- Lunar Roving Vehicle
-
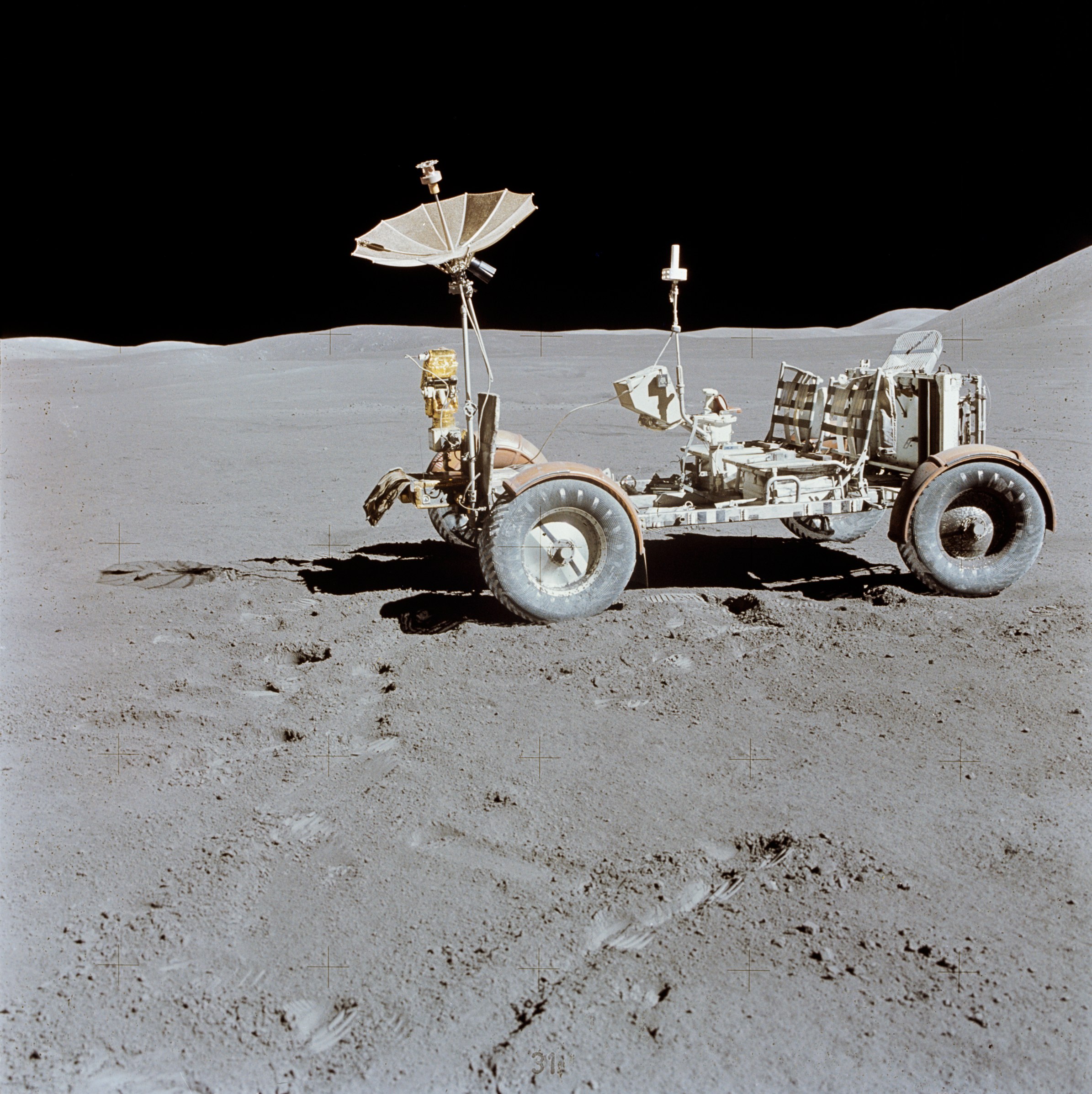
 El Rover lunar del Apolo 15.
El Rover lunar del Apolo 15.
El Lunar Roving Vehicle (también llamado LRV, Rover lunar o molabs) era un vehículo todoterreno empleado por los astronautas de las misiones Apolo 15, 16 y 17 en sus desplazamientos por la superficie lunar.
Contenido
Características
El L.R.V. llegó a la Luna empaquetado y con unas dimensiones de 90 x 150 x 170 centímetros, introducido en un compartimento del módulo de descenso LEM. La autonomía del vehículo quedó establecida en 78 horas de funcionamiento durante el día lunar. Los tres vehículos L.R.V. fueron construidos por la empresa norteamericana Boeing, con apoyo de la Delco Electronics de General Motors.

Componentes
Se compone de un chasis de aluminio con cuatro ruedas (no neumáticas, sino de malla de acero) y dos asientos, que una vez desplegado totalmente tiene unas dimensiones totales de 3,10 m de longitud, 1,80 m de anchura y 181 kg en vacío incluyendo el dispositivo de fijación y despliegue. El peso en carga es de 621 kg.
El chasis estaba formado por 3 partes: la delantera que contenía las baterías, la unidad de proceso de información y la unidad direccional del sistema de navegación, así como el control electrónico de marcha y dirección.
La parte central soportaba los asientos de los astronautas, la consola de control y la palanca de dirección situada entre ambos asientos. La parte posterior servía para el transporte del equipo científico.
El chasis se encontraba a una altura de 35 centímetros sobre el suelo, e iba sujeto por cuatro ruedas amortiguadas por un sistema de barras de torsión, con un diámetro de 81,8 centímetros cada una, asidas por un disco de aluminio y titanio y con una anchura de 23 centímetros realizadas con un entretejido a base de cuerdas de piano. Cada rueda tenía su propio motor eléctrico, alimentado por dos baterías de 36 voltios, además de una de reserva y se había estimado su vida útil en 75.000 revoluciones, es decir unos 180 km. Cada una llevaba un sistema de mecanismo que permitía su desengrane del motor para que pudiese seguir girando si éste fallaba, permitiendo al L.R.V. desplazarse a velocidad lenta con sólo 2 ruedas motrices.
La velocidad que alcanzaba era de unos 3-4 kilómetros hora, y la máxima de 14, y en total realizaron 90,8 kilómetros por la superficie lunar, sin alejarse nunca más de 9,6 kilómetros del módulo, pues si el vehículo se averiaba era la distancia de seguridad máxima que podrían recorrer a pie hasta la nave.
Además de transportar a dos astronautas, también transportaba antenas de bajo alcance, repetidores de las comunicaciones radio en directo con la Tierra, tomavistas de 16 milímetros con sus respectivos cargadores, telecámaras, fotocámara de 70 milímetros, perforadora del suelo, pinzas para recoger muestras, magnetómetro, herramientas, repuestos y casettes bajo los asientos.
El sistema de navegación debía permitir a los astronautas el regreso al módulo lunar (L.M.) y se basaba en un sistema de movimiento por estima a partir de un punto conocido que determinaba constantemente la distancia recorrida y la dirección.
Constaba de un giroscopio direccional que suministraba información constante sobre la dirección de la marcha, odómetros en cada una de las ruedas que determinaban la velocidad y distancia recorrida, y una unidad procesadora que calculaba así la distancia recorrida. Un indicador de posición señalaba la dirección del vehículo, orientación, distancia total recorrida y distancia al módulo lunar.
La precisión de estos sistemas permitieron hacer regresar al vehículo a menos de 100 m de distancia del módulo lunar después de recorrer 32 km, lo cual bastaba para que quedase situado en el campo visual de los tripulantes.
Enlaces externos
 Wikimedia Commons alberga contenido multimedia sobre Lunar Roving Vehicle. Commons
Wikimedia Commons alberga contenido multimedia sobre Lunar Roving Vehicle. Commons- Apollo Lunar Roving Vehicle Documentation (NASA) Documentación sobre el vehículo lunar.
Wikimedia foundation. 2010.