- Radar
-
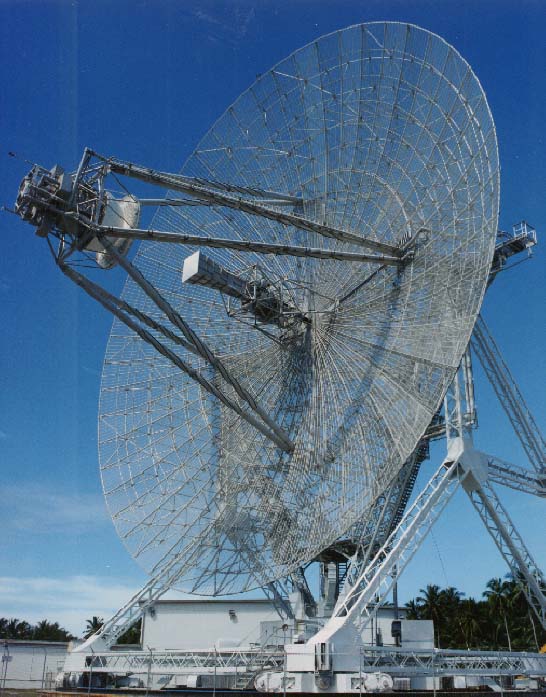
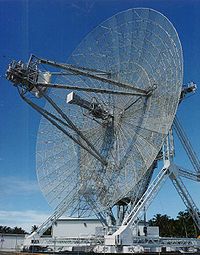 Antena de radar de detección a larga distancia
Antena de radar de detección a larga distancia
El radar (término derivado del acrónimo inglés radio detection and ranging, “detección y medición de distancias por radio”) es un sistema que usa ondas electromagnéticas para medir distancias, altitudes, direcciones y velocidades de objetos estáticos o móviles como aeronaves, barcos, vehículos motorizados, formaciones meteorológicas y el propio terreno. Su funcionamiento se basa en emitir un impulso de radio, que se refleja en el objetivo y se recibe típicamente en la misma posición del emisor. A partir de este "eco" se puede extraer gran cantidad de información. El uso de ondas electromagnéticas permite detectar objetos más allá del rango de otro tipo de emisiones (luz visible, sonido, etc.)
Entre sus ámbitos de aplicación se incluyen la meteorología, el control del tráfico aéreo y terrestre y gran variedad de usos militares.
Contenido
Historia
- En 1864, James Clerk Maxwell describe las leyes del electromagnetismo.
- En 1888, Heinrich Rudolf Hertz demuestra que las ondas electromagnéticas se reflejan en las superficies metálicas.
- Durante el Siglo XX, muchos inventores, científicos e ingenieros han contribuido en el desarrollo del radar, impulsados sobre todo por el ambiente prebélico que precedió a la Segunda Guerra Mundial, y a la propia Guerra. Los grandes países que participaron en ella fueron desarrollando de forma paralela distintos sistemas radar, aportando grandes avances cada uno de ellos para llegar a lo que hoy conocemos sobre los sistemas radar.
- En 1904 Christian Huelsmeyer patenta el primer sistema anticolisión de buques utilizando ondas electromagnéticas
- Desarrollo de la radio y de la transmisión inalámbrica (por Guglielmo Marconi, entre otros), gracias a lo cual se desarrollan las antenas.
- En 1917, Nikola Tesla establece los principios teóricos del futuro radar (frecuencias y niveles de potencia).
- En 1934, y gracias a un estudio sistemático del magnetrón, se realizan ensayos sobre sistemas de detección de onda corta siguiendo los principios de Nikola Tesla. De este modo nacen los radares de ondas decimétricas.
Años previos a la Segunda Guerra Mundial
Alemania
En 1934 el GEMA (Gesellschaft für Elektroakustische und Mechanische Apparate), uno de cuyos fundadores fue Hans Hollmann, construye un magnetrón capaz de trabajar a 650 MHz. Ése fue el paso tecnológico que permitió el desarrollo del Freya, un radar de vigilancia aérea que trabajaba a 125 MHz con un alcance entre 80 y 150 millas. Era un radar para trabajar en superficie por sus dimensiones, por ello, una versión posterior fue el Seetakt que trabajaba a 375 MHz y tenía un alcance de 10 millas adaptado para ser montado en buques. Este radar fue utilizado en el verano de 1938 en la Guerra Civil Española.
La competencia en la industria alemana de la época hizo que, en el año 1935, la empresa alemana Telefunken lanzara un radar de antena parabólica giratoria, antecesor del radar de alerta aérea Würzburg, radar de tiro de 560 MHz de trabajo y con deflector de 3m de diámetro.
El Freya y el Würzburg fueron la base de la defensa terrestre de los alemanes durante la Segunda Guerra Mundial, y el Steetakt pieza fundamental para la de detección a bordo de los buques de la Armada Alemana. Al inicio de la Segunda Guerra Mundial, Alemania estaba al frente de la tecnología de radares, pero su decisión de alistar a científicos e ingenieros en el frente, pensando que la guerra sería corta y satisfactoria, hizo que no se produjeran avances sustanciosos en esos años, en contramedida de sus adversarios, que siguieron avanzando.
Gran Bretaña
El modelo de radar actual fue creado en 1935 y desarrollado principalmente en Inglaterra durante la Segunda Guerra Mundial por el físico Robert Watson-Watt. Supuso una notable ventaja táctica para la Royal Air Force en la Batalla de Inglaterra, cuando aún era denominado RDF (Radio Direction Finding). Aunque fue desarrollado con fines bélicos, en la actualidad cuenta con multitud de usos civiles, siendo la mejor herramienta para el control de tráfico aéreo.
En los momentos anteriores a la II Guerra Mundial, Robert Watson-Watt, físico y director del Laboratorio de Investigación de Radio y su ayudante, el físico Arnold Wilkins, estuvieron a cargo de la invención de un “rayo de la muerte” que sería utilizado en esa guerra. La idea de Watson-Watt era elevar la temperatura del piloto atacante a 41 °C aproximadamente para que, al provocarle fiebre, quedara incapacitado.
Como lo escribió el propio Wilkins:
Mi cálculo mostró que, como era de esperarse, se necesitaba generar una potencia enorme a cualquier frecuencia de radio para producir fiebre en el cuerpo de un piloto de avión, aun en el improbable caso de que su cuerpo no estuviera protegido por el metal del fuselaje [...]. Como nada cercano a dicha potencia se podía producir, estaba claro que no era factible un rayo de la muerte por medio de la radio. Le dije esto a Watson-Watt al darle mi cálculo y me respondió: "Bien, si un rayo de la muerte no es posible, ¿cómo podemos entonces ayudarles? Yo contesté que los ingenieros de la Oficina de Correos se habían dado cuenta de perturbaciones en la recepción de muy altas frecuencias cuando algún avión volaba en la vecindad de sus receptores y que este fenómeno podría ser útil para detectar aviones enemigos"Esta observación, hecha en enero de 1935, dio lugar una serie de hechos que culminaron con la invención del radar. Los hechos a los que Wilkins se refirió habían sido observados en muchos lugares y en todos se consideró esta perturbación como un estorbo que mucha gente había tratado de eliminar. De hecho, en 1932, la Oficina Postal Británica publicó un informe en el que sus científicos documentaron fenómenos naturales que afectaban la intensidad de la señal electromagnética recibida: tormentas eléctricas, vientos, lluvia y el paso de un aeroplano en la vecindad del laboratorio. Wilkins conoció este informe de manera accidental, conversando con la gente de la Oficina Postal, que se quejaba por la interferencia.
Cuando Wilkins sugirió la posibilidad de utilizar el fenómeno de interferencia de ondas de radio para detectar aviones enemigos, Watson-Watt lo comisionó inmediatamente para trabajar en el cálculo de los aspectos cuantitativos.
Al terminar sus cálculos, a Wilkins le pareció increíble que el efecto deseado pudiera detectarse; revisó sus cálculos, no encontró ningún error y se los dio a Watson-Watt, quien los vio fantásticos y verificó los cálculos matemáticos. Al no encontrar error, envió los resultados. El hecho de que un rayo de la muerte no fuera factible no sorprendió, sin embargo atrajo la idea de poder detectar un avión.
EEUU
Dos científicos del Naval Research Laboratory (NRL) Hoyt Taylor y L. Young dieron forma a las especulaciones de Marconi y las plasmaron en un experimento en el que transmitieron una señal de radio de onda continua a través del río Potomac detectando que al pasar los buques se producían alteraciones en la calidad de la señal recibida. Lograron perturbaciones con distancias de hasta tres millas. Observando esto, concluyeron con que se podría diseñar un elemento que detectara buques en el mar.
Al mismo tiempo, la Armada de los EE.UU. se encontraba muy ocupada dotando a los buques de comunicaciones sin hilos. A pesar de esto, se continuó con su investigación a nivel científico en muchos campos. Es así que el NRL, en cooperación con el Carnegie Institute , durante el año 1925 investigó la reflexión de ondas en la ionosfera y la modulación por pulsos de la onda, de tal manera que conociendo el instante de salida de un pulso y midiendo su retardo se podría calcular la distancia del rebote. A partir de estas investigaciones se diseñó a principio de los años 30 el primer radar de impulsos, obteniéndose los primeros pulsos reflejados por aviones en diciembre de 1934. Aunque no fue hasta julio de 1936 cuando consiguieron que funcionara correctamente, debido a un error en el diseño del ancho de banda del receptor (demasiado estrecho). El radar trabajaba a 200 MHz con una anchura de pulso de 10µs. Este radar utilizaba una única antena en emisión y recepción pues incluía el primer duplexor, una novedad tecnológica que supuso una gran diferencia entre países durante varios años.
Principios
Reflexión
Las ondas electromagnéticas se dispersan cuando hay cambios significativos en las constantes dieléctricas o diamagnéticas. Esto significa que un objeto sólido en el aire o en el vacío (es decir, un cambio en la densidad atómica entre el objeto y su entorno) producirá dispersión de las ondas de radio, como las del radar. Esto ocurre particularmente en el caso de los materiales conductores como el metal y la fibra de carbono, lo que hace que el radar sea especialmente indicado para la detección de aeronaves. En ocasiones los aviones militares utilizan materiales con sustancias resistivas y magnéticas que absorben las ondas del radar, reduciendo así el nivel de reflexión. Estableciendo una analogía entre las ondas del radar y el espectro visible, estos materiales equivaldrían a pintar algo con un color oscuro.
La reflexión de las ondas del radar varía en función de su longitud de onda y de la forma del blanco. Si la longitud de onda es mucho menor que el tamaño del blanco, la onda rebotará del mismo modo que la luz contra un espejo. Si por el contrario es mucho más grande que el tamaño del blanco, lo que ocurre es que este se polariza (separación física de las cargas positivas y negativas) como en un dipolo (véase: Dispersión de Rayleigh). Cuando las dos escalas son similares pueden darse efectos de resonancia. Los primeros radares utilizaban longitudes de onda muy elevadas, mayores que los objetivos; las señales que recibían eran tenues. Los radares actuales emplean longitudes de onda más pequeñas (de pocos centímetros o inferiores) que permiten detectar objetos del tamaño de una barra de pan.
Las señales de radio de onda corta (3 kHz-30 MHz) se reflejan en las curvas y aristas, del mismo modo que la luz produce destellos en un trozo de cristal curvo. Para estas longitudes de onda los objetos que más reflejan son aquellos con ángulos de 90º entre las superficies reflectivas. Una estructura que conste de tres superficies que se juntan en una esquina (como la de una caja) siempre reflejará hacia el emisor aquellas ondas que entren por su abertura.
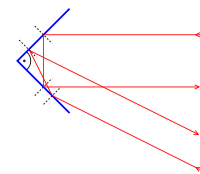 Reflector de esquina
Reflector de esquinaEste tipo de reflectores, denominados reflectores de esquina (corner reflectors, ver imagen a la derecha), se suelen usar para hacer "visibles" al radar objetos que en otras circunstancias no lo serían (se suelen instalar en barcos para mejorar su detectabilidad y evitar choques). Siguiendo el mismo razonamiento, si se desea que una nave no sea detectada, en su diseño se procurará eliminar estas esquinas interiores, así como superficies y bordes perpendiculares a las posibles direcciones de detección. De ahí el aspecto extraño de los aviones "stealth" (avión furtivo). Todas estas medidas no eliminan por completo la reflexión debido a la difracción, especialmente para longitudes de onda grandes. Otra contramedida habitual es arrojar cables y tiras metálicas cuyo largo es media longitud de onda (chaffs) con la idea de cegar al radar; son efectivas, si bien la dirección hacia la que se reflejan las ondas es aleatoria cuando lo óptimo sería dirigir la reflexión hacia el radar que se quiere evitar. El factor que da la medida de cuánto refleja un objeto las ondas de radio se llama "sección radar cruzada" (σ), traducción del inglés RCS ("Radar Cross Section").
Ecuación radar
La potencia Pr reflejada a la antena de recepción está dada por la ecuación radar:
donde
- Pt = potencia transmitida
- Gt = ganancia de la antena de transmisión
- Ar = apertura efectiva (área) de la antena de recepción
- σ = sección transversal del radar, o coeficiente de decaimiento del objetivo
- F = factor de propagación del patrón
- Rt = distancia del transmisor al objetivo
- Rr = distancia del objetivo al receptor.
En el caso común donde el transmisor y el receptor están en el mismo lugar, Rt = Rr y el término Rt² Rr² puede ser reemplazado por R4, donde R es la distancia. Esto resulta en:
Esto dice que la potencia en el receptor se reduce proporcionalmente a la cuarta potencia de la distancia, lo que significa que la potencia reflejada desde el objetivo distante es muy muy pequeña.
La ecuación anterior con F = 1 es una simplificación para el vacío sin interferencia. El factor de propagación engloba los efectos de la propagación multicamino y del shadowing, y depende del entorno en el que se estén propagando las ondas. En una situación real los efectos de atenuación en el recorrido deben ser considerados.
Otros desarrollos matemáticos en procesamiento de señales de radar incluyen análisis de tiempo-frecuencia (Weyl Heisenberg o wavelet), así como la transformada chirplet que se basa en el hecho de que los ecos devueltos por blancos móviles varían su frecuencia en función del tiempo, como lo hace el sonido de un ave o un murciélago.
Polarización
El campo eléctrico de la señal que emite un radar es perpendicular a la dirección de propagación. La dirección de dicho campo determina la polarización de la onda. Los radares usan polarizaciones horizontales, verticales, lineales o circulares, en función de la aplicación. Por ejemplo, la polarización circular es adecuada para minimizar la interferencia causada por la lluvia (pero debe evitarse para radares meteorológicos que lo que buscan es cuantificar las precipitaciones). La lineal permite detectar superficies de metal. La polarización aleatoria es adecuada para detectar superficies irregulares como rocas y se usa en radares de navegación.
Interferencias
Los sistemas radar deben hacer frente a la presencia de diferentes tipos de señales indeseadas y conseguir centrarse en el blanco que realmente interesa. Dichas señales espurias pueden tener su origen en fuentes tanto internas como externas y pueden ser de naturaleza pasiva o activa. La capacidad del sistema radar de sobreponerse a la presencia de estas señales define su relación señal/ruido (SNR). Cuanto mayor sea la SNR del sistema, tanto mejor podrá aislar los objetivos reales de las señales de ruido del entorno.
Ruido
El ruido es una fuente interna de variaciones aleatorias de la señal, generado en mayor o menor medida por todos los componentes electrónicos. Típicamente se manifiesta en variaciones aleatorias superpuestas a la señal de eco recibida en el radar.
Cuanta menor sea la potencia con que llega la señal de interés, más difícil será diferenciarla del fondo de ruido. Por tanto, la más importante fuente de ruido aparece en el receptor, por lo que debe dedicarse un gran esfuerzo a tratar de minimizar estos factores. La figura de ruido es una medida del ruido producido por el receptor en comparación con un receptor ideal y debe ser minimizada.
El ruido también puede estar causado por fuentes externas al sistema, siendo sobre todo de gran impacto la radiación térmica natural del entorno que rodea al blanco que se desea detectar. En sistemas radar modernos, debido al gran rendimiento de sus receptores, el ruido interno es típicamente igual o menor que el externo. Una excepción es el caso en el que el radar está dirigido al cielo abierto; en este caso apenas se produce ruido de Johnson-Nyquist, también conocido como ruido térmico.
Clutter
El término clutter hace referencia a todos aquellos ecos (señales de RF) recibidos por el radar que son, por definición, no deseados. Pueden estar causados por objetos del entorno, el mar, precipitaciones (lluvia, nieve o granizo), tormentas de arena, animales (especialmente pájaros), turbulencias atmosféricas y otros efectos atmosféricos como reflexiones ionosféricas y estelas de meteoritos. También puede haber clutter debido a objetos fabricados por el hombre, sin intención de engañar al radar (edificios) o con ella ("chaffs").
Algunas veces el clutter está causado por una longitud excesiva de la guía de onda que conecta el transceptor del radar y la antena. En un radar de tipo PPI (representación de distancia en función del azimut) con antena giratoria, este clutter se verá como un destello en el centro de la pantalla. En este caso el receptor estaría interpretando ecos de partículas de polvo y señales de RF indeseadas que vagan por la guiaonda. Este tipo de clutter se reduce reajustando el lapso entre el envío del pulso por parte del transmisor y el instante en que se activa la etapa de recepción. La explicación para esto es que la mayor parte de estos brillos están causados por el propio pulso transmitido antes de abandonar la antena.
Se puede dar la circunstancia de que una determinada fuente de clutter sea indeseable para una aplicación radar (ej: nubarrones en un radar de defensa aérea) pero positiva para otra (meteorológica). El clutter es considerado una fuente pasiva de interferencias, ya que sólo aparece como respuesta a los pulsos enviados por el radar.
Hay bastantes métodos para detectar y neutralizar el clutter. Muchos de ellos se fundamentan en el principio de que el clutter apenas varía entre diferentes barridos del radar. Por tanto, al comparar barridos consecutivos se comprobará que el blanco real se mueve, mientras que los ecos de clutter son estacionarios. El clutter marítimo se puede reducir empleando polarización horizontal, mientras que el de la lluvia se reduce con polarizaciones circulares (nótese que los radares meteorológicos utilizan polarización lineal porque lo que les interesa es precisamente detectar la lluvia). Otros métodos se centran en reducir la relación señal/clutter.
El método CFAR es otra técnica basada en el hecho de que los ecos debidos al clutter son mucho más numerosos que los ecos producidos por objetivos de interés. Este método permite mantener un valor constante de la probabilidad de falsa alarma haciendo un promediado adaptativo del nivel real de ruido y ajustando automáticamente la ganancia del receptor. Si bien esto no ayuda cuando el blanco está rodeado por clutter muy fuerte, puede permitir identificar objetivos más o menos claros. En radares actuales este proceso está controlado por software. Es beneficioso en sistemas en los que sea crítico mantener una determinada probabilidad de falsa alarma.
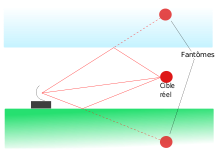 El multitrayecto de la señal de eco hace que el radar detecte "blancos fantasma"
El multitrayecto de la señal de eco hace que el radar detecte "blancos fantasma"Finalmente, también hay clutter originado por la multitrayectoria de la señal de eco de un objetivo válido. Los factores que pueden causar estos caminos múltiples son la reflexión terrestre y las refracciones atmosférica e ionosférica. Este clutter es especialmente molesto, ya que parece moverse y se comporta como si fuera un blanco de interés real, de modo que el radar detecta un objetivo "fantasma" que en realidad no existe. En un escenario típico, un blanco fantasma causado por reflexión terrestre sería interpretado por el radar como un objetivo idéntico al real situado justo por debajo de este. El radar puede intentar unificar los objetivos considerando que el blanco fantasma está a una altura incorrecta o directamente eliminarlo por considerar que está causado por jitter o que su ubicación es físicamente imposible. Una buena opción para minimizar el impacto de este efecto es incorporar al radar un mapa topográfico de los alrededores que ayude a eliminar aquellos ecos que se detecten a alturas imposibles (por debajo del nivel del suelo o por encima de una determinada altura). En radares de control de tráfico aéreo actuales se emplean algoritmos para identificar blancos falsos comparando los ecos recibidos con otros adyacentes y calculando la probabilidad de que sea real en base a datos de altura, distancia y tiempo.
Jamming
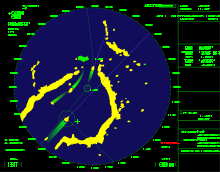 Pantalla de un radar marino.
Pantalla de un radar marino.Se conoce como jamming a aquellas señales externas al sistema radar emitidas en las frecuencias de funcionamiento del mismo y que por tanto enmascaran los objetivos de interés. Puede ser intencionado para funcionar como contramedida electrónica o fortuito (por ejemplo, fuerzas amigas cuyos sistemas de comunicaciones usan la misma banda). El jamming está considerado como una fuente activa de interferencias, ya que está originado fuera del sistema radar y en general se trata de señales sin relación alguna con este.
El jamming es muy problemático para los radares, pues suele tratarse de señales de mayor potencia que los ecos de interés (hay que tener en cuenta que la señal de interés recorre un camino de ida y vuelta radar-objetivo-radar, mientras que la señal interferente realiza solo un camino de ida). Las fuentes de jamming intencionado pueden por tanto ser efectivas emitiendo con mucha menos potencia que los radares que quieren confundir. La interferencia puede llegar al radar a través de la línea de visión directa ("Mainlobe Jamming" o "jamming de lóbulo principal") o por otros caminos ("Sidelobe Jamming" o "jamming de lóbulos secundarios o laterales").
La única manera de reducir el jamming de lóbulo principal es disminuir el ángulo sólido de dicho lóbulo (estrechar el "pincel"). Un jamming de lóbulo principal a la misma frecuencia y con la misma polarización que el radar no se puede eliminar completamente. El efecto del jamming de lóbulo lateral se puede atenuar reduciendo los lóbulos laterales del diagrama de radiación de la antena durante la fase de diseño de la misma. Una manera de conseguir esto es emplear arrays de tipo thinned o sparse. El uso de antenas omnidireccionales puede ayudar a identificar e ignorar señales que entran por los lóbulos secundarios. Otras técnicas anti-jamming son el frequency hopping o el uso de una determinada polarización, ya que si la polarización del jamming es diferente a la de la antena su efecto se ve muy reducido.
La reciente proliferación de sistemas WiFi que operan en banda C (en torno a 5,66 GHz) se ha convertido en un problema para radares meteorológicos, que sufren interferencias.[1]
Procesado de señal en un sistema radar
Medida de distancias
Tiempo de tránsito
 Radar pulsado
Radar pulsado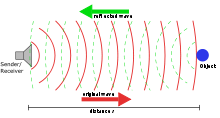
Una forma de medir la distancia entre el radar y un objeto es transmitir un pequeño pulso electromagnético y medir el tiempo que tarda el eco en volver. La distancia será la mitad del tiempo de tránsito multiplicado por la velocidad del pulso (300.000 km/s):
- r = distancia estimada
- c = velocidad de la luz
- t = tiempo de tránsito
Una estimación precisa de la distancia exige una electrónica de elevado rendimiento. La mayor parte los radares usan la misma antena para enviar y recibir, separando la circuitería de transmisión y recepción mediante un circulador o duplexor. Por ello, mientras se está transmitiendo el pulso no se puede recibir ningún eco. Esto determina la llamada "distancia ciega" del radar, por debajo de la cual éste es inútil. Esta distancia viene dada por:
- rBLIND = distancia ciega
- c = velocidad de la luz
- τ = tiempo que se tarda en transmitir un pulso
Si se quiere detectar objetos más cercanos hay que transmitir pulsos más cortos. Del mismo modo, hay un rango de detección máximo (llamado "distancia máxima sin ambigüedad"): si el eco llega cuando se está mandando el siguiente pulso, el receptor no podrá distinguirlo. Para maximizar el rango hay que aumentar el tiempo entre pulsos (T):
- rUNAMB = Distancia máxima sin ambigüedad
- c = Velocidad de la luz
- T = Tiempo entre dos pulsos
Hay un compromiso entre estos dos factores, siendo difícil combinar detección a corta y a larga distancia: para detectar a corta distancia hay que hacer los pulsos más cortos, lo que implica menor potencia, lo que implica ecos más débiles y por tanto menor alcance. Se puede aumentar la probabilidad de detección mandando pulsos con mayor frecuencia, pero nuevamente, esto acorta la distancia máxima sin ambigüedad. La combinación de T y τ que se elija se llama "patrón de pulsos" del radar. En la actualidad los radares pueden muchas veces cambiar su patrón de pulsos de forma electrónica, ajustando dinámicamente su rango de funcionamiento. Los más modernos funcionan disparando en el mismo ciclo dos pulsos diferentes, uno para detección a larga distancia y otro para distancias cortas.
La resolución en distancia y las características de la señal recibida en comparación con el ruido dependen también de la forma del pulso. A menudo este se modula para mejorar su rendimiento gracias a una técnica conocida como "compresión de pulsos".
Modulación en frecuencia
Otra forma de estimar distancias en un radar se basa en la modulación en frecuencia. La comparación de la frecuencia de señales es por norma más precisa y sencilla que la comparación de tiempos. Por eso, lo que se hace es emitir una señal (una sinusoide) a una frecuencia que va variando de forma constante en el tiempo, de modo que cuando llega el eco, su frecuencia será diferente de la de la señal original; comparándolas se puede saber cuánto tiempo ha transcurrido y por tanto cuánta distancia hay hasta el blanco. A mayor desvío en frecuencia mayor distancia.
Esta técnica puede emplearse en radares de onda continua (CW, en lugar de a pulsos se transmite todo el tiempo) y a menudo se encuentra en altímetros a bordo de aviones. La comparación en frecuencias es similar que la que se usa para medir velocidades (ver subapartado siguiente). Algunos sistemas que usan esta técnica son el AZUSA, el MISTRAM y el UDOP.
Medida de velocidades
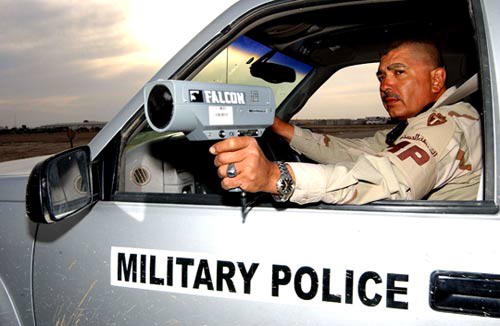
 Radar de pistola para la medición de velocidad
Radar de pistola para la medición de velocidadLa velocidad es el cambio de distancia de un objeto respecto al tiempo. Por tanto, para que un sistema radar pueda medir velocidades no hace falta más que añadirle memoria para guardar constancia de dónde estuvo el objetivo por última vez. En los primeros radares, el operador hacía marcas con un lápiz de cera en la pantalla del radar, y medía la velocidad con una regla de cálculo. Hoy día, este proceso se hace de forma más rápida y precisa usando ordenadores.
Sin embargo, si la salida del transmisor es coherente (sincronizada en fase), hay otro efecto que puede usarse para medir velocidades de forma casi instantánea sin necesidad de dotar al sistema de memoria: el efecto Doppler. Estos radares aprovechan que la señal de retorno de un blanco en movimiento está desplazada en frecuencia. Con ello, son capaces de medir la velocidad relativa del objeto con respecto al radar. Las componentes de la velocidad perpendiculares a la línea de visión del radar no pueden ser estimadas sólo con el efecto Doppler y para calcularlas sí haría falta memoria, haciendo un seguimiento de la evolución de la posición en azimut del objetivo.
También es posible utilizar radares no pulsados (CW) que funcionen a una frecuencia muy pura para medición de velocidades, como hacen los de tráfico. Son adecuados para determinar la componente radial de la velocidad de un objetivo, pero no pueden determinar distancias.
Reducción del efecto de inteferencias
Los sistemas radar usan procesado de señal para reducir los efectos de las interferencias. Estas técnicas incluyen la indicación de objetivo móvil (MTI), radares doppler pulsados, procesadores de detección de objetivos móviles (MTD), correlación con blancos de radares secundarios (SSR) y procesado adaptativo espacio-temporal (STAP). En entornos con fuerte presencia de clutter se usan técnicas CFAR y DTM.
Diseño de radares
 Componentes de un radar
Componentes de un radarUn radar consta de los siguientes bloques lógicos:
- Un transmisor que genera las señales de radio por medio de un oscilador controlado por un modulador.
- Un receptor en el que los ecos recibidos se llevan a una frecuencia intermedia con un mezclador. No debe añadir ruido adicional.
- Un duplexor que permite usar la antena para transmitir o recibir.
- Hardware de control y de procesado de señal.
- Interfaz de usuario.
Diseño del transmisor
Oscilador
El núcleo del transmisor lo forma un dispositivo oscilador. La elección de este se realiza en virtud de las características que se requieren del sistema radar (coste, vida útil, potencia de pico, longitud de los pulsos, frecuencia...) Los osciladores más utilizados son:
-
- Magnetrón: es el más utilizado a pesar de que se trata de una tecnología algo vieja. Son pequeños y ligeros. Pueden funcionar a frecuencias de entre 30 MHz y 100 GHz y proporcionan buena potencia de salida.
- Klistrón: algo más grandes que los anteriores, llegan a funcionar solamente hasta los 10 GHz. La potencia de salida que proporcionan puede quedarse corta en algunos casos.
- TWT (Tubo de ondas progresivas): para radares de 30 MHz a 15 GHz, buena potencia de salida.
Modulador
El modulador o pulsador es el elemento encargado de proporcionar pequeños pulsos de potencia al magnetrón. Esta tecnología recibe el nombre de "potencia pulsada". Gracias al modulador, los pulsos de RF que emite el oscilador están limitados a una duración fija. Estos dispositivos están formados por una fuente de alimentación de alto voltaje, una red de formación de pulsos (PFN) y un conmutador de alto voltaje (como un tiratrón).
Si en lugar de magnetrón se usa un tubo klistrón, este puede actuar como amplificador, así que la salida del modulador puede ser de baja potencia.
Diseño de la antena
Las señales de radio difundidas (broadcast) por una sola antena se propagan en todas las direcciones y, del mismo modo, una antena recibirá señales desde cualquier dirección. Esto hace que el radar se encuentre con el problema de saber dónde se ubica el blanco.
Los primeros sistemas solían utilizar antenas omnidireccionales, con antenas receptoras directivas apuntando en distintas direcciones. Por ejemplo, el primer sistema que se instaló (Chain Home) utilizaba dos antenas receptoras cuyas direcciones de observación formaban un ángulo recto, cada una asociada a una pantalla diferente. El mayor nivel de eco se obtenía cuando la dirección de observación de la antena y la línea radar-blanco formaban ángulo recto y, por el contrario, era mínimo cuando la antena apuntaba directamente hacia el objetivo. El operador podía determinar la dirección de un blanco rotando la antena de modo que una pantalla mostrase un máximo y otra un mínimo.
Una importante limitación de este tipo de solución era que el pulso se transmitía en todas las direcciones, de modo que la cantidad de energía en la dirección que se examinaba era solo una pequeña parte de la transmitida. Para que llegue una potencia razonable al blanco se requieren antenas direccionales.
Reflector parabólico
Los sistemas más modernos usan reflectores parabólicos dirigibles para estrechar el haz en el que se emite en broadcast el pulso. Generalmente el mismo reflector se utiliza también como receptor. En estos sistemas, a menudo se usan dos frecuencias radar en la misma antena para permitir control automático ("radar lock").
Guiaonda ranurada
La guía de onda ranurada se mueve mecánicamente para hacer el barrido y es adecuada para sistemas de búsqueda (no de seguimiento). Las guiaondas ranuradas son muy direccionales en el plano de la antena pero, al contrario que las parabólicas, no son capaces de distinguir en el plano vertical. Suelen usarse en detrimento de las parabólicas en cubiertas de barcos y exteriores de aeropuertos y puertos, por motivos de coste y resistencia al viento.
 Phased array: no es necesario movimiento físico para hacer el barrido
Phased array: no es necesario movimiento físico para hacer el barridoPhased arrays
Otro tipo de antenas que se suele usar para radares son los phased arrays. Un phased array consiste en una matriz (array) de elementos radiantes. La fase de la señal que alimenta cada uno de estos está controlada de tal manera que la radiación del conjunto sea muy directiva. Es decir, se juega con las fases de las señales para que se cancelen en las direcciones no deseadas y se interfieran constructivamente en las direcciones de interés.
El diagrama de radiación del array se obtiene como la interferencia de los campos radiados por cada una de las antenas. En recepción la señal recibida es una combinación lineal de las señales que capta cada antena. El diagrama de radiación total viene dado por el diagrama de radiación conjunto y el diagrama de radiación del elemento aislado.
En el diseño de arrays intervienen muchos parámetros : número de elementos, disposición física de los elementos, amplitud de la corriente de alimentación, fase relativa de la alimentción y tipo de antena elemental utilizada. Configurando estos parámetros se pueden mejorar las características de radiación del diagrama de radiación individual : mejorar la directividad, mejorar la relación de lóbulo principal a secundario, conformar el diagrama para cubrir la zona de interés y tener la posibilidad de controlar electrónicamente el apuntamiento del haz principal.
El uso de los phased arrays se remonta a la Segunda Guerra Mundial, pero las limitaciones de la electrónica hacían que fueran poco precisos. Su aplicación original era la defensa anti-misiles. En la actualidad son parte imprescindible del sistema AEGIS y el sistema balístico MIM-104 Patriot. Su uso se va extendiendo debido a la fiabilidad derivada del hecho de que no tienen partes móviles. Casi todos los radares militares modernos se basan en phased arrays, relegando los sistemas basados en antenas rotatorias a aplicaciones donde el costo es un factor determinante (tráfico aéreo, meteorología,...) Su uso está también extendido en aeronaves militares debido a su capacidad de seguir múltiples objetivos. El primer avión en usar uno fue el B-1B Lancer. El primer caza, el MiG-31 ruso. El sistema radar de dicho avión está considerado como el más potente de entre todos los cazas [1].
En radioastronomía también se emplean los phased arrays para, por medio de técnicas de apertura sintética, obtener haces de radiación muy estrechos. La apertura sintética se usa también en radares de aviones.
Clasificación de los sistemas de radar
Se puede hacer una clasificación general de los radares en función de una serie de aspectos básicos:
Según el número de antenas
-
- Monoestático: una sola antena transmite y recibe.
- Biestático: una antena transmite y otra recibe, en un mismo o diferentes emplazamientos.
- Multiestático: combina la información recibida por varias antenas.
Según el blanco
-
- Radar primario: funciona con independencia del blanco, dependiendo solamente de la RCS del mismo.
- Radar secundario: el radar interroga al blanco, que responde, normalmente con una serie de datos (altura del avión, etc). En el caso de vehículos militares, se incluye el identificador amigo-enemigo.
Según la forma de onda
-
- Radar de onda continua (CW): transmite ininterrumpidamente. El radar de la policía suele ser de onda continua y detecta velocidades gracias al efecto Doppler.
- Radar de onda continua con modulación (CW-FM, CW-PM): se le añade a la señal modulación de fase o frecuencia con objeto de determinar cuando se transmitió la señal correspondiente a un eco (permite estimar distancias).
- Radar de onda pulsada: es el funcionamiento habitual. Se transmite periódicamente un pulso, que puede estar modulado o no. Si aparecen ecos de pulsos anteriores al último transmitido, se interpretarán como pertenecientes a este último, de modo que aparecerán trazas de blancos inexistentes.
Según su finalidad
-
- Radar de seguimiento: es capaz de seguir el movimiento de un blanco. Por ejemplo el radar de guía de misiles.
- Radar de búsqueda: explora todo el espacio, o un sector de él, mostrando todos los blancos que aparecen. Existen radares con capacidad de funcionar en ambos modos.
Según su frecuencia de trabajo
Nombre de la banda Frecuencias Longitudes de onda Observaciones HF 3-30 MHz 10-100 m Radares de vigilancia costera, vigilancia OTH (over-the-horizon) P < 300 MHz 1 m+ 'P' de "previo", aplicado de forma retrospectiva a los sistemas radar primitivos VHF 50-330 MHz 0.9-6 m Vigilancia a distancias muy elevadas, penetración en el terreno UHF 300-1000 MHz 0.3-1 m Vigilancia a distancias muy elevadas (ej: detección de misiles), penetración en el terreno y a través de la vegetación L 1-2 GHz 15-30 cm Distancias elevadas, control de tráfico en ruta S 2-4 GHz 7.5-15 cm Vigilancia a distancias intermedias. Control de tráfico en terminales. Condiciones meteorológicas a largas distancias C 4-8 GHz 3.75-7.5 cm Seguimiento a distancias elevadas. Meteorología X 8-12 GHz 2.5-3.75 cm Guía de misiles, meteorología, cartografía de resolución media, radares de superficie aeroportuarios. Seguimiento a distancias cortas Ku 12-18 GHz 1.67-2.5 cm Cartografía de alta resolución. Altímetros para satélites K 18-27 GHz 1.11-1.67 cm Absorción del vapor de agua. Se usa para meteorología, para detectar nubes. También para control de velocidad de motoristas. Ka 27-40 GHz 0.75-1.11 cm Cartografía de muy alta resolución vigilancia de aeropuertos. Usado para accionar cámaras para fotografíar matrículas de coches infractores mm 40-300 GHz 7.5 mm - 1 mm Banda milimétrica, se subdivide como sigue. Nota: la denominación de las bandas no está unánimemente aceptada. Q 40-60 GHz 7.5 mm - 5 mm Comunicaciones militares V 50-75 GHz 6.0-4 mm Absorbido por la atmósfera E 60-90 GHz 6.0-3.33 mm W 75-110 GHz 2.7 - 4.0 mm Se usa como sensor para vehículos autónomos experimentales, meteorología de alta resolución y tratamiento de imágenes. Según su ámbito de aplicación
- Militar: radares de detección terrestre, radares de misiles autodirectivos, radares de artillería, radares de satélites para la observación de la Tierra.
- Aeronáutico : control del tráfico aéreo, guía de aproximación al aeropuerto, radares de navegación.
- Marítimo: radar de navegación, radar anti-colisión.
- Meteorológico: detección de precipitaciones (lluvia, nieve, granizo, etcétera).
- Circulación y seguridad en ruta: control de velocidad de automóviles, radares de asistencia de frenado de urgencia (ACC, Adaptive Cruise Control).
- Científico: en satélites para la observación de la Tierra, para ver el nivel de los océanos, encontrar restos arqueológicos, etc.
Otras tecnologías
- Radar tridimensional: es capaz de determinar la altura del blanco, además de su posición sobre el plano.
- Radar de imágenes laterales o radar de apertura sintética (SAR): permite la obtención de imágenes del terreno, similares a fotografías. Funcionan combinando mediante complicados algoritmos matemáticos diferentes series de observaciones de un radar con una antena pequeña, creando artificialmente la sensación de que se trata de una sola muestra hecha por una antena muy grande.
- Radares que operan utilizando la tecnología Ultra Wideband: pueden detectar un humano a través de paredes. Esto se hace posible gracias a que las características reflectivas de los humanos son generalmente mayores que las de los materiales utilizados en la construcción. Sin embargo, como los humanos reflejan mucho menos que el metal, estos sistemas requieren tecnología sofisticada para aislar a los objetivos humanos y luego construir una imagen detallada.
Véase también
Referencias
Bibliografía
- Principles of Modern Radar. J.L. Eaves, E.K. Reedy. Van Nostrand Reinhold, New York, 1987. (en inglés)
- Introduction to Radar Systems. M.I. Skolnik. McGraw–Hill (Second Edition), 1980. (en inglés)
- Radar Principles. N. Levanon. John Wiley and Sons. 1988. (en inglés)
- Introduction to Radar Analysis. B.R. Mahafza. CRC Press LLC 1998. (en inglés)
- Sistemas Radar (Temas I, II y III). Félix Pérez Martínez. 199?. Escuela Técnica Superior de Ingenieros de Telecomunicación. Universidad Politécnica de Madrid
- Antennas for radar and communications: a polarimetic approach. Harold Mott, John Wiley and Sons. 1992.
- Handbook of computer simulation in radio engineering, communicacions and radar. Sergey A. Leonov. Artecht House. 2001
- Radar Technology, Guy Kouemou (Ed.), InTech, 2010, ISBN 978-953-307-029-2, ([2]).
- Radar handbook, Merrill I. Skolnik,2nd ed, New York, McGraw-Hill, 1990
Enlaces externos
 Wikimedia Commons alberga contenido multimedia sobre RadarCommons.
Wikimedia Commons alberga contenido multimedia sobre RadarCommons.- Christian Huelsmeyer, the inventor - Radar World-
Categorías:- Aviónica
- Armamento
- Radares
- Tecnología
- Telecomunicaciones











Wikimedia foundation. 2010.