es la aplicación de la mecatrónica para resolver problemas de sistemas biológicos, en particular el desarrollo de nuevos tipos de prótesis, simuladores quirúrgicos, control de posición de instrumental médico (por ejemplo catéteres), sillas de ruedas y teleoperación quirúrgica.
Véase también
 Portal:Ingeniería Contenido relacionado con Ingeniería.
Portal:Ingeniería Contenido relacionado con Ingeniería.- Mecánica de Precisión.
- Cibernética.
- Electromecánica.
Categorías: Electrónica | Mecánica | Ingeniería
Wikimedia foundation. 2010.