- Radar de impulsos Doppler
-
Radar de impulsos Doppler
 Radar pulsado
Radar pulsado
El radar Doppler pulsado es un sistema de radar capaz no sólo de medir el rumbo, distancia y altitud de un objeto, sino también de detectar su velocidad. Su sistema de localización se basa en emitir trenes de pulsos a una frecuencia determinada y utilizar el efecto Doppler para determinar la velocidad transversal relativa de los objetos. Este tipo de radares presentan ambigüedad en la medida de distancias por lo que no son muy útiles para labores de localización.
Fundamento físico
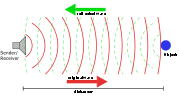
El radar Doppler se basa en el hecho de que objetos en los que existe movimiento con respecto al radar en la componente perpendicular a la dirección de iluminación producen una alteración en la frecuencia de la onda electromagnética cuando esta incide sobre ellos. Los objetos que se acerquen a la fuente influirán positivamente en la frecuencia del eco que produzcan y objetos que se alejen influirán negativamente en esta relación, siendo mayor la frecuencia de la onda emitida por la fuente que la del eco. La diferencia entre las frecuencias emitidas y recibidas permiten calcular la velocidad del objeto en movimiento.
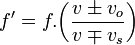
El cálculo de la velocidad se basa en el conocimiento previo de la frecuencia del radar, de la velocidad de la luz, del número de pulsos emitidos por segundo y de la diferencia entre la frecuencia emitida y la producida por su eco.
Demodulación de señales
El receptor de video procesa con filtos de velocidad doppler o circuitos de procesado de señales digitales que se usan para determinar velocidad. Los más modernos radares de pulsos Doppler demodulan las señales de entrada de radiofrecuencia hacia una frecuencia central en cero, anterior al muestreo digital. Eso se hace para reducir sesgos computacionales, ya que la señal demodulada puede ser rebajada pesadamente y así reducir el monto de datos necesarios de almacenar. La señal resultante es usualmente referida a complejo demodulado, o IQ-data, donde IQ da en-fase y en cuadratura-fase, reflejando el hecho de que la señal es un número complejo, con una parte real y otra imaginaria.
Por ejemplo, una señal modulada puede ser S(t) = cos(ω0t + φ(t)), y luego puede ser demodulada usando:
- IH(t) = S(t)cos(ω0t) y QH(t) = S(t)sin(ω0t)
Usando un filtro de bajo paso en ambos IH(t) y en QH(t) permite lo siguiente:
- I(t) = cos(φ(t) + Φ) y Q(t) = sin(φ(t) + Φ)
Note que I(t) no sería suficiente debido a que la señal se pierde. Teniendo a I(t) y a Q(t) permitirá al radar apropiadamente mapear y proveer velocidades Doppler.
Enlaces externos
- Radar Doppler, presentación, con las ventajas de usar la técnica de autocorrelación
- Pulse-Doppler radar handouts from Introduction to Principles and Applications of Radar course at University of Iowa
- Modern Radar Systems por Hamish Meikle (ISBN 0-86341-172-X)
- Advanced Radar Techniques and Systems; editado por Gaspare Galati (ISBN 1-58053-294-2)
Categoría: Radares

Wikimedia foundation. 2010.