- Mecánica de contacto
-
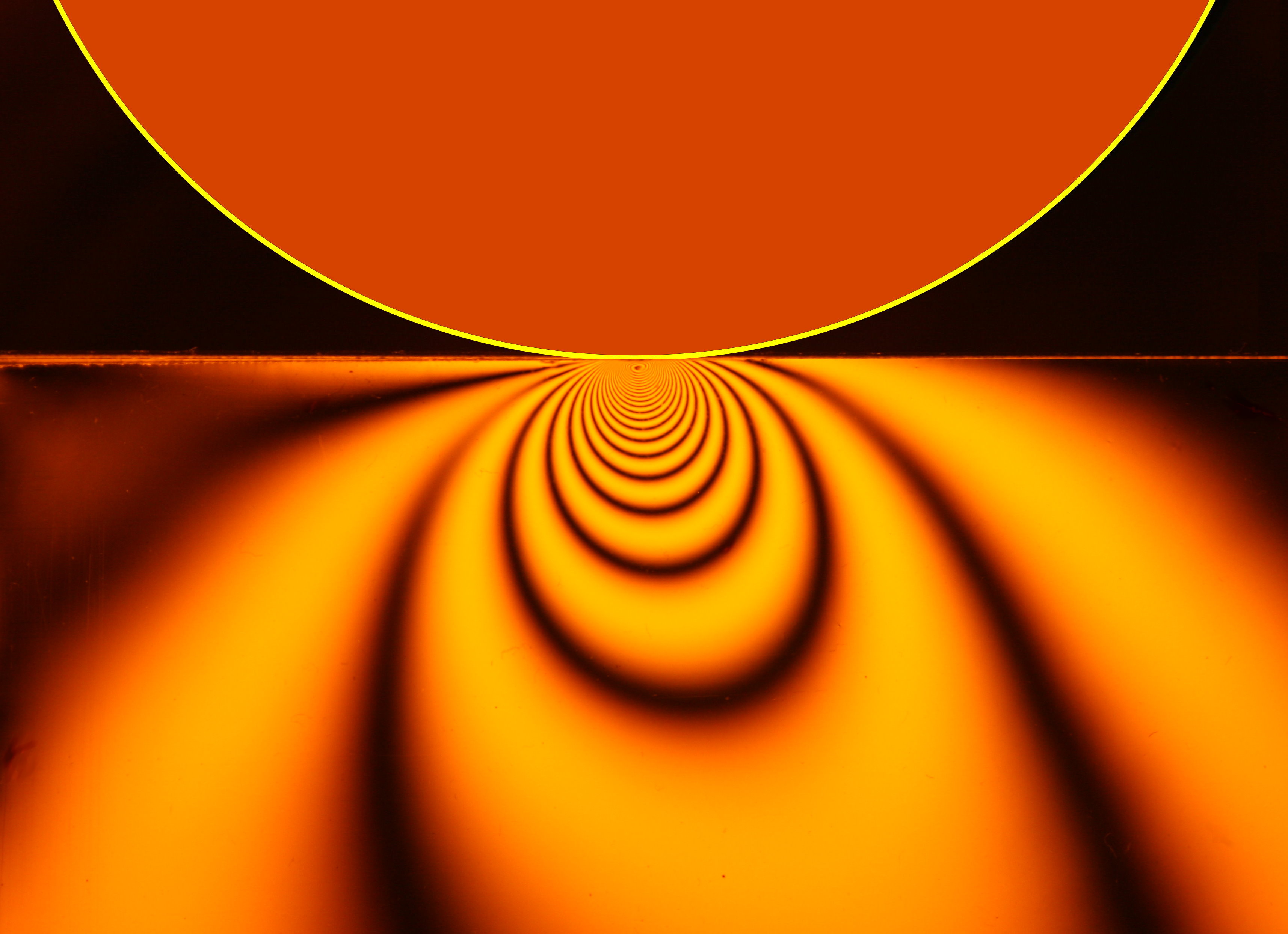
 Tensiones en el área de contacto cargados simultáneamente con una fuerza normal y tangencial. Tensiones visibles usando fotoelasticidad.
Tensiones en el área de contacto cargados simultáneamente con una fuerza normal y tangencial. Tensiones visibles usando fotoelasticidad.
El área de la mecánica de contacto se ocupa del análisis de los cuerpos elásticos, viscoelásticos o plásticos que se encuentran en contacto estático o dinámico. La mecánica de contacto es una disciplina fundamental dentro de la ingeniería para el diseño de sistemas técnicos basados en la seguridad y el ahorro de energía.
Los principios de la mecánica de contacto pueden ser aplicables en áreas como el contacto rueda-carril, mecanismos de acoplamiento, embragues, sistemas de frenos, neumáticos y rodamientos deslizantes, motores de combustión, articulaciones, juntas, remodelaciones, estudio de materiales, soldadura por ultrasonidos, contactos eléctricos y muchos otros. Los desafíos actuales en este campo incluyen desde la verificación de resistencia entre elementos de contacto y la influencia de la lubricación y el diseño de material en la fricción y el desgaste. Otras aplicaciones de la mecánica de contacto se amplían al campo de la micro y nanotecnología.
Historia
La mecánica de contacto clásica suele relacionarse con Heinrich Hertz. En 1882 Hertz resolvió el problema del contacto entre dos cuerpos elásticos con superficies curvas (ver también tensión de contacto de Hertz). Esta todavía relevante solución clásica sopone el fundamento para problemas más modernos de la mecánica de contacto. No fue sino hasta casi cien años después que Johnson, Kendall, y Roberts encontraron una solución similar para el caso del contacto adhesivo (Teoría JKR). Nuevos avances en el campo de la mecánica de contacto en la primera mitad del siglo XX se pueden atribuir a nombres como Bowden y Tabor. Bowden y Tabor fueron los primeros en destacar la importancia de la rugosidad de la superficie de los cuerpos en contacto. A través de la investigación de la rugosidad de la superficie, se obtuvo que la verdadera área de contacto entre las partes en fricción típicamente es inferior en órdenes de magnitud al área de contacto aparente. Tal comprensión cambió también drásticamente el rumbo de las empresas dedicadas a la tribología. Los trabajos de Bowden y Tabor originaron varias teorías sobre mecánica de contacto para superficies rugosas. La contribución de Archard (1957) debe ser también mencionada en relación a trabajos pioneros en este campo. Archard concluyó que, incluso para superficies elásticas rugosas, el área de contacto era aproximadamente proporcional a la fuerza normal. Otras cuestiones incluidas en estas líneas fueron ofrecidas por Greenwood and Williamson (1966), Bush (1975), and Persson (2002). Los descubrimientos más importantes sobre estos trabajos fueron los siguientes: la verdadera superficie en contacto en materiales rugosos es generalmente proporcional a la fuerza normal, mientras que los parámetros de micro-contactos individuales (es decir, presión, dimensión del micro-contacto) dependen muy ligeramente de la carga.
Problemas clásicos de la mecánica de contacto
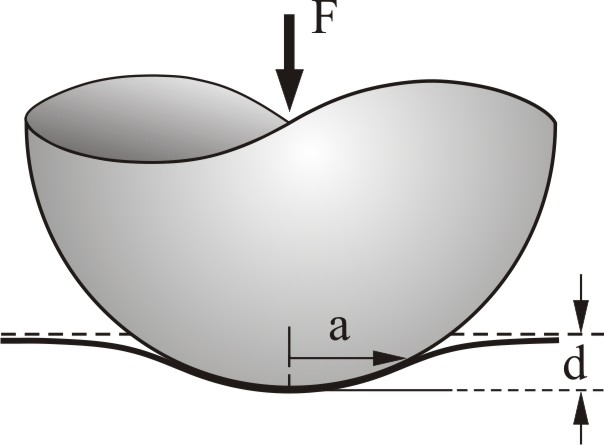
Contacto entre una esfera y un semi-espacio elástico
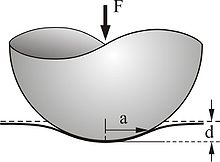 Contacto entre una esfera y un semi-espacio elástico.
Contacto entre una esfera y un semi-espacio elástico.Una esfera elástica de radio R se hunde la profundidad d en un semiespacio elástico , creando así un área de contacto de radio
 . La fuerza F necesaria toma la siguiente forma
. La fuerza F necesaria toma la siguiente forma  ,
,con
 .
.E1 y E2 son los módulos de elasticidad y ν1,ν2 son los coeficientes de Poison asociados a cada cuerpo.
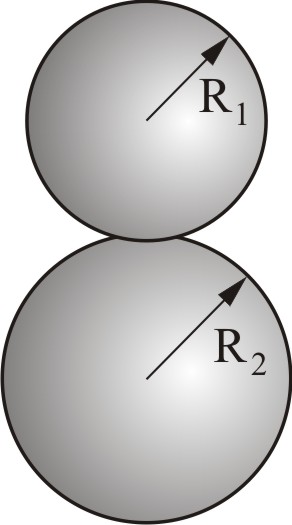
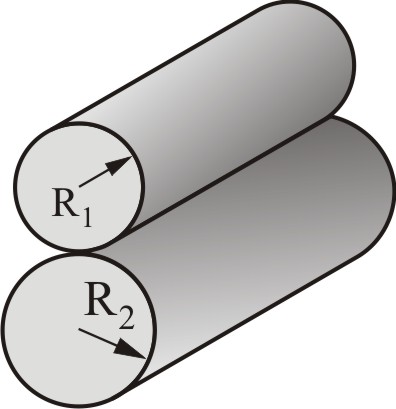
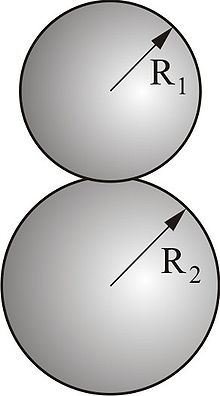 Contacto entre dos esferas.
Contacto entre dos esferas.Dado un contacto entre dos esferas de radios R1 y R2, las ecuaciones siguen válidas, con el radio R definido como
 .
.La distribución de presiones en el área de contacto está dada por
 ,
,con
 .
.El máximo esfuerzo cortante se da en el interior con
 para ν = 0.33.
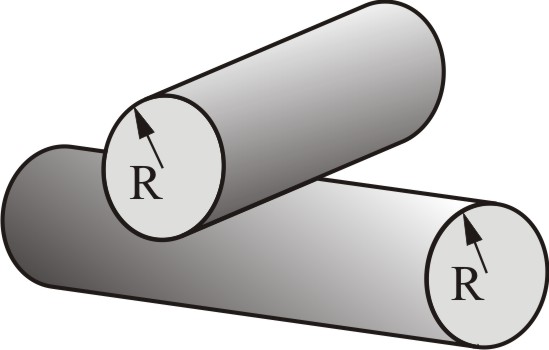
para ν = 0.33.Contacto entre dos cilindros cruzados de mismo radio R
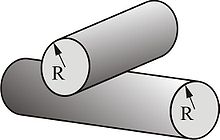 Contacto entre dos cilindros cruzados de mismo radio.
Contacto entre dos cilindros cruzados de mismo radio.Esto es equivalente al contacto entre una esfera de radio R y un plano (ver arriba).
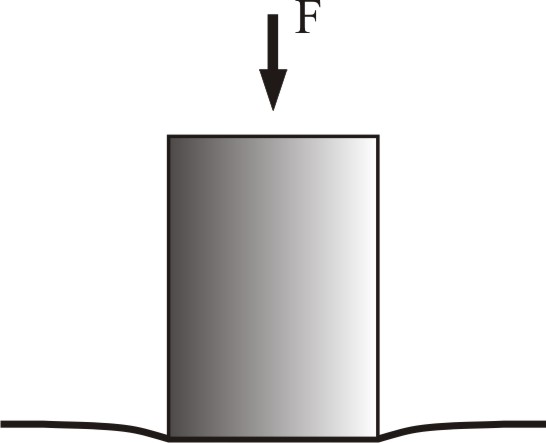
Contacto entre un cilindro rígido y un semi-espacio elástico
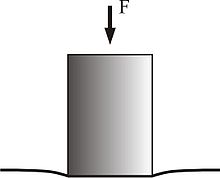 Contacto entre un cilindro rígido y un semi-espacio elástico.
Contacto entre un cilindro rígido y un semi-espacio elástico.Un cilindro rígido es presionado en un semiespacio elástico, creando una distribución de presiones descrito por
 ,
,con
 .
.La relación entre la profundidad de la hendidura y la fuerza normal está dada por
 .
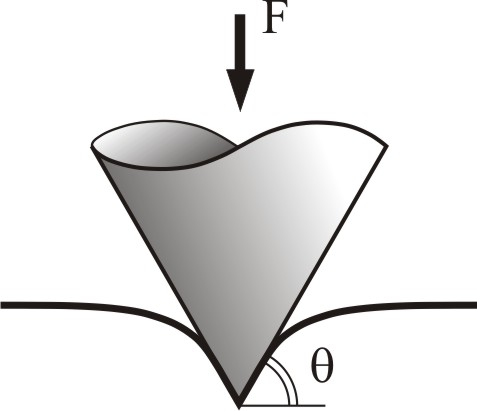
.Contacto entre una hendidura cónica rígida y un semi-espacio elástico
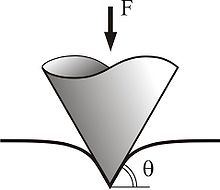 Contacto entre una hendidura cónica rígida y un semi-espacio elástico.
Contacto entre una hendidura cónica rígida y un semi-espacio elástico.En el caso del hundimiento de una hendidura cónica rígida en un semiespacio elástico, la profundidad de la hendidura y el radio de contacto están relacionados por
 ,
,con θ definido como el ángulo entre el plano y la superficie lateral del cono. La distribución de presiones toma la forma
 .
.El esfuerzo tiene una singularidad logarítmica en la punta del cono (en el centro del área de contacto). La fuerza total se calcula
 .
.Contacto entre dos cilindros con ejes paralelos
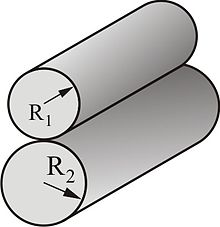 Contacto entre dos cilindros con ejes paralelos.
Contacto entre dos cilindros con ejes paralelos.En el contacto entre dos cilindros de ejes paralelos, la fuerza es linealmente proporcional a la profundidad de la hendidura:
 .
.Los radios de curvatura no aparecen en esta relación. El radio de contacto esta descrito a través de la relación
,con
,como en el contacto entre dos esferas. La presión máxima es igual a
 .
.Contacto entre superficies rugosas
Cuando dos cuerpos con superficies rugosas son presionados uno contra otro, el área real de contacto A es mucho menor que el área de contacto aparente A0 . En el contacto entre una superficie de "rugosidad aleatoria" y un semiespacio elástico, el área real de contacto esta relacionada con la fuerza normal F por
 ,
,con h' igual a la raíz cuadrática media (también conocida como la media cuadrática) de la pendiente superficial y
 . La presión media en la superficie de contacto real
. La presión media en la superficie de contacto real 
puede ser razonablemente estimada como la mitad del módulo elástico efectivo E * multiplicado por la raíz cuadrática media de la pendiente superficial h' .
Dado que la presión es mayor que la resistencia material σ0, resulta que

representa las micro-asperezas en un estado de completa plasticidad. Para
 , la superficie se comporta elásticamente durante el contacto. El parámetro Ψ fue introducido por Greenwoord y Williamson y está referido al índice de plasticidad. El hecho de que el sistema se comporte plásticamente o elásticamente es independiente de la fuerza normal aplicada.
, la superficie se comporta elásticamente durante el contacto. El parámetro Ψ fue introducido por Greenwoord y Williamson y está referido al índice de plasticidad. El hecho de que el sistema se comporte plásticamente o elásticamente es independiente de la fuerza normal aplicada.Referencias
- Johnson, K. L.: Contact mechanics. Cambridge University Press, 6. Nachdruck der 1. Auflage, 2001.
- Popov, Valentin L.: Kontaktmechanik und Reibung. Ein Lehr- und Anwendungsbuch von der Nanotribologie bis zur numerischen Simulation, Springer-Verlag, 2009, 328 S., ISBN 978-3-540-88836-9.
- Popov, Valentin L.: Contact Mechanics and Friction. Physical Principles and Applications, Springer-Verlag, 2010, 362 p., ISBN 978-3-642-10802-0.
- Sneddon, I. N.: The Relation between Load and Penetration in the Axisymmetric Boussinesq Problem for a Punch of Arbitrary Profile. Int. J. Eng. Sci.,1965, v. 3, pp. 47–57.
- Hyun, S., and M.O. Robbins: Elastic contact between rough surfaces: Effect of roughness at large and small wavelengths. Trobology International, 2007, v.40, pp. 1413-1422.
Wikimedia foundation. 2010.