- Espacio de estados
-
Espacio de estados
En ingeniería de control, una representación de espacios de estados es un modelo matemático de un sistema físico descrito mediante un conjunto de entradas, salidas y variables de estado relacionadas por ecuaciones diferenciales de primer orden que se combinan en una ecuación diferencial matricial de primer orden. Para prescindir del número de entradas, salidas y estados, las variables son expresadas como vectores y las ecuaciones algebraicas se escriben en forma matricial (esto último sólo puede hacerse cuando el sistema dinámico es lineal e invariante en el tiempo). La representación de espacios de estado (también conocida como aproximación en el dominio del tiempo) provee un modo compacto y conveniente de modelar y analizar sistemas con múltiples entradas y salidas. Con p entradas y q salidas, tendríamos que escribir
 veces la transformada de Laplace para procesar toda la información del sistema. A diferencia de la aproximación en el dominio de la frecuencia, el uso de la representación de espacios de estado no está limitada a sistemas con componentes lineales ni con condiciones iniciales iguales a cero. El espacio de estado se refiere al espacio de n dimensiones cuyos ejes coordenados están formados por variables de estados. El estado del sistema puede ser representado como un vector dentro de ese espacio.
veces la transformada de Laplace para procesar toda la información del sistema. A diferencia de la aproximación en el dominio de la frecuencia, el uso de la representación de espacios de estado no está limitada a sistemas con componentes lineales ni con condiciones iniciales iguales a cero. El espacio de estado se refiere al espacio de n dimensiones cuyos ejes coordenados están formados por variables de estados. El estado del sistema puede ser representado como un vector dentro de ese espacio.Contenido
Variables de estado
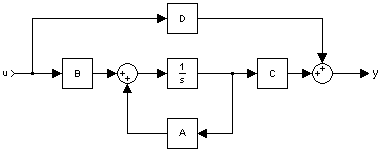 Modelo de espacios de estado típico
Modelo de espacios de estado típicoLas 'variables de estado son el conjunto más pequeño de variables que pueden representar al sistema dinámico completo en un tiempo cualquiera. Las variables de estado deben ser linealmente independientes; una variable de estado no puede ser una combinación lineal de otras variables de estado. El número mínimo de variables de estado necesarias para representar un sistema dado es n, es normalmente igual al orden de la ecuación diferencial que define al sistema. Si el sistema es representado en forma de función de transferencia, el número mínimo de variables de estado es igual al orden del denominador de la función transferencia después de haber sido reducido a una fracción propia. Cabe destacar que al convertir una representación de espacios de estados a una forma de función transferencia podría perderse alguna información interna sobre el sistema, indicando que dicho sistema es estable, cuando la representación de espacios de estados indica que es inestable en ciertos puntos. En circuitos eléctricos, el número de variables de estados es a menudo, pero no siempre, igual al número de elementos que almacenan energía en los circuitos, como capacitores e inductores.
Sistemas lineales
Una forma general de representación de espacios de estado de un sistema linear con p entradas, q salidas y n variables de estado se escribe de la siguiente forma:
donde
 ;
;  ;
;  ;
;![\operatorname{dim}[A(\cdot)] = n \times n](/pictures/eswiki/100/d67f69962a6411d08f1ba642d8c75617.png) ,
,![\operatorname{dim}[B(\cdot)] = n \times p](/pictures/eswiki/97/a4d9e024860226d6ad283d1d217f1c31.png) ,
,![\operatorname{dim}[C(\cdot)] = q \times n](/pictures/eswiki/52/452963fb0f31641c763dab57d77f6d15.png) ,
,![\operatorname{dim}[D(\cdot)] = q \times p](/pictures/eswiki/53/5b6e715515525947881d6fb6ea56fb15.png) ,
, .
.
 es llamado vector de estados,
es llamado vector de estados,  es llamado vector de salida,
es llamado vector de salida,  es llamado vector de entradas (o control),
es llamado vector de entradas (o control),  es la matriz de estados,
es la matriz de estados,  es la matriz de entrada,
es la matriz de entrada,  es la matriz de salida, y
es la matriz de salida, y  es la matriz de transmisión directa. Por simplicidad, normalmente se toma como la matriz cero, p. ej.: se elije que el sistema no tenga transmisión. Nótese que en esta formulación general se supone que todas las matrices son variantes en el tiempo, p. ej.: algunos o todos sus elementos pueden depender del tiempo. La variable temporal t puede ser una "contínua" (p. ej.:
es la matriz de transmisión directa. Por simplicidad, normalmente se toma como la matriz cero, p. ej.: se elije que el sistema no tenga transmisión. Nótese que en esta formulación general se supone que todas las matrices son variantes en el tiempo, p. ej.: algunos o todos sus elementos pueden depender del tiempo. La variable temporal t puede ser una "contínua" (p. ej.:  ) o una discreta (p. ej.:
) o una discreta (p. ej.: ): en éste último caso la variable temporal es generalmente indicada como k. Dependiendo de las consideraciones tomadas, la representación del modelo de espacios de estado puede tomar las siguientes formas:
): en éste último caso la variable temporal es generalmente indicada como k. Dependiendo de las consideraciones tomadas, la representación del modelo de espacios de estado puede tomar las siguientes formas:Tipo de sistema Modelo de espacio de estados Contínuo e invariante en el tiempo 

Contínuo y variante en el tiempo 

Discreto e invariante en el tiempo 

Discreto y variante en el tiempo 

Transformada de Laplace de
contínua e invariante en el tiempo

Transformada Z de
discreta e invariante en el tiempo

La estabilidad y la respuesta natural característica de un sistema puede ser estudiado mediante los eigen-valores (o valores propios) de la matriz A. La estabilidad de un modelo de espacio de estados invariante en el tiempo puede ser fácilmente determinado observando la función transferencia del sistema en forma factorizada. Tendría un forma parecida a la siguiente:
El denominador de la función transferencia es igual al polinomio característico encontrado tomando el determinante de sI − A,
 .
.
Las raíces de este polinomio (los eigen-valores) proporcionan los polos en la función transferencia del sistema. Dichos polos pueden ser utilizados para analizar si el sistema es asintótica o marginalmente estable. Otra alternativa para determinar la estabilidad, en la cual no involucra los cálculos de los eigen-valores, es analizar la estabilidad de Liapunov del sistema. Los ceros encontrados en el numerador de
 puede usarse de manera similar para determinar si el sistema posee una fase mínima.
puede usarse de manera similar para determinar si el sistema posee una fase mínima.El sistema podría ser estable con respecto a sus entradas y salidas aún si es internamente inestable. Este pordría ser el caso si polos inestables son cancelados por ceros.
Controlabilidad
La condición de controlabilidad de estados implica que es posible, mediante entradas admisibles, dirigir los estados desde cualquier valor inicial a cualquier valor final dentro de un intervalo de tiempo. Un modelo de espacio de estados contínuo e invariante en el tiempo es controlable si y sólo si
Observabilidad
La observabilidad es la medida de que tan bien los estados internos de un sistema pueden ser inferidos conociendo las salidas externas. La observadlidad y la controlabilidad son matemáticamente duales.
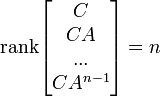
Un modelo de espacio de estados contínuo e invariante en el tiempo es observable si y sólo si:
(el rango de una matriz es el número de filas linealmente independientes.)
Función de transferencia
La función de transferencia de un modelo de espacio de estados contínuo e invariante en el tiempo puede ser obtenida de la siguiente manera:
Tomando la transformada de Laplace de
tenemos que
Luego, dividimos entre
 , dando
, dandoesto es sustituido por
en la ecuación de salida- , nos queda

Como la función de transferencia está definida como la tasa de salida sobre la entrada de un sistema, tomamos
y sustituimos las expresiones previas por
 con respecto a
con respecto a  , quedando
, quedandoClaramente
 debe tener q por p dimensiones, así como un total de qp elementos. Entonces para cada entrada hay q funciones de transferencias con uno por cada salida. Esta es la razón por la cual la representación de espacios de estados puede fácilmente ser la elección preferida para sistemas de múltiples entradas, múltiples salidas (MIMO, por sus siglas en inglés: Multiple-Input, Multiple-Output).
debe tener q por p dimensiones, así como un total de qp elementos. Entonces para cada entrada hay q funciones de transferencias con uno por cada salida. Esta es la razón por la cual la representación de espacios de estados puede fácilmente ser la elección preferida para sistemas de múltiples entradas, múltiples salidas (MIMO, por sus siglas en inglés: Multiple-Input, Multiple-Output).Formas canónicas
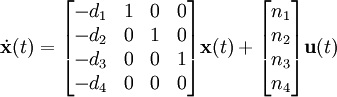
Cualquier función transferencia que es estrictamente propia puede ser escrita como un espacio de estados con la siguiente aproximación:
Dada una función transferencia, expandirla para revelar todos los coeficientes en el numerador y en el denominador. Resultando en la siguiente forma:
 .
.
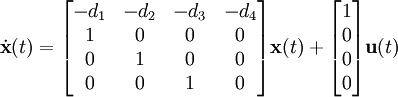
Los coeficientes pueden ser ahora insertados directamente en el modelo de espacio de estados mediante la siguiente aproximación:
 .
.
Esta disposición de espacio de estados es llamada forma canónica controlable porque el modelo resultante garantiza que es controlable.
Los coeficientes de la función transferencia pueden ser usados también para construir otro tipo de forma canónica
 .
.
Esta disposición es llamada forma canónica observable porque el modelo resultante garantiza que es observable.
Funciones transferencia propias
Las funciones transferencia que son sólo propias (y no estrictamente propias) pueden también transformadas a las formas canónicas. El artificio utilizado es el de separar la función transferencia en dos partes, una estrictamente propia y una constante.
La función transferencia estrictamente propia puede ser ahora transformada a las representaciones de espacio de estados canónicas utilizando las técnicas mostradas anteriormente. La representación de espacio de estados de la constante es trivial.
Juntando ambos términos obtenemos las representaciones de espacio de estados con las matrices A, B y C determinadas por la parte estrictamente propia y la matriz D determinada por la constante.
Aquí un ejemplo para aclarar:
lo que conduce a la siguiente representación controlable
Nótese como la salida depende directamente de la entrada. Esto se debe a la constante
 en la función transferencia.
en la función transferencia.Realimentación
Un método utilizado para realimentar es el de multiplicar la salida por una matriz K y colocar el resultado como la entrada del sistema:
 . Como los valores de K no están restrigidos y pueden cambiarse de signo para la realimentación negativa. La presencia de un signo negativo (la notación común) es únicamente con fines de notación y su ausencia no afecta los resultados.
. Como los valores de K no están restrigidos y pueden cambiarse de signo para la realimentación negativa. La presencia de un signo negativo (la notación común) es únicamente con fines de notación y su ausencia no afecta los resultados.resulta en
resolviendo la ecuación de salida para
 y sustituyendo en la ecuación de estados resulta en
y sustituyendo en la ecuación de estados resulta enLa ventaja de esto es que los valores propios de A pueden ser controlados eligiendo K apropiadamente mediante la descomposición en sus valores propios de
 . Esto asume que el sistema de lazo abierto es controlable o que los valores propios inestables de A pueden estabilizarse mediante la elección apropiada de K.
. Esto asume que el sistema de lazo abierto es controlable o que los valores propios inestables de A pueden estabilizarse mediante la elección apropiada de K.Ua simplificación común de este sistema es eliminar D y elegir C igual a la unidad, lo que reduce las ecuaciones a
Esto reduce la descomposición de los valores propios a sólo A + BK.
Categoría: Ingeniería



















Wikimedia foundation. 2010.