- Motor paso a paso
-
 Motor paso a paso (PaP)
Motor paso a paso (PaP)
El motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un conversión digital-analógica y puede ser gobernado por impulsos procedentes de sistemas lógicos.
Este motor presenta las ventajas de tener alta precisión y repetibilidad en cuanto al posicionamiento. Entre sus principales aplicaciones destacan como motor de frecuencia variable, motor de corriente continua sin escobillas, servomotores y motores controlados digitalmente.
Existen 3 tipos fundamentales de motores paso a paso: el motor de reluctancia variable, el motor de magnetización permanente, y el motor paso a paso híbrido.
Contenido
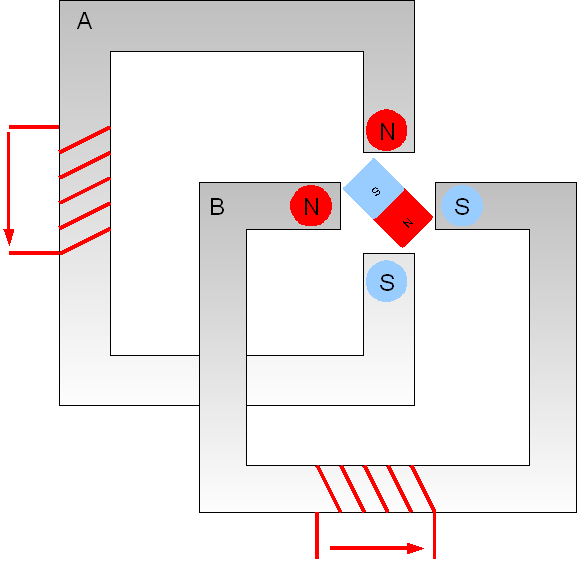
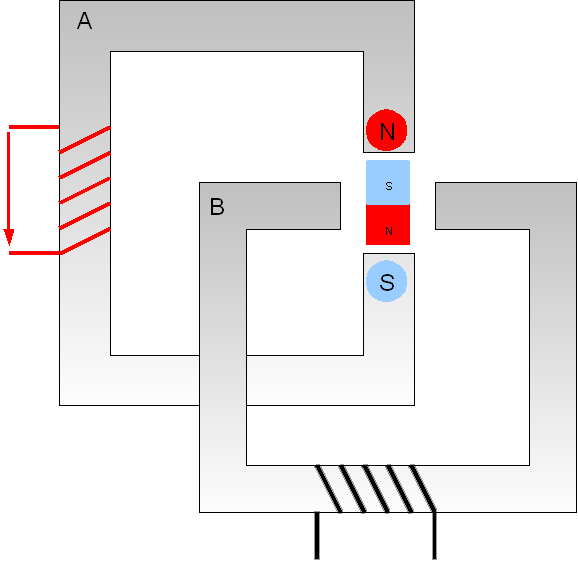
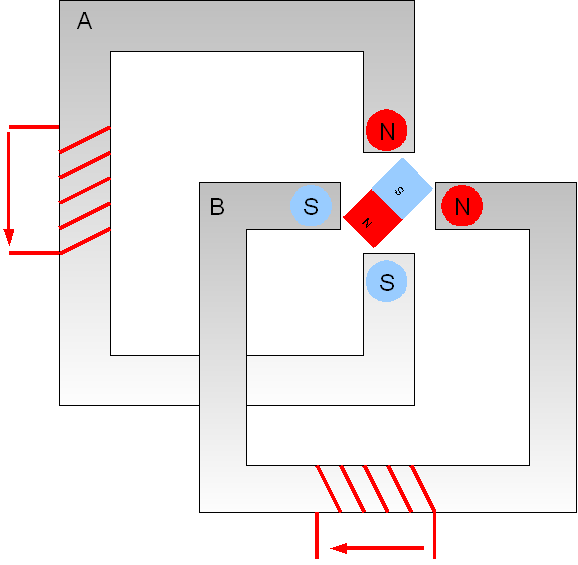
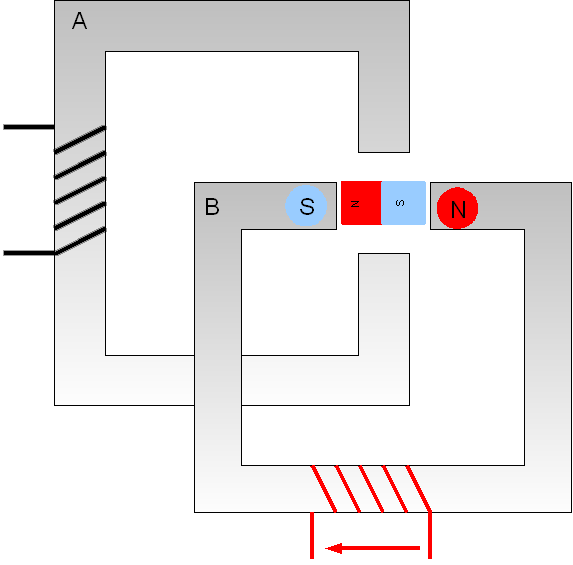
Secuencia de funcionamiento
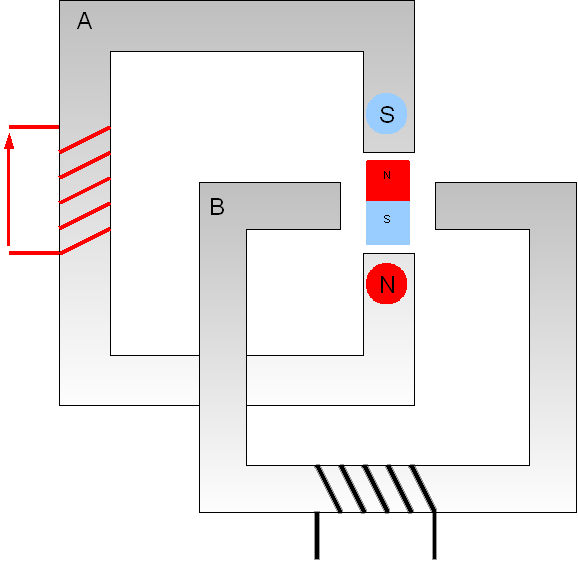
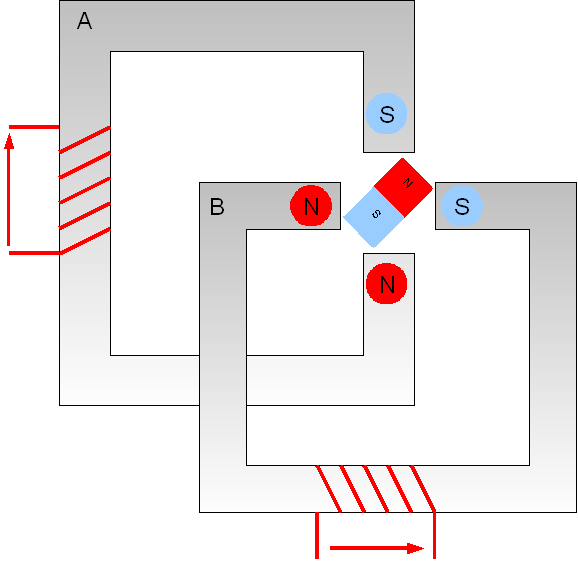
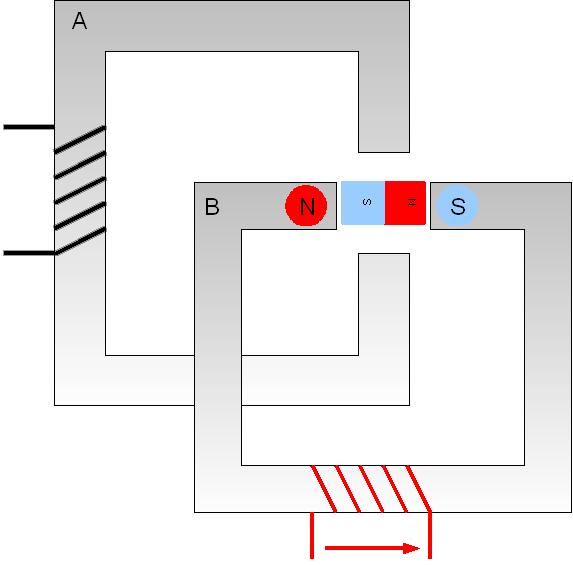
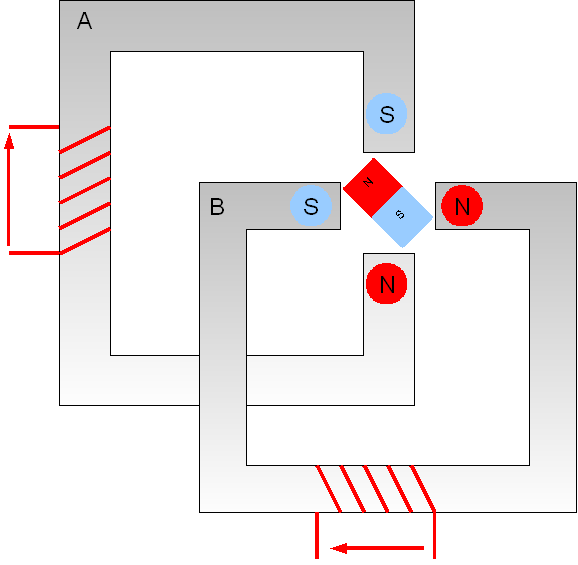
Observese como la variación de la dirección del campo magnético creado en el estátor producirá movimiento de seguimiento por parte del rotor de imán permanente, el cual intentará alinearse con campo magnético inducido por las bobinas que excitan los electroimanes (en este caso A y B). Vcc es la alimentación de corriente continua (por ejemplo 5V, 12V, 24V...)
Tabla de orden de fases. En este caso concreto el motor tendrá un paso angular de 90º y un semipaso de 45º (al excitarse más de una bobina) Paso Terminal 1
Bobina ATerminal 2
Bobina ATerminal 1
Bobina BTerminal 2
Bobina BImagen Paso 1 +Vcc -Vcc 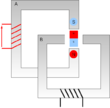
(Semi-)Paso 2 +Vcc -Vcc +Vcc -Vcc 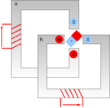
Paso 3 +Vcc -Vcc 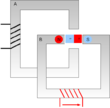
(Semi-)Paso 4 -Vcc +Vcc +Vcc -Vcc 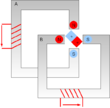
Paso 5 -Vcc +Vcc 
(Semi-)Paso 6 -Vcc +Vcc -Vcc +Vcc 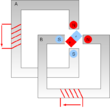
Paso 7 -Vcc +Vcc 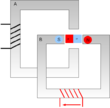
(Semi-)Paso 8 +Vcc -Vcc -Vcc +Vcc 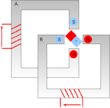
Control de las bobinas
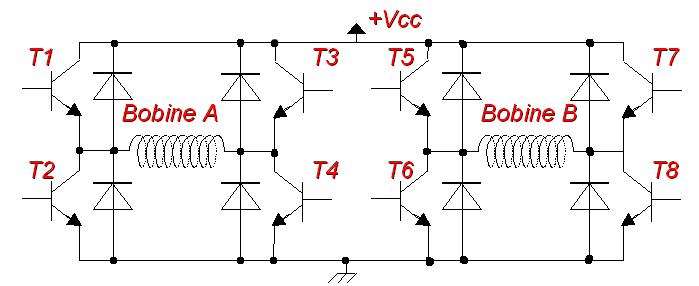
Para el control del motor paso a paso de este tipo (bipolar), se establece el principio de "Puente H", si se activan T1 y T4, permiten la alimentación en un sentido; si cambiamos el sentido de la alimentación activando T2 y T3, cambiaremos el sentido de alimentación y el sentido de la corriente.
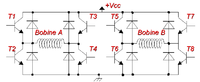 Topología de "puente en H" para las bobinas A y B
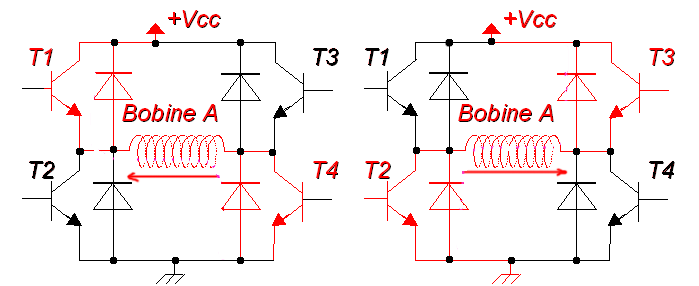
Topología de "puente en H" para las bobinas A y B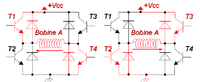 variación de la alimentación de corriente de la bobina A según los transistores T1, T2, T3, T4
variación de la alimentación de corriente de la bobina A según los transistores T1, T2, T3, T4Velocidad de rotación
La velocidad de rotación viene definida por la ecuación:
donde:
- f: frecuencia del tren de impulsos
- n: nº de polos que forman el motor
Si bien hay que decir que para estos motores, la máxima frecuencia admisible suele estar alrededor de los 625 Hz. Si la frecuencia de pulsos es demasiado elevada, el motor puede reaccionar erróneamente en alguna de las siguientes maneras:
- Puede que no realice ningún movimiento en absoluto.
- Puede comenzar a vibrar pero sin llegar a girar.
- Puede girar erráticamente.
- O puede llegar a girar en sentido opuesto.
- Incluso perder potencia
lo importante es que también coloquen a disposición un simulador o circuito para probar estos motores paso a paso para descartar fallas en ello.
Tipos de motores paso a paso
El motor de paso de rotor de imán permanente: Permite mantener un par diferente de cero cuando el motor no está energizado. Dependiendo de la construcción del motor, es típicamente posible obtener pasos angulares de 7.5, 11.25, 15, 18, 45 o 90°. El ángulo de rotación se determina por el número de polos en el estator
El motor de paso de reluctancia variable (VR): Tiene un rotor multipolar de hierro y un estator devanado laminado, y rota cuando los dientes del rotor son atraídos a los dientes del estator electromagnéticamente energizados. La inercia del rotor de un motor de paso de reluctancia variable es pequeña y la respuesta es muy rápida, pero la inercia permitida de la carga es pequeña. Cuando los devanados no están energizados, el par estático de este tipo de motor es cero. Generalmente, el paso angular de este motor de paso de reluctancia variable es de 15°
El motor híbrido de paso: Se caracteriza por tener varios dientes en el estator y en el rotor, el rotor con un imán concéntrico magnetizado axialmente alrededor de su eje. Se puede ver que esta configuración es una mezcla de los tipos de reluctancia variable e imán permanente. Este tipo de motor tiene una alta precisión y alto par y se puede configurar para suministrar un paso angular tan pequeño como 1.8°.
Motores paso a paso Bipolares: Estos tienen generalmente 4 cables de salida. Necesitan ciertos trucos para ser controlados debido a que requieren del cambio de dirección de flujo de corriente a través de las bobinas en la secuencia apropiada para realizar un movimiento.
Motores paso a paso unipolares: estos motores suelen tener 5 ó 6 cables de salida dependiendo de su conexionado interno. Este tipo se caracteriza por ser más simple de controlar, estos utilizan un cable común a la fuente de alimentación y posteriormente se van colocando las otras lineas a tierra en un orden especifico para generar cada paso, si tienen 6 cables es porque cada par de bobinas tiene un común separado, si tiene 5 cables es porque las cuatro bobinas tiene un solo común; un motor unipolar de 6 cables puede ser usado como un motor bipolar si se deja las lineas del común al aire.
Véase también
Enlaces externos
- «Tutorial sobre el control de motores paso a paso» (en inglés). Consultado el 08/06/09.
- [Guía de Selección de motor paso a paso]
- «Motores paso a paso, características básicas» (en español). Consultado el 08/06/09.
Categoría:- Motores eléctricos


Wikimedia foundation. 2010.