- Análisis mecánico diferencial
-
Análisis mecánico diferencial
El análisis mecánico dinámico conocido por sus siglas en inglés como DMA. Es un análisis utilizado en estudios de procesos de relajación y en reología, para estudiar y caracterizar el comportamiento de materiales viscoelásticos como polímeros y sus respuestas ante impulsos, estrés, deformación en tiempo y frecuencia.
Este estudio es importante para la comprensión de la mecánica de materiales poliméricos utilizados como hules, fibras textiles, empaques, plásticos, espumas y diferentes compuestos.
DMA utiliza el principio de estímulo-respuesta, para ello una fuerza oscilante es aplicada a la muestra y el desplazamiento resultante es medido, la rigidez de la muestra puede ser determinada y el módulo de la muestra puede ser calculado. Por medio de la medición del lapso entre el desplazamiento y la fuerza aplicada es posible determinar las propiedades de deformación del material.
Los materiales viscoelásticos como los polímeros existen típicamente "en dos estados", es decir, muestran propiedades vítreas con un módulo considerablemente alto a bajas temperaturas y un estado ahulado, con un módulo relativamente bajo a temperaturas altas. Por medio de un barrido de temperaturas durante un estudio de DMA, se obtiene este cambio de estado entre vítreo y ahulado, se obtiene la transición vítrea dinámica y transición α. La temperatura de transición vítrea o Tg es obtenida en cambio, por medio de estudios de DSC. La transición vítrea dinámica, análoga a la transición vítrea térmica (Tg) provee de datos más útiles para el estudio de los polímeros, puede ser utilizada para investigar la frecuencia (y con las transformaciones matemáticas adecuadas, también el tiempo) en dependencia de la transición. Relajaciones secundarias como la transición β también pueden ser obtenidas para muchos materiales viscoelásticos mientras que por DSC no es posible.
Contenido
Antecedentes
Los primeros intentos de realizar un estudio oscilatorio fueron hechos por Poyting en 1909.[1] En 1978 otros experimentos fueron llevados a cabo por Nijenhuis.[2] Algunos equipos comerciales fueron vendidos desde 1950 como el Weissenberg rheogoniometer y el Rheovibron. Con estos aparatos era posible hacer mediciones de cono y plato y fueron los equipos de mayor uso en los siguientes 20 años. En 1961 Ferry escribe un estudio sobre propiedades viscoelásticas de polímeros[3] incluyendo mediciones dinámicas como parte integral de su estudio. En 1967 McCrum et al. recopiló en su libro de texto las teorías disponibles sobre DMA y DEA,[4] los instrumentos desarrollados en esta etapa eran difíciles de utilizar, lentos, limitados y tenían baja resolución. Perkin Elmer fue una de las primeras compañías es desarrollar un equipo de análisis de estrés controlado, basándose en un equipo previo de tecnología de análisis termomecánico (TMA), este equipo se convirtió en el primer equipo DMA de uso amigable incluyendo el programa computacional "Pyris", para uso en "Windows".
Aunque el análisis mecánico diferencial es una técnica de estudio principalmente utilizado en la investigación científica ha encontrado rápidamente aplicación industrial para efectos de control de calidad y desarrollo de nuevos materiales viscoelásticos. Diversos fenómenos relacionados con este análisis no han sido completamente entendidos y siguen en investigación. Diversas teorías han tratado de explicar estos fenómenos como la del Profesor Wagner.
Antecedentes teóricos Cuando los materiales viscoelasticos son deformados una parte de la energía resultante es almacenada en forma de energía potencial y otra parte es disipada como calor resultante de fricción en interacciones intramoleculares. El estudio de DMA implica la determinación de las propiedades mecánicas dinámicas de los polímeros y sus compuestos, esto se logra por medio del análisis entre las propiedades dinámicas y los parámetros estructurales como cristalinidad, peso molecular, estructura y cantidad de ramificaciones, tipo de copolímero u homopolímero, plastificantes, rellenos, mezclas y orientación. Otros factores influyen directamente en el comportamiento mecánico dinámico de los materiales viscoelásticos como son temperatura, tiempo, frecuencia, presión, tipo de deformación, humedad, agentes corrosivos y oxidantes, coalescencia y degradación del material.Existen tres tipos de vibraciones utilizadas comúnmente por DMA:
- 1. Vibraciones libres Se utilizan cuando las propiedades del polímero son lineares, es decir, independientes de la amplitud. En frecuencias arbitrarias de vibración, el periodo y el decremento logarítmico definen el comportamiento mecánico del polímero.
- 2. Vibraciones resonantes Se utiliza fijando la amplitud de una fuerza oscilante y variando su frecuencia. La frecuencia de resonancia propia de cada material viscoelástico depende de las características elásticas del polímero. Se obtienen también relaciones sobre las fuerzas de disipación.
- 3. Propagación de ondas Basado en la capacidad de propagación de ondas en los sólidos, estas ondas pueden ser elásticas o inelásticas de naturaleza diferente como de extensión, de flexión y torsión. La velocidad con la cual son propagadas estas ondas en un material dado dependen de constantes elásticas, arreglos de compuestos y de la densidad del material. Se obtienen de este tipo de vibraciones la cantidad de energía disipada, el ángulo de fase entre estrés y deformación y la amplitud en diferentes puntos de la muestra.
Principio
El principio utilizado consiste en aplicar una carga oscilante a una muestra sinusoidalmente, la muestra se deforma también con una función sinusoidal y si el material es deformado en su región de viscoelasticidad lineal esta deformación será reproducible. Para cualquier punto de la curva obtenida, el estrés aplicado es descrito como sigue:

Donde:- σ = Estrés en tiempo t.
- σ0 = estrés máximo.
- ω = Frecuencia de oscilación.
Funciones del DMA
Además de el estrés dado por σ = σ0 sin ωt, también es posible obtener la relación de estrés con respecto al tiempo que viene dada por:

Los límites externos del material correspondientes a los comportamientos "Elástico" y "Viscoso" son sumados y proveen al material de la propiedad llamada viscoelasticidad. Cuyo comportamiento puede ser entendido al estar compuesto de un material elástico como un resorte (sólido de Hook) y un líquido (fluido).
La deformación a cualquier tiempo viene dada por

Donde: γ = Deformación en tiempo t G = Módulo
y en términos de viscosidad: η

Análisis con DMA
Los experimentos incluídos en esta técnica incluyen:
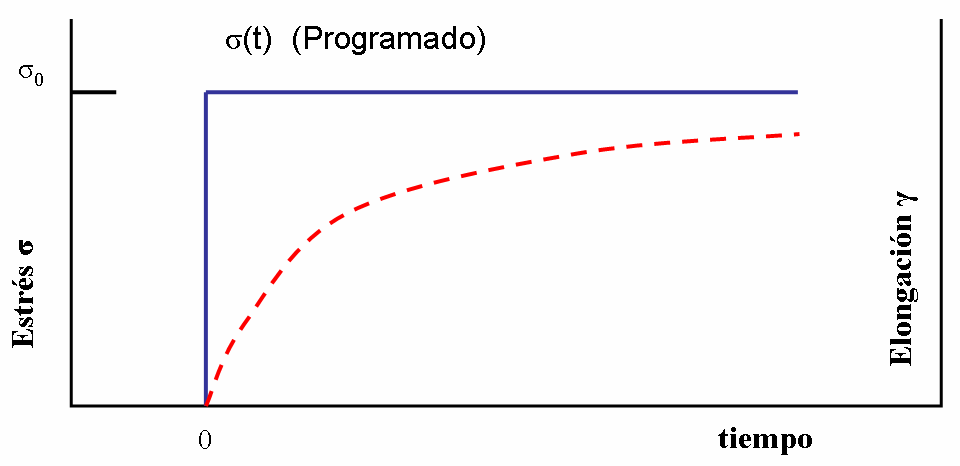
Experimento de creep
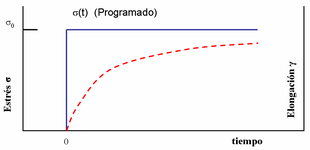
Tradicionalmente se realiza este experimento (creep) con DMA en el rango de s. Es el experimento más común para DMA.
s. Es el experimento más común para DMA.En este experimento se aplica un estrés constante y súbito σ(t) programado durante un tiempo previamente decidido, el cual ocasiona una deformación γ(t) como respuesta, mostrando siempre un lapso entre estrés y deformación, es posible medir la respuesta del material a los esfuerzos y el tiempo que este necesita para relajarse.
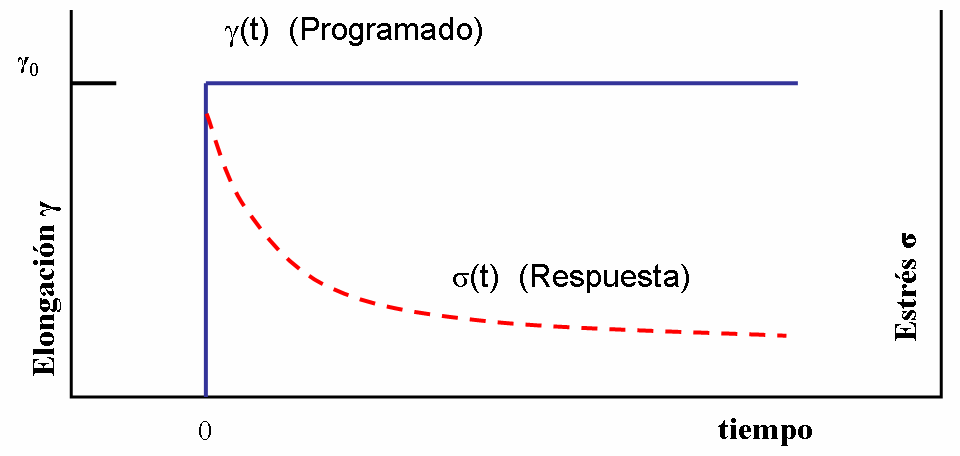
Experimentos de relajación de estrés

El experimento de relajación de estrés por medio de DMA es aplicado en el mismo rango que el experimento de creep: s
Este es un experimento poco común en DMA, el cual consiste en aplicar una deformación constante y súbita γ(t) programada y es medida la respuesta del estrés, el cual tiende a disminuir con el tiempo, esta disminución del estrés da su nombre al experimento y por ello se conoce como proceso de relajación; las macromoléculas tienen la capacidad de tomar configuraciones de menor energía y si los enredos se lo permiten buscan reacomodarse obteniendo una ganacia de entropía. σ(t) en el tiempo y su relajación.Experimentos de corte dinámico
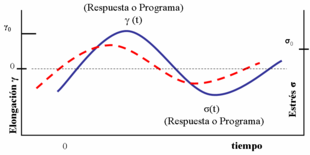
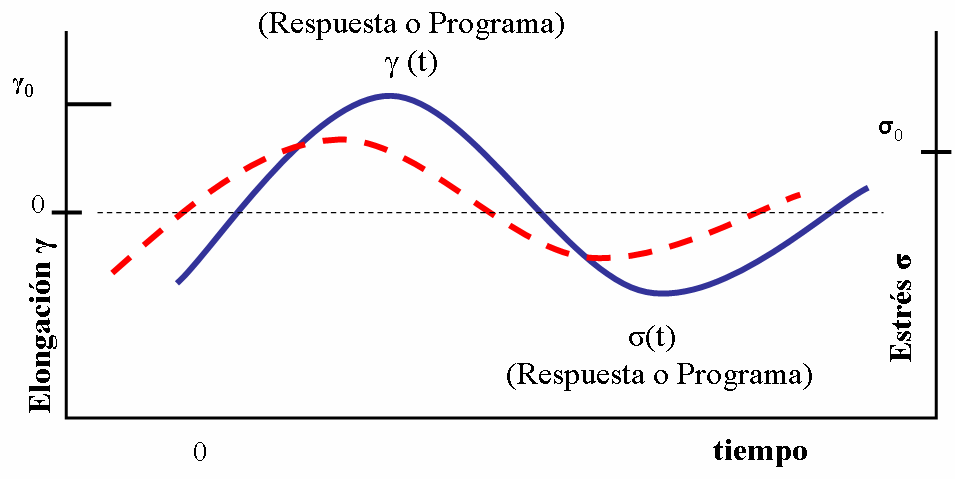
Se realiza en el rango de rad*s-1. También es conocido como método estándard del análisis mecánico diferencial.
rad*s-1. También es conocido como método estándard del análisis mecánico diferencial.- Para: f = 1/T, ω = 2π/T.
En este análisis es aplicada una deformación γ(t) o un estrés σ(t), donde uno es el programa y el otro es la respuesta, este experimento de realiza de forma periódica por medio de una frecuencia en el rango previamente descrito, la respuesta retardada entre la curva del programa y de la respuesta viene dado por δ/ω.
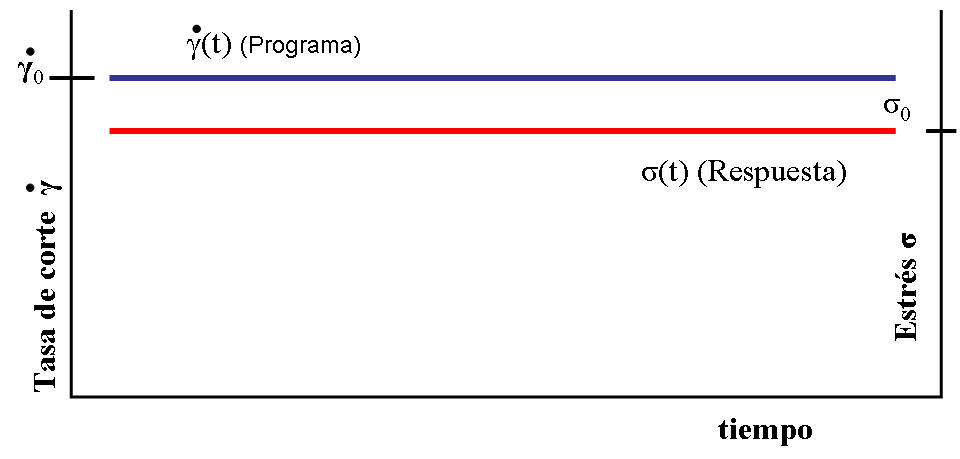
Experimentos de corte estacionario
Utilizado en el rango de
Donde:

Para
 = tasa de deformación [s-1]
= tasa de deformación [s-1]
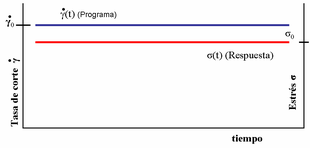
En este experimento para condiciones lineales se obtienen dos curvas lineales paralelas a través del tiempo donde la tasa de deformación es el programa aplicado a la muestra y el estrés resultante es la respuesta del material. La tasa de corte o tasa de deformación es también conocida como "rapidez de deformación" por algunos autores en español.Experimentación
La experimentación con DMA tiene como objetivo el entender el comportamiento viscoelástico de materiales poliméricos para caracterizar sus propiedades prácticas. Se utiliza para clarificar procesos de relajación considerando la estructura molecular de los polímeros. El mecanismo de movimiento microbrowniano requiere un tiempo de reacción y con este lapso es definido el tiempo de relajación característico de cada sistema polimérico. Ejemplos de equipos de laboratorio para DMA son:
- Dynamic-Mechanical Analyser, DMA 242 C of NETZSCH Gerätebau GmbH Selb. Alemania.
- DMA-System DMTA-V of Rheometrics Scientific Piscataway. EEUU.
- DMA-System DX-04T of MAASSEN GmbH. Alemania.
- DMA 861. Fabricado por Mettler-Toledo GmbH
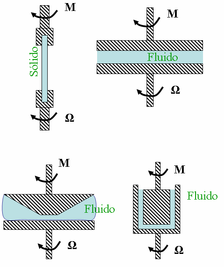
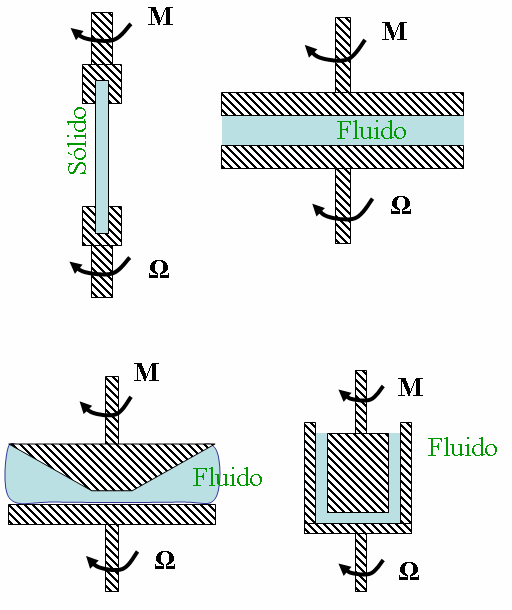
Las geometrías utilizadas para los experimentos incluyen (valores comunes):
- a) Barra. Típicamente de tamaño de 1x10x30 mm2. Para

- b) Platos paralelos. Para diámetros típicos de:
- 8 mm y
 Pa
Pa - ó 25 mm
 Pa
Pa - ó 50 mm
 Pa
Pa
- 8 mm y
- c) Cono y plato. Para diámetros de 25 mm y Pa ó 50 mm Pa
- d) Cubeta. Para diámetros de 40 mm y
 Pa
Pa
Ejemplos de resultados
Existen dos zonas principales, la zona de dispersión y la zona líquida.
Zona de dispersión
En los resultados de los estudios con DMA en la zona de dispersión (correspondiente a la transición vítrea dinámica α) se obtienen resultados complejos de Módulo
 [Pa] y conformidad
[Pa] y conformidad  [Pa-1].
[Pa-1].- Parte real:

- Parte imaginaria:

Relaciones:
y
Zona líquida
En la zona de líquidos se obtienen resultados de mediciones de viscosidad. De los experimentos de corte estacionario se obtienen las relaciones de temperatura y viscosidad con respecto de la tasa de corte.
Experimentos de corte estacionario: contra
contra 

Experimentos dinámicos: contra
contra 
.Construcción de curvas maestras
Las curvas maestras son construídas debido a que es prácticamente imposible realizar un estudio en todos los rangos de frecuencias posibles. Es posible realizar estas curvas debido al principio de superposición de tiempo-temperatura, es decir, a diferentes temperaturas el material reacciona de forma similar a como este respondería bajo otras frecuencias de perturbación. Esto es posible debido a que existe una equivalencia entre el tiempo y la frecuencia y la temperatura, Leaderman[5] descubrió en 1943 que los datos obtenidos para polímeros a una temperatura podrían ser superpuestos (acoplados) a datos obtenidos a otras temperaturas simplemente recorriendo horizontalmente (en algunas excepciones también verticalmente) las curvas correspondientes en la escala logarítmica de tiempo. Este descubrimiento dio origen a la construcción de curvas maestras, cuyos tiempos sobrepasan en gran medida la capacidad de un experimento, ampliando la ventana de resultados. El factor de desplazamiento (horizontal) no es fijo aunque normalmente es constante para cada polímero y es llamado aT. Una de las ecuaciones más famosas para describir la relación entre estos ajustes es la llamada ecuación WLF (por Williams-Landel-Ferry[6] )
Ecuación WLF:
![a_T = -C_1 \, (T - T_g) / [C_2 \, + \, T - T_g]](/pictures/eswiki/99/c6aad674d547bf7adb80a9cc995b7aae.png)
Donde las constantes: C1 = 17.4 (Para muchos polímeros) C2 = 51.6 (Para muchos polímeros)
y en términos de viscosidad:

donde:
η = Viscosidad ρ = Densidad a la temperatura T correspondiente.
El procedimiento de construcción de estas curvas maestras implica la realización de estudios a diferentes temperaturas en un rango prestablecido de frecuencias (e.g.
 ) contra G' o G''.
) contra G' o G''.Funciones de acoplamiento
Las funciones de acoplamiento utilizadas para los experimentos de DMA incluyen funciones como la función de de Kohlrausch-Williams-Watts, la función de Cole-Cole y en el caso de datos de corte se puede utilizar un análisis de la retardación de espectros para módulos y concordancias expresado como sumas de decaimientos exponenciales.
Relajación y retardación
En los experimentos de DMA, generalmente en datos de relajación se obtienen funciones de relajación y retardación. Módulos y Conformidades pueden ser expresados como una suma de decaimientos exponenciales (o pasos). Es común que para efectos prácticos sean excluídos los efectos de resonancia en el rango de relajación.
Para analizar estos efectos se utiliza la distribución del modelo de Maxwell (Módulos) y los elementos de Voigt-Kelvin (Conformidades).
Módulos de espectros de relajación
 :
:
Conformidades, retardación del espectro :
:
Donde el elemento de Maxwell es representado por: Un resorte unido en serie con un pistón.




y el elemento de Voigt-Kelvin viene dado por: Un resorte unido de forma paralela a un pistón, donde los estréses resultan en:
otras relaciones:

![J (\tau) = 1/G_0 \cdot [1-exp (-\tau/\tau_0)]](/pictures/eswiki/101/e6288c4177fb4bff6cea5be5735cf233.png)
Donde: tiempo de relajación.
tiempo de relajación.Referencias
- ↑ J. H. Poyntang, Proc. Royal Soc., Series A, 82, 546 (1909).
- ↑ K. te Nijenhuis, Rheology Volume 1 Principles, edited by G. Astarita et al., Plenum Press, New York, 263 (1980).
- ↑ J. Ferry, Viscoelastic Properties of Polymers, 3rd Edition, John Wiley and Sons, New York (1980).
- ↑ N. McCrum, B. Williams, G. Read, Anelastic and Dielectric Effects in Polymeric Solids, Dover: New York (1991).
- ↑ H. Leaderman, Elastic and Creep Properties of filamentous Materials and Other High Polymers, Textil Foundation, Washington, D.C., 1943
- ↑ M. L. Williams, R. F. Landel, J. D. Ferry, J. Am. Chem. Soc., 77 (1955)
Bibliografía
- N.W. Tschögl "The Phenomenological Theory of Linear Viscoelastic Behavior", Springer, Berlin, 1989.
- Murayama, Takayuki. "Dynamic Mechanical Analysis of polymeric material". Amsterdam 1978. ISBN 0-444-41684-6.
- Kevin Menard, Kevin P. Menard. "Dynamic Mechanical Analysis: A Practical Introduction". New York 1999. ISBN 0-8493-8688-8
- Menard, DMA: Introduction to the Technique, Its Applications and Theory, CRC Press, 1999.
- Brostow et a., Failure of Plastics, Hanser, 1986.
- Gordon et al., Computer Programs for Rheologists, Hanser, 1995.
- Gol'dman, Prediction of Deformation Properties of Polymeric and Composite Materials,, ACS, 1994.
- Matsouka, Relaxation Phenomena in Polymers, Hanser, 1993.
- McCrum et al, Anelastic and Dielectric Properties of Polymeric Solids, Dover, 1992 (reprint of 1967 edition).
- Sperling, Introduction to Physical Polymer Science, Academic Press, 1994.
- Ward et al., Introduction to Mechanical Properties of Solid Polymers, Wiley, 1993.
Véase también
Enlaces externos
Categorías: Ciencia de polímeros | Técnicas científicas
![G^\prime = J^\prime / (|J^*|)^2 = J^\prime / [ (J^\prime)^2 + (J^{\prime\prime})^2 ]](/pictures/eswiki/54/68c64d308062451bd2f904fa919ff1bf.png)
![G^{\prime\prime} = J^{\prime\prime} / (|J^*|)^2 = J^{\prime\prime} / [ (J^\prime)^2 + (J^{\prime\prime})^2 ]](/pictures/eswiki/54/6d5fe60abd6d4a4a0e9ce40a59aa52fa.png)
![J^\prime = G^\prime / (|G^*|)^2 = G^\prime / [ (G^\prime)^2 + (G^{\prime\prime})^2 ]](/pictures/eswiki/50/26124cfb955b504f1aa6e8fe23297a93.png)
![J^{\prime\prime} = G^{\prime\prime} / (|G^*|)^2 = G^{\prime\prime} / [ (G^\prime)^2 + (G^{\prime\prime})^2 ]](/pictures/eswiki/55/773d1029503d0ee3d58fa6ee71ba27a8.png)
![G (\ln \tau) = G_e \,+ \, \sum_{i}G_0 \, \exp[-\tau/\tau_{0i}]](/pictures/eswiki/57/93e9e044a6684f4f2817f57e0b027b11.png)
![G (\ln \tau) = G_e \, + \, \int_{-\infty}^{\infty} H (\ln \tau_0) \, \cdot \, \exp[-\tau/\tau_{0i}] d\ln\tau_0](/pictures/eswiki/100/d21813194777b0a377e58ef27f56c615.png)
![J (\ln \tau) = J_g + \tau/\eta + \sum_{i}J_0 \cdot (1-\exp[-\tau/\tau_{0i}])](/pictures/eswiki/48/01b6865b0ae993f774d28ecc51d9ec38.png)
![J (\ln \tau) = J_g + \tau/\eta + \,\int_{-\infty}^{\infty} L(\ln \tau_0)\, \cdot \, (1-\exp [-\tau/\tau_0])\, d\ln\tau_0](/pictures/eswiki/51/3eaa0a3a7c25af9e71157f8ff8bb043f.png)
Wikimedia foundation. 2010.