- Fuerza ficticia
-
Una fuerza ficticia es el efecto percibido por un observador estacionario respecto a un sistema de referencia no inercial cuando analiza su sistema como si fuese un sistema de referencia inercial. La fuerza ficticia se representa matemáticaticamente como un vector fuerza calculable a partir de la masa de los cuerpos sobre la que actúa y la aceleración respecto del sistema de referencia no inercial.
Otros términos equivalentes para caracterizar la inercia en este tipo de análisis, en que el punto de vista es no-inercial (es decir, acelerado), son: pseudofuerzas o fuerzas inerciales.
La expresión fuerza ficticia no significa que dicha fuerza sea un efecto óptico, sino que asumimos que ésta actúa sobre un cuerpo cuando la realidad no es tal, ya que tan solo es una invención para explicarnos de una forma simple, y hasta cierto punto intuitiva, la aparición de efectos desacostumbrados.
 La variación de trayectoria o velocidad le sucede al coche, y el pasajero sólo sigue su inercia.
La variación de trayectoria o velocidad le sucede al coche, y el pasajero sólo sigue su inercia.
- Ejemplo
El pasajero de un automóvil que toma como referencia este para medir la aceleración de su propio cuerpo, cuando el vehículo frena o describe una curva, siente una «fuerza» que le empuja hacia delante o a un lateral. En realidad lo que actúa sobre su cuerpo no es una fuerza, sino la inercia (causada por la velocidad de la masa) que hace que tenga tendencia a mantener la dirección y cantidad de movimiento. Si en lugar de tomar como referencia el propio automóvil (sistema de referencia no inercial) para medir la aceleración que sufren sus ocupantes, tomamos como referencia el suelo de la carretera (sistema de referencia inercial), y determinamos la trayectoria del automóvil, vemos que la variación de velocidad le sucede al coche y que el pasajero se limita a seguir su inercia según la primera ley de Newton.
Contenido
Fuerzas ficticias en mecánica newtoniana
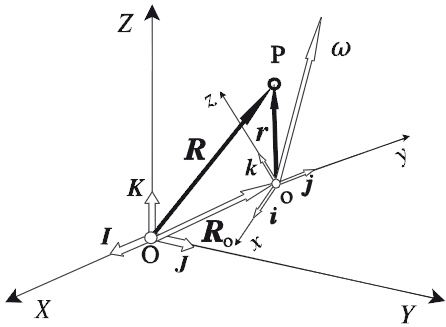
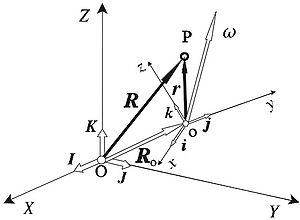 Sistemas de referencia en rotación relativa. Si el referencial XYZ es inercial, el referencial xyz será no inercial.
Sistemas de referencia en rotación relativa. Si el referencial XYZ es inercial, el referencial xyz será no inercial.En un sistema de referencia no-inercial la aceleración que posee un objeto tiene componentes que no son atribuibles a fuerzas reales, a ningún agente físico.
Así, la aceleración de una partícula en un sistema referencial fijo o absoluto
 y en un sistema referencial móvil o relativo,
y en un sistema referencial móvil o relativo,  , están relacionadas mediante la expresión:
, están relacionadas mediante la expresión:(1)

siendo:
- la aceleración de la partícula en el referencial fijo
(aceleración absoluta).
- la aceleración de la partícula en el referencial móvil (aceleración relativa),
 la aceleración del origen del referencial móvil en
la aceleración del origen del referencial móvil en
el referencial fijo (arrastre de traslación),
 la aceleración tangencial (arrastre de rotación),
la aceleración tangencial (arrastre de rotación), la aceleración normal o centrípeta (arrastre de rotación),
la aceleración normal o centrípeta (arrastre de rotación), la aceleración complementaria o aceleración de Coriolis.
la aceleración complementaria o aceleración de Coriolis.
Si observamos el movimiento de la partícula desde el referencial acelerado (no-inercial), deberemos ser capaces de escribir correctamente las ecuaciones del movimiento en ese mismo referencial. Esto es, deberemos conocer la forma del producto
 en ese referencial, siendo
en ese referencial, siendo  la masa de la partícula.
la masa de la partícula.Es conveniente comenzar escribiendo la ecuación del movimiento en un referencial inercial; esto es,
(2)

donde
 es la resultante de las fuerzas reales que actúan sobre la partícula y
es la resultante de las fuerzas reales que actúan sobre la partícula y  es la aceleración de dicha partícula respecto al referencial inercial. Como no siempre será posible medir esa aceleración, sustituiremos en [2] el valor de dado por [1]:
es la aceleración de dicha partícula respecto al referencial inercial. Como no siempre será posible medir esa aceleración, sustituiremos en [2] el valor de dado por [1]:(3)

de donde podemos obtener la ecuación del movimiento en el referencial no-inercial sin más que aislar en el segundo miembro el término
, esto es,(4)

de modo que a la fuerza real
hay que añadirle unas fuerzas ficticias o inerciales que aparecen en los referenciales acelerados en razón de su falta de inercialidad. La fuerza ficticia total en el referencial no-inercial es(5)

y la fuerza efectiva que actúa sobre la partícula, desde el punto de vista del observador no-inercial, es la suma de la fuerza o fuerzas reales y de la fuerza ficticia o inercial total. De este modo, podemos escribir la ecuación del movimiento en el referencial no-inercial en forma análoga a como se escribe en el referencial inercial, esto es
(5)

con
(6)

En la expresión de la fuerza ficticia total aparecen cuatro términos, o sea, cuatro fuerzas inerciales, relacionadas con las aceleraciones
,  ,
,  , y
, y  , respectivamente. La primera de estas fuerzas inerciales está relacionada con el movimiento de traslación acelerado del referencial móvil respecto al fijo, y será nula, evidentemente, si el origen del referencial móvil está en reposo en el referencial fijo o se mueve con velocidad contante en él. La segunda de estas fuerzas no recibe ningún nombre especial y sólo aparece en los referenciales en rotación no uniforme; la tercera y cuarta, reciben los nombres de fuerza centrífuga y de fuerza de Coriolis, respectivamente. Estas dos fuerzas son de gran importancia cuando las observaciones se realizan desde un referencial ligado a la Tierra (en rotación) y están asociadas con la desviación de la plomada y de la trayectoria de proyectiles de gran alcance.
, respectivamente. La primera de estas fuerzas inerciales está relacionada con el movimiento de traslación acelerado del referencial móvil respecto al fijo, y será nula, evidentemente, si el origen del referencial móvil está en reposo en el referencial fijo o se mueve con velocidad contante en él. La segunda de estas fuerzas no recibe ningún nombre especial y sólo aparece en los referenciales en rotación no uniforme; la tercera y cuarta, reciben los nombres de fuerza centrífuga y de fuerza de Coriolis, respectivamente. Estas dos fuerzas son de gran importancia cuando las observaciones se realizan desde un referencial ligado a la Tierra (en rotación) y están asociadas con la desviación de la plomada y de la trayectoria de proyectiles de gran alcance.Vemos que la "aparición" de las fuerzas de inercia se debe a una simple operación algebrica consistente en cambiar de miembro cuatro términos en la expresión (3) para pasar a la (4). Esos términos que representaban productos de componentes de la aceleración por la masa de la partícula, al cambiarlos de miembro "adquieren" la categoría de fuerzas, sin serlo, ya que no representan interacción alguna. De ahí que sean fuerzas ficticias o falsas.
En mecánica newtoniana, la ecuación fundamental del movimiento
 sólo es de aplicación en sistemas de referencia inerciales. Cuando resulta útil, conveniente o inevitable tratar un problema en un sistema de referencia no-inercial, para mantener la aplicabilidad de dicha ecuación debemos considerar junto con las fuerzas reales las fuerzas ficticias o de inercia asociadas con la no-inercialidad del sistema de referencia.
sólo es de aplicación en sistemas de referencia inerciales. Cuando resulta útil, conveniente o inevitable tratar un problema en un sistema de referencia no-inercial, para mantener la aplicabilidad de dicha ecuación debemos considerar junto con las fuerzas reales las fuerzas ficticias o de inercia asociadas con la no-inercialidad del sistema de referencia.Fuerzas ficticias en mecánica lagrangiana
La formulación lagrangiana de la mecánica clásica tiene la virtud de que es aplicable sin modificaciones a sistemas no inerciales. En mecánica lagrangiana puede darse una definición intrínseca de sistema inercial: «Un sistema es no inercial cuando la derivada temporal del momento generalizado, no depende de las velocidades.» Las fuerzas ficticias son siempre términos dependientes de las velocidades, así dado un sistema de coordenadas generalizadas cualquiera las fuerzas ficticias asociadas. El cálculo de las fuerzas ficticias, es muy sencillo usando la formulación lagrangiana, para ilustrarlo, consideremos un sistema no-inercial usado para describir el movimiento de una partícula de masa m. Su lagrangiano será igual a la energía cinética que puede escribirse como:

Introduciendo este lagrangiano en las ecuaciones del movimiento de Euler-Lagrange

La ecuación anterior de hecho puede, usando la simetría del tensor métrico y usando la definición de los símbolos de Christoffel se comprueba que las fuerzas ficticias son proporcionales a estas cantidades:
(*)

Donde se han definido los símbolos de Christoffel como a partir de las derivadas del tensor métrico y el tensor inverso del tensor métrico:
Puede verse claramente como la fuerza ficticia aparece automáticamente en el formalismo de Lagrange cuando se usa un sistema de coordenadas no cartesianas. En un sistema de referencia inercial asociado a un sistema de coordenadas cartesianas los símbolos de Christoffel se anulan, lo cual equivale a que en dicho sistema no hay que considerar fuerzas ficticias y la ecuación de Euler-Lagrange del movimiento se reduce a la segunda ley de Newton.
Fuerzas ficticias en la mećanica relativista
En la teoría de la relatividad general debida al requerimiento explícito de que la forma de las ecuaciones sea explícitamente forminvariante en todos los sistemas de coordenadas físicamente admisibles, la segunda ley de Newton tiene ya la forma adecuada que incorpora el efecto de lo que en mecánica newtoniana se consideran fuerzas ficticias. Por tanto en relatividad general no se habla de fuerzas ficticias. La versión relativista de la segunda ley de Newton es:
Donde se han empleado los símbolos de Christoffel y las derivadas se realizan respecto al tiempo propio de la partícula.Véase también
- Fuerza centrífuga
- Fuerza de Coriolis
- Aceleración absoluta
- Aceleración relativa
Referencias
Bibliografía
- Feynman, Leighton and Sands (en inglés). Lectures on physics. Addison-Wesley. ISBN 0-8053-9045-6.
- Marion, Jerry B. (1996) (en español). Dinámica clásica de las partículas y sistemas. Barcelona: Ed. Reverté. ISBN 84-291-4094-8.
- Ortega, Manuel R. (1989-2006) (en español). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN 84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.
Enlaces externos




Wikimedia foundation. 2010.