- Precesión
-
Precesión
 Movimiento de precesión de un trompo o peonza.
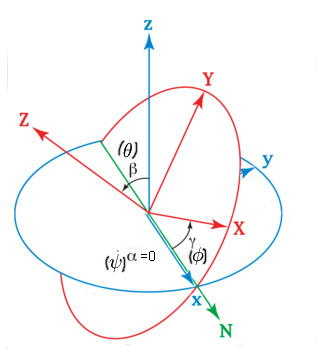
Movimiento de precesión de un trompo o peonza.La precesión o movimiento de precesión es el movimiento asociado con el cambio de dirección en el espacio que experimenta el eje instantáneo de rotación de un cuerpo.
El paradigma de precesión lo tenemos en el caso del movimiento que realiza una peonza o trompo en rotación. Cuando su eje de rotación no es vertical, la peonza presenta un movimiento de añadido que identificamos con la precesión.
Más exactamente una precesión pura es aquel movimiento del eje de rotación que mantiene su segundo ángulo de Euler (nutación) constante. Este movimiento también se da en el eje de la tierra durante el movimiento de nutación.
Hay dos tipos de precesión: la precesión debida a los momentos externos, y la precesión sin momentos de fuerzas externos.
Contenido
Precesión sin momentos externos
Este movimiento ocurre cuando un cuerpo está en movimiento alrededor de un eje que no es ni el eje de máximo momento de inercia ni el eje de menor momento de inercia. La precesión puede estar acompañada de otros movimientos propios de los cuerpos en rotación como la nutación Hay un tipo especial de curvas sobre la superficie del objeto, llamadas polhode y herpolhode [1], las cuales describen el movimiento del mismo.
Precesión debida a momentos externos
Precesión un sólido de revolución
Se llama peonza simétrica en movimiento libre a un sólido rígido de revolución, con dos de sus momentos de inercia principales iguales
 . Como en una peonza simétrica se pueden escoger arbitrariamente los ejes 1 y 2, conviene aprovechar ese hecho para simplificar las expresiones tomando el eje 1 paralelo a la línea nodal de los ángulos de Euler lo cual equivale a que ψ = 0.
. Como en una peonza simétrica se pueden escoger arbitrariamente los ejes 1 y 2, conviene aprovechar ese hecho para simplificar las expresiones tomando el eje 1 paralelo a la línea nodal de los ángulos de Euler lo cual equivale a que ψ = 0.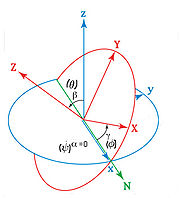 Ángulos usados para describir la orientación de la peonza
Ángulos usados para describir la orientación de la peonza
Lo cual lleva a que las velocidades angulares en el sistema de referencia no inercial vengan dadas por:
La energía cinética de rotación una peonza simétrica puede expresarse en términos de los ángulos de Euler sencillamente:

Por otro lado si se toma el eje Z del sistema de referencia alineado con el momento angular del sólido rígido se tiene que las componentes del momento angular y la relación con la velocidad angular son:

Escribiendo componente a componente estas ecuaciones se tiene que:

La primera ecuación nos dice que en el movimiento libre de una peonza simétrica ésta no cabecea; es decir, no hay movimiento de nutación ya que el ángulo formado por eje de rotación y el momento angular se mantiene constante en el movimiento. La segunda describe el movimiento de precesión de acuerdo con el cual el eje de rotación (que coincide con la dirección de la velocidad angular) gira alrededor de la dirección del momento angular (eje Z). La tercera ecuación da la velocidad de rotación del sólido alrededor de su tercer eje de inercia.
Giroscopio
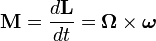
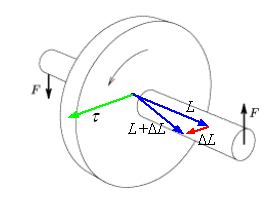 Todos los vectores del dibujo están en un plano horizontal. Como el momento dinámico
Todos los vectores del dibujo están en un plano horizontal. Como el momento dinámico aplicado al cuerpo es perpendicular al momento angular
aplicado al cuerpo es perpendicular al momento angular  , este último cambia únicamente de dirección. Ese cambio es la precesión.
, este último cambia únicamente de dirección. Ese cambio es la precesión.Recordemos que el momento angular es un vector que tiene como módulo, el producto del momento de inercia del cuerpo alrededor del eje de rotación, multiplicado por la velocidad angular. La dirección del vector es la misma que la del vector asociado a la velocidad angular y está dada por la regla del sacacorchos. La ecuación de base del momento angular de un cuerpo es:

donde
es el momento angular del cuerpo y  es le torque aplicado al cuerpo. Esta ecuación corresponde, en el movimiento lineal, a la ecuación
es le torque aplicado al cuerpo. Esta ecuación corresponde, en el movimiento lineal, a la ecuación  donde
donde  es la fuerza aplicada a un cuerpo y
es la fuerza aplicada a un cuerpo y  es el momento lineal del cuerpo.
es el momento lineal del cuerpo.Cuando el momento dinámico es paralelo al momento angular, o sea, paralelo al eje de rotación, el único efecto del momento dinámicoes de acelerar o frenar la velocidad de rotación del objeto. En cambio, una componente del torque, perpendicular al eje de rotación, no cambia el módulo de la velocidad angular sino su dirección, es decir la dirección del eje de rotación del cuerpo.
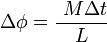
Consideremos el cuerpo en rotación de la imagen de derecha. Cuando se le aplica un momento dinámicocomo el indicado por las fuerzas dibujadas, la dirección de la variación del momento angular es la indicada en el dibujo. Esta variación es perpendicular al momento angular y paralela al torque. La variación de
durante un intervalo de tiempo  es:
es:
Nótese que
 tiene la misma dirección que . Si el intervalo de tiempo es pequeño, el ángulo
tiene la misma dirección que . Si el intervalo de tiempo es pequeño, el ángulo  que el nuevo momento angular
que el nuevo momento angular  hace con el precedente es:
hace con el precedente es:La velocidad de precesión del giroscopio es la velocidad angular del vector
que es la misma que la del eje de rotación de este último:- Velocidad de precesión
La velocidad de precesión es una velocidad angular y se mide en radianes/segundo.
La velocidad de precesión es tanto más pequeña cuanto el momento angular del cuerpo es grande.
Trompo o peonza
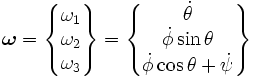
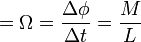
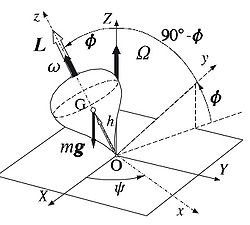 Figura 1
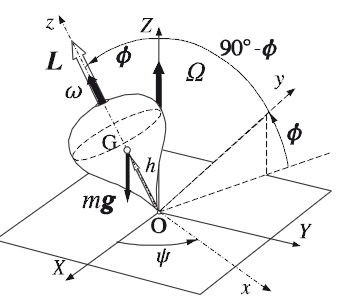
Figura 1Si el eje de rotación del trompo, z, forma un cierto ángulo
 con la vertical, como ocurre generalmente, dicho eje se mueve en el espacio generando una superficie cónica de revolución en torno al eje vertical fijo Z. Este movimiento del eje de rotación recibe el nombre de precesión de la peonza y el eje Z es el eje de precesión. Generalmente, el ángulo varía periódicamente durante el movimiento de precesión de la peonza, de modo que el eje de rotación oscila acercándose y alejándose del eje de precesión (decimos que el trompo cabecea); a este movimiento se le llama nutación y al ángulo se le llama ángulo de nutación. En el estudio elemental que sigue no tendremos en cuenta este último movimiento; i.e., consideraremos un ángulo de nutación constante.
con la vertical, como ocurre generalmente, dicho eje se mueve en el espacio generando una superficie cónica de revolución en torno al eje vertical fijo Z. Este movimiento del eje de rotación recibe el nombre de precesión de la peonza y el eje Z es el eje de precesión. Generalmente, el ángulo varía periódicamente durante el movimiento de precesión de la peonza, de modo que el eje de rotación oscila acercándose y alejándose del eje de precesión (decimos que el trompo cabecea); a este movimiento se le llama nutación y al ángulo se le llama ángulo de nutación. En el estudio elemental que sigue no tendremos en cuenta este último movimiento; i.e., consideraremos un ángulo de nutación constante.Utilizaremos dos referenciales para describir el movimiento del trompo. Uno de ellos es el referencial fijo XYZ, con origen en el punto O (estacionario) del eje de rotación del trompo. El otro referencial es el referencial móvil xyz, cuyo origen es también el punto O (estacionario). Haremos coincidir el eje z con el eje de rotación del trompo; el eje x lo elegimos de modo que permanezca siempre horizontal, contenido en el plano XY. El ángulo
 que forma en cada instante el eje x con el eje X recibe el nombre de [[ángulo de precesión]]. En consecuencia, el eje y estará siempre contenido en el plano definido por los ejes z y Z, como se muestra en la Figura 1, formando un ángulo con el plano XY. Obsérvese que el referencial xyz no es solidario con el trompo, i.e., no es arrastrado por la rotación de éste, sino que presenta una rotación con respecto al referencial fijo XYZ con una cierta velocidad angular
que forma en cada instante el eje x con el eje X recibe el nombre de [[ángulo de precesión]]. En consecuencia, el eje y estará siempre contenido en el plano definido por los ejes z y Z, como se muestra en la Figura 1, formando un ángulo con el plano XY. Obsérvese que el referencial xyz no es solidario con el trompo, i.e., no es arrastrado por la rotación de éste, sino que presenta una rotación con respecto al referencial fijo XYZ con una cierta velocidad angular  llamada velocidad angular de precesión.
llamada velocidad angular de precesión.Como al aplicar la ecuación del movimiento de rotación del sólido rígido, M = dL/dt, tanto el momento externo (M) como el momento angular (L) deben estar referidos a un mismo punto fijo en un referencial inercial (o al CM del cuerpo), tomaremos el punto O como origen o centro de reducción.
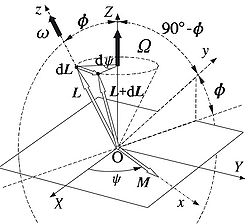 Figura 2
Figura 2Puesto que el trompo está girando, con una velocidad angular intrínseca ω, alrededor del eje principal de inercia z, su momento angular será paralelo a la velocidad angular (o sea, será paralelo al eje z), y viene dado por
(1)

Por otra parte, el momento externo que actúa sobre el trompo se debe al peso mg que actúa en el centro de gravedad G y es igual al producto vectorial
(2)

de modo que el momento externo M resulta ser perpendicular al eje de rotación, o sea que
 . El módulo del momento aplicado es
. El módulo del momento aplicado es(3)

siendo h=OG la distancia entre el punto estacionario del trompo (el extremo de su púa) y el centro de gravedad del mismo. La dirección de M es la del eje x.
Como el momento externo aplicado al trompo no es nulo, el momento angular no permanecerá constante. Durante un intervalo de tiempo infinitesimal dt el cambio infinitesimal experimentado por el momento angular vale
(4)

de modo que el cambio dL en el momento angular tiene siempre la misma dirección que el momento aplicado M (del mismo modo que el cambio en la cantidad de movimiento tiene siempre la misma dirección que la fuerza). Como el momento M es perpendicular al momento angular L, el cambio dL en el momento angular también es perpendicular a L. Por consiguiente, el vector momento angular cambia de dirección, pero su módulo permanece constante (Figura 2). Naturalmente, puesto que el momento angular tiene siempre la dirección del eje de rotación éste cambiará también su orientación en el espacio en el transcurso del tiempo.
El extremo del momento angular L describe una circunferencia, de radio
 , alrededor del eje fijo Z y en un tiempo dt dicho radio experimenta un desplazamiento angular dψ. La velocidad angular de precesión Ω se define como la velocidad angular con la que gira el eje z en torno al eje fijo Z. Esto es
, alrededor del eje fijo Z y en un tiempo dt dicho radio experimenta un desplazamiento angular dψ. La velocidad angular de precesión Ω se define como la velocidad angular con la que gira el eje z en torno al eje fijo Z. Esto es(5)

y está representado por un vector situado sobre eje Z.
Puesto que L es un vector de módulo constante que precesa alrededor del eje Z con una velocidad angular Ω, podemos escribir la ec. dif. del movimiento de rotación en la forma
(6)
obteniéndose para el módulo del momento
(7)

expresión de la que despejaremos Ω para tener
(8)

donde hemos sustituido las expresiones (1) y (2) para el momento angular y el momento, respectivamente. La velocidad angular de precesión, Ω, resulta ser inversamente proporcional al momento angular (L) o a la velocidad angular intrínseca (ω), de modo que si éste o ésta es grande, aquélla será pequeña.
Obsérvese que la velocidad angular de precesión no depende del ángulo de inclinación del trompo. Esta propiedad es muy importante en el fundamento de la resonancia magnética nuclear y de sus aplicaciones.
Pero, ¿por qué no cae el trompo? La respuesta es que la fuerza vertical ejercida sobre él por el suelo (en el extremo O de la púa) es exactamente igual al peso del trompo, de modo que la fuerza resultante vertical es nula. La componente vertical de la cantidad de movimiento permanecerá constante pero, debido a que el momento no es nulo, el momento angular cambia con el tiempo. Si el trompo no estuviera en rotación, al abandonarlo no habría momento angular y al cabo de un intervalo de tiempo infinitesimal, dt, el momento angular dL adquirido, en virtud del par de fuerzas que actúa sobre él, tendría la misma dirección que el vector M; esto es, que caería. Pero si el trompo se encuentra inicialmente en rotación, la variación del momento angular, dL, producida por el par, se suma vectorialmente al momento angular que ya tiene, y puesto que dL es horizontal y perpendicular a L, el resultado es el movimiento de precesión anteriormente descrito.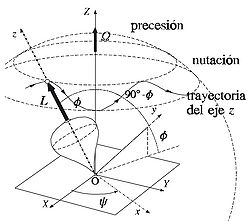 Figura 3
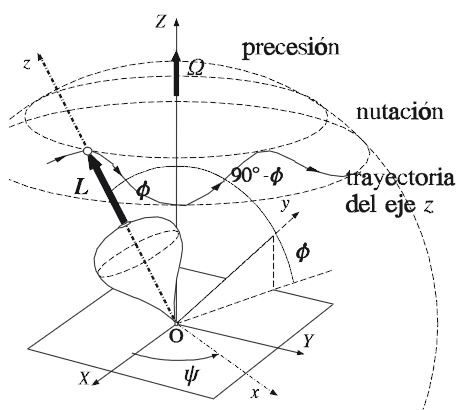
Figura 3Los resultados obtenidos en nuestra discusión del movimiento del trompo son solamente aproximados. Son correctos si ω es muy grande en comparación con Ω (situación compatible con la ec. [7]). La razón es que si el trompo está precesando en torno al eje fijo vertical Z tendrá un momento angular con respecto a dicho eje, de modo que el momento angular total no será simplemente Izzω, como supusimos. Sin embargo, si la precesión es muy lenta, el momento angular correspondiente a esa precesión puede despreciarse, como implícitamente hemos hecho en nuestros cálculos anteriores.
Por otra parte, una discusión más detallada nos mostraría que en general el ángulo de nutación
no permanece constante, sino que oscila entre dos valores fijos, de modo que el extremo del vector L, al mismo tiempo que precesa alrededor de Z, oscila entre dos círculos, como se muestra en la Figura 3, describiendo la trayectoria indicada.Para comprender el porqué de estas oscilaciones deberemos considerar el modo en que se origina el movimiento de precesión. Si inicialmente mantenemos fija la orientación del eje de rotación z (apoyando su extremo superior) el peso del trompo estará compensado por la reacción normal N en el punto O más la reacción normal en el apoyo del extremo superior del eje, de modo que resultará ser N < mg. Si una vez que el trompo ha adquirido un rápido movimiento de rotación, abandonamos el eje, entonces, aún un instante después será N < mg, de modo que tenemos una fuerza resultante vertical y dirigida hacia abajo. El trompo comienza a caer, pero en ese instante comienza la precesión. Como consecuencia del movimiento de caída, la púa del trompo se apoya en el suelo con más fuerza, de modo que aumenta la fuerza de reacción vertical N, que finalmente llegará a ser mayor que el peso. Cuando esto sucede, el centro de masa del trompo comienza a acelerar hacia arriba. El proceso se repite, y el movimiento se compone de una precesión acompañada de una oscilación del eje de rotación hacia abajo y hacia arriba, que recibe el nombre de nutación. La nutación, al igual que la precesión, contribuye al momento angular total, pero en general su contribución es aún menor que la de la precesión.
Referencias
Véase también
- Cinemática del sólido rígido
- Movimientos de la Tierra
- Nutación
- Rotación
- Eje instantáneo de rotación
- Ángulos de Euler
- Efecto Allais
Bibliografía
- Landau & Lifshitz: Mecánica, Ed. Reverté, Barcelona, 1991. ISBN 84-291-4081-10
- Feynman, Leighton and Sands. Lectures on physics (en inglés). Addison-Wesley. ISBN 0-8053-9045-6.
- Marion, Jerry B. (1996). Dinámica clásica de las partículas y sistemas (en español). Barcelona: Ed. Reverté. ISBN 84-291-4094-8.
- Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes) (en español). Monytex. ISBN 84-404-4290-4, ISBN 84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.
- Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
Enlaces externos
Categorías: Física | Mecánica | Cinemática | Precesión

Wikimedia foundation. 2010.