- La cirugía robótica
-
Contenido
Cirugía robótica
La cirugía robótica es una técnica con la cual se pueden realizar procedimientos quirúrgicos con la mas avanzada tecnología disponible hoy en día. El uso de esta tecnología le permite al cirujano realizar el procedimiento de una forma mas precisa.
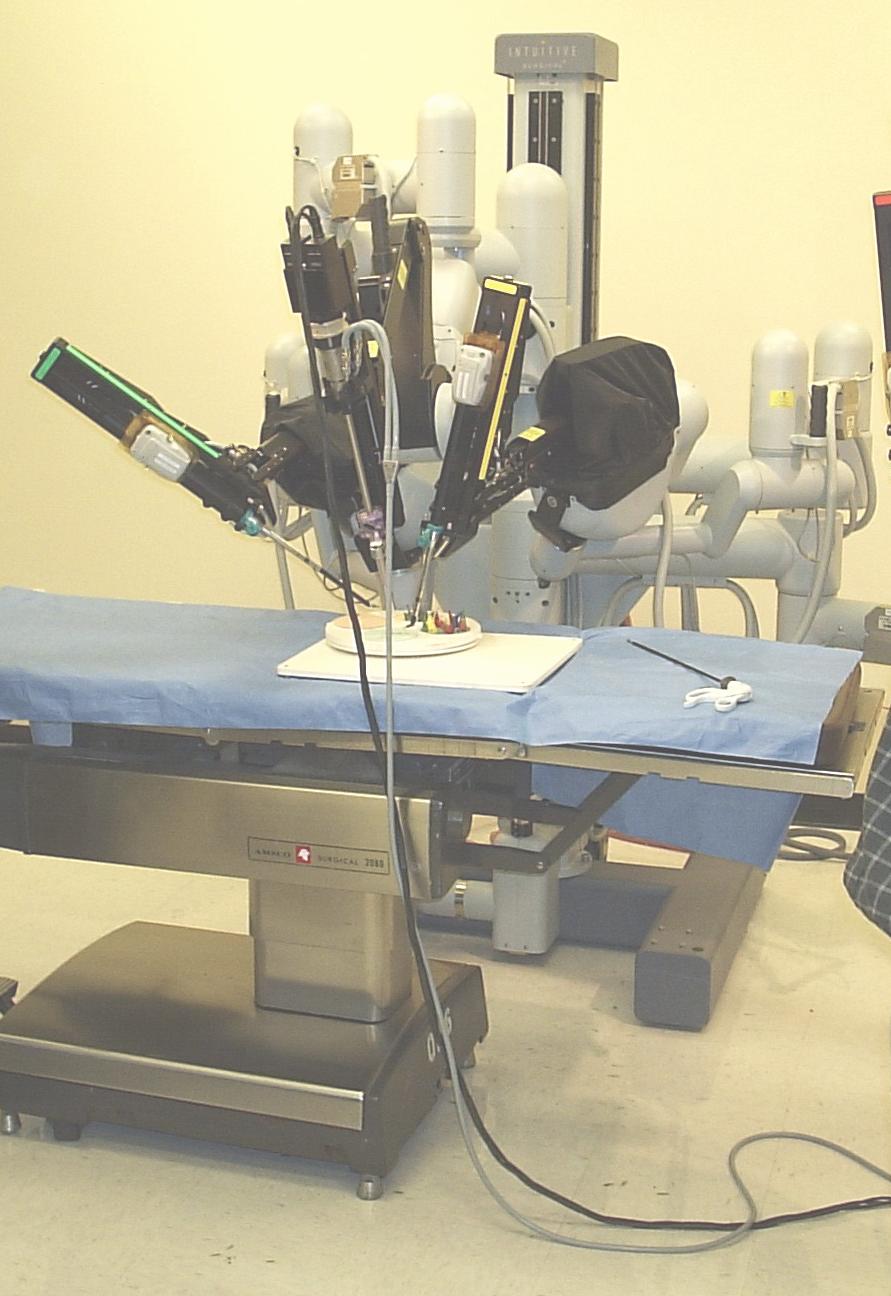
 Laproscopic Surgery Robot
Laproscopic Surgery Robot
Antecedentes historicos
El primer robot controlador realimentado fue el regulador de Watt, inventado en 1788 por el ingeniero británico James Watt. Este dispositivo constaba de dos bolas metálicas unidas al eje motorde una máquina de vapor y conectadas con una válvula que regulaba el flujo de vapor. A medida que aumentaba la velocidad de la máquina de vapor, las bolas se alejaban del eje debido a la fuerzacentrífuga, con lo que cerraban la válvula. Esto hacía que disminuyera el flujo de vapor a la máquina y por tanto la velocidad.
El control por realimentación, el desarrollo de herramientasespecializadas y la división del trabajo en tareas más pequeñas que pudieran realizar obreros o máquinas fueron ingredientes esenciales en la automatizaciónde las fábricas en el siglo XVIII. A medida que mejoraba la tecnología se desarrollaron máquinas especializadas para tareas como poner tapones a las botellas o verter caucholíquido en moldes para neumáticos. Sin embargo, ninguna de estas máquinas tenía la versatilidad del brazo humano, y no podía alcanzar objetos alejados y colocarlos en la posición deseada.
El desarrollo del brazo artificial multiarticulado, o manipulador, llevó al moderno robot. El inventor estadounidense George Devol desarrolló en 1954 un brazo primitivo que se podía programar para realizar tareas específicas. En 1975, el ingeniero mecánico estadounidense Victor Scheinman, cuando estudiaba la carrera en la Universidad de Stanford, en California, desarrolló un manipulador polivalente realmente flexible conocido como Brazo Manipulador Universal Programable (PUMA, siglas en inglés). El PUMA era capaz de mover un objeto y colocarlo en cualquier orientación en un lugar deseado que estuviera a su alcance. El concepto básico multiarticulado del PUMA es la base de la mayoría de los robots actuales.
Ventajas
· Mejor visión. La imagen del robot es mas nítida.
· Visión en tercera dimensión. El uso del robot le permite al cirujano ver en tercera dimensión en vez de en segunda dimensión
· Mayor precisión. El robot elimina el temblor natural y da la capacidad de miniaturizar los movimientos del cirujano.
· Mayor rango de movimientos. Facilita las técnicas quirúrgicas avanzadas como el suturar.
· Acceso a lugares difíciles. Algunos sitios del cuerpo, como la pelvis, son de difícil acceso por cirugía abierta o laparoscopica.
Desventajas
· Costo. Actualmente es el mayor impedimento para su uso mas frecuente. El uso de esta tecnología no siempre es cubierta por los seguros de gastos médicos.
· Selección de casos. No todos los casos son apropiados para el uso del robot y en ocasiones la cirugía pudiera hacerse mas compleja.
Véase también
http://es.wikipedia.org/wiki/Cirug%C3%ADa
http://es.wikipedia.org/wiki/Robot
Referencias
Wikimedia foundation. 2010.