- Canadarm 2
-
Canadarm 2
 El astronauta Stephen K. Robinson anclado al extremo del Canadarm2 durante la STS-114
El astronauta Stephen K. Robinson anclado al extremo del Canadarm2 durante la STS-114
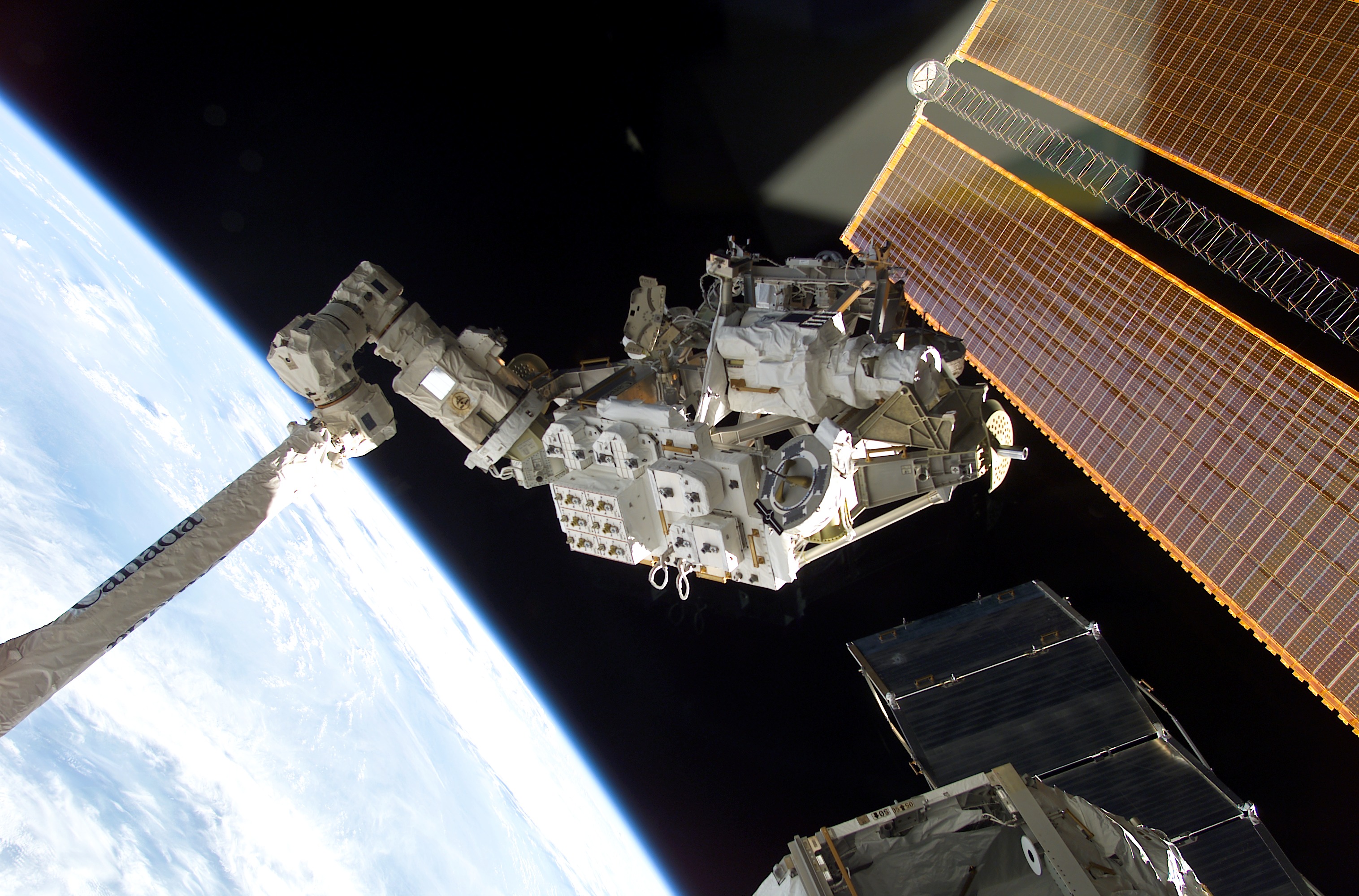
El Sistema Móvil de Servicio (en inglés Mobile Servicing System, MSS), mejor conocido por su componente principal el Canadarm2, es un sistema robotizado y de equipamiento asociado a la Estación Espacial Internacional. Tiene un importante papel en el ensamblaje y mantenimiento de la estación: moviendo equipos y suministros por la estación, ayudando en el exterior en el trabajo de los astronautas y revisando instrumentos y otras cargas añadidas a la estación. Los astronautas reciben un entrenamiento especial para poder realizar todas estas acciones con diversos sistemas.
El MSS está formado por un brazo robótico llamado (SSRMS) siglas del inglés Manipulador Remoto de la Estación Espacial, el (MBS) del inglés Servicio Remoto Móvil del Sistema Base y el (SPDM) o Manipulador Diestro de Propósito Especial, también llamado Dextre ó Canada hand. El sistema puede moverse a lo largo de unos raíles.
Sistema base móvil
 El Sistema base móvil justo antes de la instalación del Canadarm2 en el transporte móvil durante la STS-111
El Sistema base móvil justo antes de la instalación del Canadarm2 en el transporte móvil durante la STS-111El Sistema base móvil (MBS, Mobile Base System en inglés) es una plataforma base para el brazo robótico. Fue añadida a la estación durante la STS-111 en junio de 2002. La plataforma descansa sobre el Transporte móvil (instalado durante la STS-110) que le permite deslizarse por los raíles situados sobre los armazones de la estación. Cuando el Canadarm2 se acopló al MBS, tenía la capacidad de viajar a los puntos de trabajo a lo largo de toda la estructura de armazones. La velocidad máxima del Transporte móvil es de unos 2,5 cm por segundo.[1] El nombre apropiado para el MBS es el "MRS Base System", donde MRS significa "Mobile Remote Servicer" (Servicio remoto móvil). Está hecho de aluminio y se espera que dure al menos 15 años. Como el Canadarm2 fue construido por MD Robotics.[2] [3]
El MBS está equipado con 4 Power Data Grapple Fixtures, uno en cada una de sus cuatro esquinas. Cualquiera de esas pueden usarse como una base para los dos robots, el Canadarm2 y el Dextre, así como para cualquiera de las cargas útiles que podrían agarrar los robots. El MBS tiene además 2 posiciones para amarrar cargas útiles. El primero es el Payload/Orbital Replacement Unit Accommodations (POA). Este es un dispositivo que se parece mucho y funciona como los efectores finales de enclavamiento del Canadarm2. Puede usarse para aparcar, propulsar y dirigir cualquier carga útil con una agarradera, mientras se deja libre al Canadarm2 de realizar cualquier tarea. La otra posición de agarre es para el MBS Common Attachment System (MCAS). Este es otro tipo de sistema de amarre que se usará principalmente para mantener algunos experimentos científicos.[2]
El MBS mantiene también a los astronautas durante las actividades extravehiculares. Tiene localizaciones para guardar herramientas y equipos, limitadores de pies, pasamanos y puntos de amarre de seguridad así como una cámara de ensamblaje. Si se necesita, es incluso posible para un astronauta "montarse" sobre el MBS mientras se desplaza por los raíles del armazón.
Referencias
- Todo o parte de este artículo fue creado a partir de la traducción parcial del artículo Canadarm2 de la Wikipedia en inglés, concretamente de esta versión, bajo licencia Creative Commons Compartir Igual 3.0. y GFDL.
- ↑ «The Slowest and Fastest Train in the Universe». NASA.
- ↑ a b «CSA - STS-111 - Mobile Base System - MBS Design». Canadian Space Agency. Consultado el 2008-03-15.
- ↑ «CSA - STS-111 - Mobile Base System - Backgrounder». Canadian Space Agency. Consultado el 2008-03-15.
Categorías: Programa espacial de Canadá | Inventos canadienses | Módulos de la Estación Espacial Internacional

Wikimedia foundation. 2010.