- Rotor rígido
-
Rotor rígido
El rotor rígido es un modelo que se utiliza para explicar el movimiento de los sistemas que rotan. Un rotor rígido es un objeto rígido tridimensional, por ejemplo un trompo o peonza. Para orientar dicho objeto en el espacio se necesitan tres ángulos (véase ángulos de Euler). Un caso especial de sólido rígido es el rotor lineal, ya que es un objeto bidimensional que solamente requiere dos ángulos para orientarlo. Las moléculas diatómicas son un ejemplo de rotor lineal, mientras que moléculas como el agua (rotor asimétrico), el amoniaco (rotor simétrico) o el metano (rotor esférico) son tridimensionales (véase espectroscopia rotacional).
Contenido
El rotor lineal
El modelo de rotor rígido lineal más simple consiste de dos masas situadas a una distancia fija de su centro de masas. La distancia entre las dos masas y el valor de las masas son las magnitudes características del modelo. Sin embargo, para muchas moleculas diatómicas este modelo es demasiado simple debido a que la distancia interatómica no se pueden considerar fija. En estos casos es necesario incluir correcciones al modelo de rotor rígido que incluyan las pequeñas variaciones de la distancia. Incluso en ese caso el modelo del rotor rígido es un punto de partida útil (modelo de orden cero).
El rotor rígido lineal mecanocuántico
El modelo de rotor rígido lineal se puede utilizar en mecánica cuántica para predecir la energía rotacional de una molécula diatómica. La energía rotacional depende del momento de inercia del sistema I. En el sistema de referencia del centro de masas, el momento de inercia es:

donde μ es la masa reducida de la molécula y R es la distancia entre los dos átomos.
De acuerdo con la mecánica cuántica, los niveles de energía se determinan resolviendo la ecuación de Schrödinger:

donde Y es la función de onda y
 es el operador asociado a la energía o Hamiltoniano. En el caso de un rotor rígido en un espacio libre de fuerzas, el operador energía corresponde con la energía cinética[1] del sistema:
es el operador asociado a la energía o Hamiltoniano. En el caso de un rotor rígido en un espacio libre de fuerzas, el operador energía corresponde con la energía cinética[1] del sistema:
donde
 es la constante de Planck divida por 2π y
es la constante de Planck divida por 2π y  es el Laplaciano. Debido a que el sistema tiene simetría esférica expresaremos el Laplaciano en función de las coordenadas esféricas:
es el Laplaciano. Debido a que el sistema tiene simetría esférica expresaremos el Laplaciano en función de las coordenadas esféricas:![\nabla^2 =\frac{1}{R^2} \left [ {\partial \over \partial R} R^2 {\partial \over \partial R} +
{1 \over \sin \theta} {\partial \over \partial \theta} \left ( \sin \theta {\partial \over \partial \theta} \right ) + {1 \over {\sin^2 \theta}} {\partial^2 \over \partial \varphi^2} \right]](/pictures/eswiki/50/2e51893fc5161e31e36e53034998addf.png)
Así, teniendo en cuenta que para el rotor rígido R es constante, la función de onda solamente depende de θ y
 y, por tanto, el operador energía cinética se expresa como:
y, por tanto, el operador energía cinética se expresa como:![\hat H =- \frac{\hbar^2}{2I} \left [ {1 \over \sin \theta} {\partial \over \partial \theta} \left ( \sin \theta {\partial \over \partial \theta} \right ) + {1 \over {\sin^2 \theta}} {\partial^2 \over \partial \varphi^2} \right]](/pictures/eswiki/98/be8462f5e7ae2ea6a44eb9712a08ee87.png)
Este operador aparece en la ecuación de Schrödinger para una partícula en un potencial de simetría esférica, como es el caso del átomo de hidrógeno después de separar la parte radial.

donde
 representa los armónicos esféricos. Nótese que como consecuencía la energía no depende de
representa los armónicos esféricos. Nótese que como consecuencía la energía no depende de  . La energía
. La energía
es
 veces degenerada debido a que las funciones con un
veces degenerada debido a que las funciones con un  fijo y distinto valor de
fijo y distinto valor de  tienen la misma energía.
tienen la misma energía.Definiendo la constante rotacional B como
 podemos reescribir la energía como
podemos reescribir la energía como
Habitualmente se expresa la constante rotacional, y por tanto la energía, en número de ondas:
donde c es la velocidad de la luz. Si se utiliza el Sistema Cegesimal de Unidades para h, c, e I, la constante rotacional
 se expresa en cm-1, unidad muy utilizada en las espectroscopias rotacional y vibracional. Teniendo en cuenta que la constante rotacional
se expresa en cm-1, unidad muy utilizada en las espectroscopias rotacional y vibracional. Teniendo en cuenta que la constante rotacional  depende de la distancia R, habitualmente se expresa ésta en téminos de la distancia de equilibrio Re (valor en el cual la interacción de los átomos en el rotor es mínima) y por tanto se expresa como
depende de la distancia R, habitualmente se expresa ésta en téminos de la distancia de equilibrio Re (valor en el cual la interacción de los átomos en el rotor es mínima) y por tanto se expresa como  .
.Un espectro rotacional típico consiste de una serie de picos que corresponden con transiciones entre niveles con diferentes valores del número cuántico de momento angular,
 . Así, los picos rotacionales aparecen a energías que corresponden con múltiplos enteros de
. Así, los picos rotacionales aparecen a energías que corresponden con múltiplos enteros de  .
.Rotor rígido con forma arbitraria
Un rotor rígido con forma arbitraria es un cuerpo rígido que puede rotar libremente respecto de su centro de masas en las tres direcciones del espacio R3 (considerando que éste está libre de campos). Así, la energía del sistema consiste sólo de la energía cinética rotacional (y, en su caso, de la energía traslacional del sistema que al ser constante en un espacio libre de campos puede ignorarse considerando el sistema de referencia fijo en el sólido rígido).
Un sólido rígido puede caracterizarse (parcialmente) por los tres autovalores del tensor de inercia que tienen valores reales nonegativos y se conocen con el nombre de momentos principales de inercia. En espectroscopia de microondas—la espectroscopia basada en transiciones rotacionales—usualmente se clasifican las moléculas (considerandolas como rotores rígidos) de acuerdo con los valores relativos de los momentos principales de inercia (Ia, Ib, Ic):
- rotores esféricos (Ia = Ib = Ic)
- rotores simétricos
- rotores simétricos achatados (Ia = Ib < Ic)
- rotores simétricos alargados (Ia < Ib = Ic)
- rotores asimétricos (Ia < Ib < Ic)
Coordenadas del rotor rígido
Diferentes ramas de la física y la ingeniería utilizan diferentes coordenadas para describir la cinemática de un rotor rígido. En física molecular los ángulos de Euler se usan casi exclusivamente. En las aplicaciones mecanocuánticas es ventajoso usar los ángulos de Euler con un convenio que es una extensión del convenio físico de las coordenadas esféricas polares.
El primer paso es considerar un sistema de referencia dextrógiro y ortonormal (un sistema de ejes ortonormal de 3 dimensiones) unido al rotor (sistema de referencia fijo en el cuerpo). Este sistema de referencia se puede fijar arbitrariamente al cuerpo, aunque normalmente se usan los ejes principales como sistema de referencia—los autovectores normalizados del tensor de inercia que, debido a que es simétrico, siempre se pueden elegir ortonormales. Cuando el rotor poseé un eje de simetría, éste suele coincidir con alguno de los ejes principales. Es conveniente elegir el eje z fijo al cuerpo como el eje de simetría de mayor orden.
Primero, se empieza alineando el sistema de referencia fijo en el cuerpo con un sistema de referencia fijo en el espacio (ejes de laboratorio), de tal manera que los ejes x, y, y z fijos en el cuerpo coinciden con los ejes X, Y, y Z fijos en el espacio. Segundo, se rotan el cuerpo y su sistema de referencia respecto del eje z un ángulo positivo
 (siguiendo la regla de rotación de la mano derecha), que mueve el eje y a un eje y'. Tercero, se rota el cuerpo y su sistema de referencia un ángulo positivo
(siguiendo la regla de rotación de la mano derecha), que mueve el eje y a un eje y'. Tercero, se rota el cuerpo y su sistema de referencia un ángulo positivo  respecto del eje y'. El eje z del sistema de referencia fijo en el cuerpo tiene, después de las dos rotaciones, un ángulo longitudinal (habitualmende denominado
respecto del eje y'. El eje z del sistema de referencia fijo en el cuerpo tiene, después de las dos rotaciones, un ángulo longitudinal (habitualmende denominado  ) y un ángulo polar o colatitud (habitualmente denominado
) y un ángulo polar o colatitud (habitualmente denominado  ), ambos con respecto al sistema de referencia fijo en el espacio. Si el rotor fuese de simetría cilíndrica respecto del eje z, como el rotor rígido lineal, su orientación en el espacio estaría especificada sin ambigüedad en este punto.
), ambos con respecto al sistema de referencia fijo en el espacio. Si el rotor fuese de simetría cilíndrica respecto del eje z, como el rotor rígido lineal, su orientación en el espacio estaría especificada sin ambigüedad en este punto.Si el sistema no tiene simetría cilíndrica (axial), es necesario especificar una última rotación respecto de su eje z (con coordenadas polares
y ) con el fin de especificar completamente su orientación. Tradicionalmente el ángulo asociado a esta última rotación se denomina  .
.La matriz que representa las tres rotaciones consecutivas se obtiene como el producto:

Sea
 el vector de posición de un punto arbitrario
el vector de posición de un punto arbitrario  del rotor respecto del sistema de referencia fijo en el cuerpo. Los elementos de son las coordenadas de respecto del cuerpo. Inicialmente es también el vector de coordenadas de respecto del sistema fijo en el espacio. Después de que el cuerpo rota, las coordenadas de fijas en el cuerpo no cambian, mientras que las coordenadas de respecto del espacio cambian a:
del rotor respecto del sistema de referencia fijo en el cuerpo. Los elementos de son las coordenadas de respecto del cuerpo. Inicialmente es también el vector de coordenadas de respecto del sistema fijo en el espacio. Después de que el cuerpo rota, las coordenadas de fijas en el cuerpo no cambian, mientras que las coordenadas de respecto del espacio cambian a:
En particular, si
se encuentra inicialmente en el eje Z fijo en el espacio, entonces sus coordenadas fijas en el espacio son: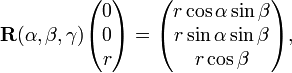
que muestra la correspondencia con las coordenadas esféricas polares (en la convención física).
Conocer la variación con el tiempo de los ángulos de Euler junto con las coordenadas iniciales
determina la cinemática del rotor rígido.Energía cinética clasica
Las siguientes expresiones son una generalización de la expresión de la energía rotacional para el caso más simple, él de un objeto que rota alrededor de un eje.
Supondremos que el sistema de referencia fijo en el cuerpo es un sistema de referencia de ejes principales; este sistema de referencia diagonaliza el tensor de inercia instantáneo
 (expresado respecto del sistema de referencia fijo en el espacio), i.e.,
(expresado respecto del sistema de referencia fijo en el espacio), i.e.,
donde los ángulos de Euler dependen del tiempo y, por tanto, determinan la dependencia con el tiempo de
simplemente tomando la inversa de esta ecuación. Esta notación implica que a t = 0 los ángulos de Euler son cero, de tal manera que a t = 0 el sistema de referencia fijo en el cuerpo coincide con el sistema de referencia fijo en el espacio.La energía cinética clásica T del rotor rígido se puede expresar de diferentes formas:
- en función de la velocidad angular,
- en forma Lagrangiana,
- en función del momento angular, y
- en forma Hamiltoniana.
Como cada una de estas formas tiene su utilidad y se puede encontrar en los libros de texto, las presentaremos todas ellas aquí.
Expresión en función de la velocidad angular
La expresión de T en función de la velocidad angular es,
![T = \frac{1}{2} \left[ I_1 \omega_x^2 + I_2 \omega_y^2+ I_3 \omega_z^2 \right]](/pictures/eswiki/49/1567e4fb259766941584a80d25480f84.png)
con
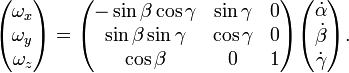
El vector
 contiene las componentes de la velocidad angular del rotor expresada respecto del sistema de referencia fijo en el cuerpo. Se puede demostrar que
contiene las componentes de la velocidad angular del rotor expresada respecto del sistema de referencia fijo en el cuerpo. Se puede demostrar que  no es la derivada respecto del tiempo de ningún vector, en contraste con la definición de velocidad habitual. Los puntos sobre los ángulos de Euler dependientes del tiempo indican la derivada respecto del tiempo. La velocidad angular satisface las ecuaciones de movimiento denominadas ecuaciones de Euler (sólidos) (sin torque, ya que se ha supuesto un rotor en un espacio libre de campos).
no es la derivada respecto del tiempo de ningún vector, en contraste con la definición de velocidad habitual. Los puntos sobre los ángulos de Euler dependientes del tiempo indican la derivada respecto del tiempo. La velocidad angular satisface las ecuaciones de movimiento denominadas ecuaciones de Euler (sólidos) (sin torque, ya que se ha supuesto un rotor en un espacio libre de campos).Forma lagrangiana
Sustituyendo la expresión de
en T permite obtener la energía cinética en la forma lagrangiana (en función de las derivadas respecto del tiempo de los ángulos de Euler). En notación matricial se expresa como: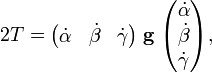
donde
 es el tensor de la métrica expresado en los ángulos de Euler angles—un sistema de coordenadas curvilíneas no-ortogonal—
es el tensor de la métrica expresado en los ángulos de Euler angles—un sistema de coordenadas curvilíneas no-ortogonal—
Expresión en función del momento angular
Amenudo la energía cinética se escribe en función del momento angular
 del rotor rígido. Este vector es una magnitud que se conserva (independiente del tiempo). Sus componentes,
del rotor rígido. Este vector es una magnitud que se conserva (independiente del tiempo). Sus componentes,  , respecto del sistema de referencia fijo en el cuerpo se relacionan con la velocidad angular mediante
, respecto del sistema de referencia fijo en el cuerpo se relacionan con la velocidad angular mediante
Debido a que el sistema de referencia fijo en el cuerpo se mueve (depende del tiempo), estas componentes no son independientes del tiempo. Si quisiesemos representar
respecto del sistema de referencia fijo en el espacio (y, por tanto, estacionario) deberiamos obtener expresiones independientes del tiempo para sus componentes. La energía cinética toma la forma![T = \frac{1}{2} \left[ \frac{L_x^2}{I_1} + \frac{L_y^2}{I_2}+ \frac{L_z^2}{I_3}\right].](/pictures/eswiki/52/4ac24bebd7c5e648a6763fb6c2d6f6e5.png)
Forma hamiltoniana
La forma hamiltoniana de la energía cinética se escribe en función de los momentos generalizados
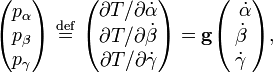
donde se ha utilizado que
es simétrico. En la forma hamiltoniana la energía cinética es:
siendo la inversa del tensor de la métrica


Esta inversa del tensor de la métrica se necesita para obtenere el operador de Laplace-Beltrami, que (multiplicado por
 ) permite obtener el operador mecano cuántico de energía para el rotor rígido.
) permite obtener el operador mecano cuántico de energía para el rotor rígido.El Hamiltoniano clásico anterior se puede reescribir de la siguiente forma, necesaria en la integral de fase que aparece en la mecánica estadística clásica del rotor rígido,

Referencias
Artículos
- ↑ B. Podolsky, Phys. Rev., vol. 32, p. 812 (1928)
Libros
- I.N. Levine.; (traducción, Alberto Requena Rodríguez y Antonio Fuster Ortigosa) (1980). Espectroscopía Molecular. Madrid: AC, D.L.. ISBN 84-7288-038-9.
Categorías: Mecánica cuántica | Espectroscopia
Wikimedia foundation. 2010.