- Locomotora eléctrica
-
 Una DBAG Clase 152 del Deutsche Bahn arrastrando un tren de carga.
Una DBAG Clase 152 del Deutsche Bahn arrastrando un tren de carga.
 Una locomotora ALP-46 AC del New Jersey Transit basada en la DBAG Clase 101.
Una locomotora ALP-46 AC del New Jersey Transit basada en la DBAG Clase 101.Una locomotora eléctrica es una locomotora alimentada por una fuente externa de energía eléctrica. La fuente externa puede ser catenaria, tercer riel, o por medio de un dispositivo de almacenamiento a bordo, como baterías, baterías inerciales o pilas de combustible.
Locomotoras impulsadas por motores eléctricos con motores primarios a bordo de combustible líquido, como los motores diésel o turbinas de gas, son clasificadas como locomotoras Diésel-Eléctricas o locomotoras turbina de gas-eléctricas, debido a que la combinación de motor/generador sólo sirve como un sistema de transmisión de energía.
Contenido
Características
Una ventaja de la electrificación es la ausencia de polución por parte de la locomotora en sí misma. Otras ventajas son mejores prestaciones, menores costos de mantenimiento, y menor costo de la energía eléctrica para las locomotoras.
La centrales eléctricas, incluso cuando queman combustibles fósiles, son por mucho más limpias que los motores móviles como los motores primarios de las locomotoras. Además, la energía de las locomotoras eléctricas puede venir de fuentes limpias o renovables, incluyendo energía geotérmica, hidráulica, nuclear, solar, y eólica. Las locomotoras eléctricas también ganan al compararlas con las locomotoras diésel debido a que no tiene motor ni ruido de escape, y menor ruido de transmisión mecánica. La falta de componentes con movimiento alternativo hace que las locomotoras sean más "amigables" con la vía, lo que reduce su mantenimiento.
La capacidad de las centrales eléctricas es por lejos mayor que la que usa una locomotora en forma individual, por lo que pueden tener una potencia de salida mayor que las locomotoras diésel y pueden producir gran potencia por corto tiempo para acelerar. Las locomotoras eléctricas son ideales para servicios de trenes suburbanos con paradas frecuentes. Son usadas en todas las líneas de alta velocidad, como el ICE en Alemania, Acela en USA, Shinkansen en Japón y el TGV en Francia. Las locomotoras eléctricas también son usadas en rutas de carga que tienen un tráfico de gran volumen, o en áreas con una red ferroviaria avanzada.
La locomotoras eléctricas se benefician de la alta eficiencia de los motores eléctricos, cercana al 90%. Puede obtenerse una eficiencia adicional con los frenos regenerativos, el cual permite convertir la energía cinética en electricidad durante el frenado, y enviar electricidad a la línea. Las locomotoras más nuevas usan sistemas inversores de control de los motores CA que proveen frenado re-generativo.
La principal desventaja de la electrificación es el costo de la infraestructura (tendido de la catenaria o del tercer riel, subestaciones, sistemas de control). En Europa y en otros lugares, la red ferroviaria es considerada parte de la infraestructura nacional de transporte, al igual que las carreteras, autopistas y vías fluviales, y por lo tanto financiada por el estado. Los operadores del material rodante pagan una tasa acorde al uso de la red ferroviaria. Esto hace posible las grandes inversiones requeridas en tecnología, y a largo plazo, hace ventajosa la electrificación.
Historia
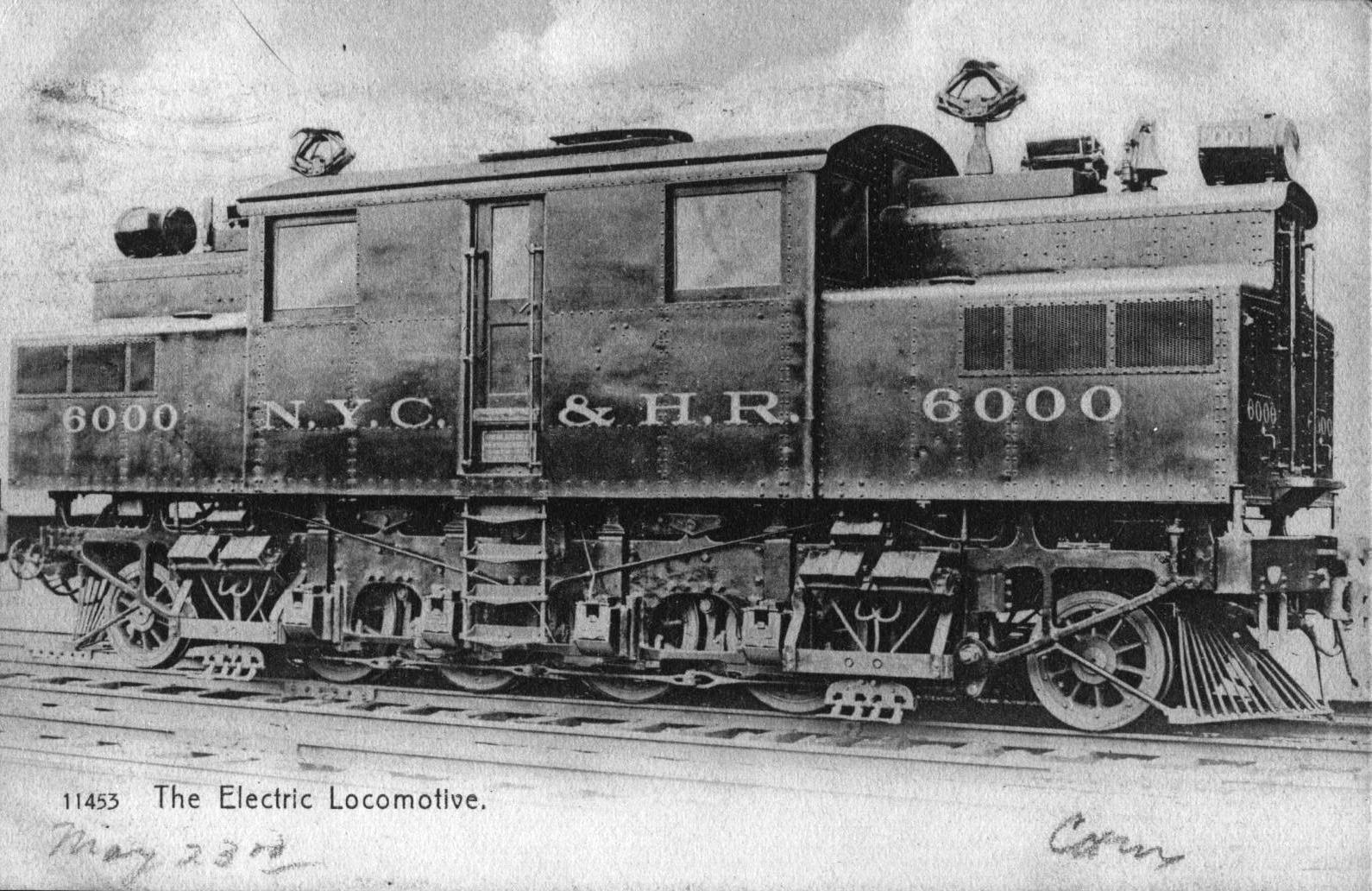
 Prototipo de la Clase S-1 de Alco-GE, NYC & HR Nº 6000 (CC)
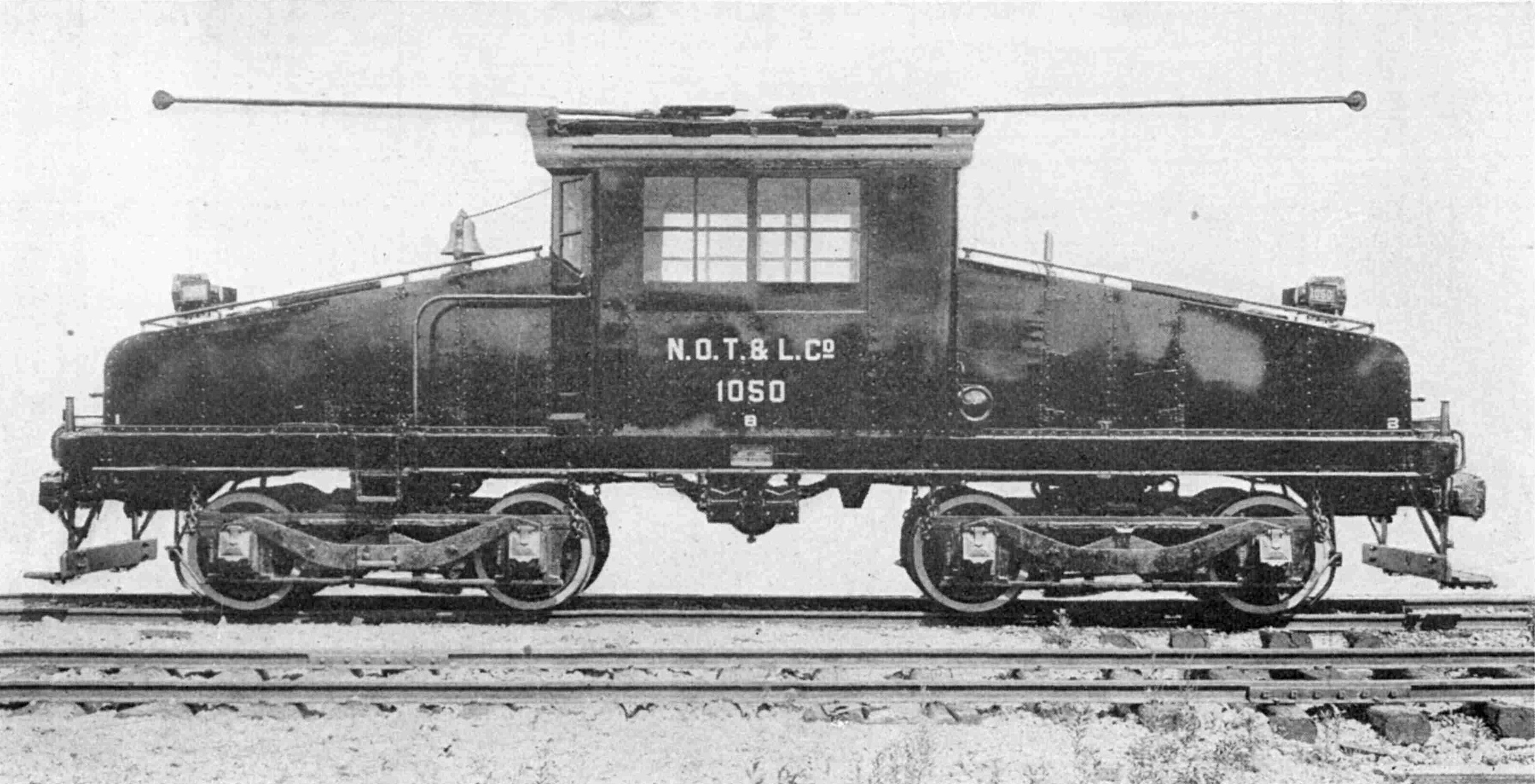
Prototipo de la Clase S-1 de Alco-GE, NYC & HR Nº 6000 (CC) Una locomotora eléctrica tipo "camello" de GE. Este ejemplar está equipado con troleys para trabajar en ferrocarriles interurbanos.
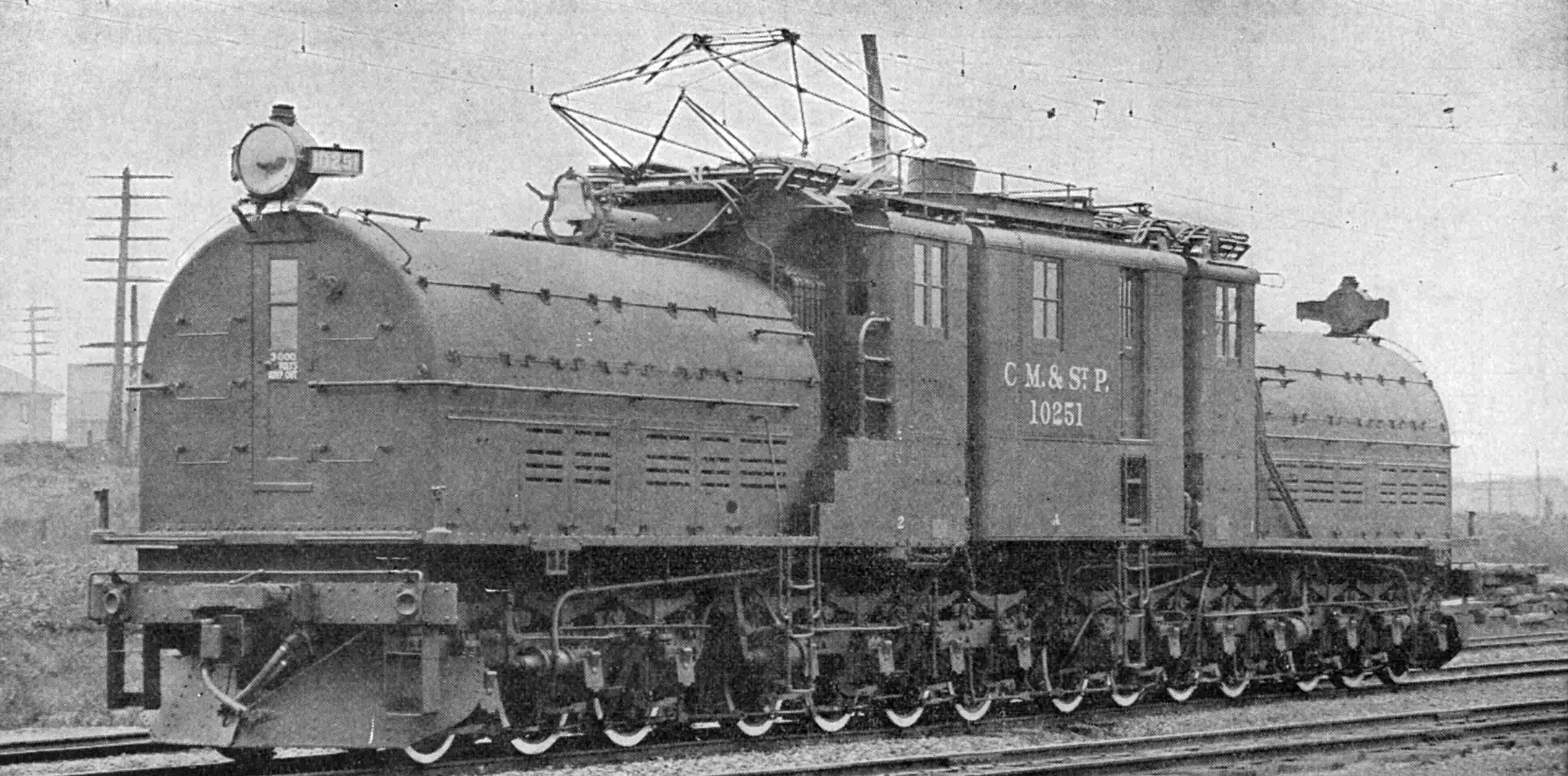
Una locomotora eléctrica tipo "camello" de GE. Este ejemplar está equipado con troleys para trabajar en ferrocarriles interurbanos. Una Milwaukee Road clase ES-2, una locomotora de maniobras con una gran cabina tipo camello para servicios en un ferrocarril eléctrico de gran tráfico.
Una Milwaukee Road clase ES-2, una locomotora de maniobras con una gran cabina tipo camello para servicios en un ferrocarril eléctrico de gran tráfico.El primer ferrocarril eléctrico conocido fue construido por un escocés, Robert Davidson de Aberdeen, en 1837 y era impulsado por celdas galvánicas ('baterías'). Davidson construyó, más tarde, una gran locomotora llamada Galvani la cual fue exhibida en la Exhibición de la Royal Scottish Society of Arts de 1841. Fue probada en el Edinburgh and Glasgow Railway en septiembre del siguiente año, pero la limitada corriente eléctrica suministrada por las baterías impedían su uso general.[1] [2] El primer tren eléctrico fue presentado por Werner von Siemens en Berlín en 1879. La locomotora era impulsada por un motor de 2,2 kW y el tren consistía de la locomotora y tres coches, con una velocidad máxima de 13 km/h. Durante cuatro meses el tren transportó 90.000 pasajeros en una vía circular de 300 m de largo. La electricidad era suministrada por un tercer riel aislado situado en el medio de la vía. Un dínamo estacionario cercano proveía la electricidad. La primera línea de tranvía eléctrico fue abierta en Lichterfelde, cerca de Berlín, Alemania, en 1881. Fue construida por Werner von Siemens (ver Berlin Straßenbahn). En Gran Bretaña, el ferrocarril eléctrico de Volk fue abierto en 1883 en Brighton (ver Ferrocarril Eléctrico de Volk). En USA, los primeros tranvías eléctricos fueron los del Richmond Union Passenger Railway en 1888, usando equipamiento diseñado por Frank J. Sprague.[3]
Buena parte de los primeros desarrollos de las locomotoras eléctricas fue motivado por el incremento de túneles, particularmente en las áreas urbanas. El humo de las locomotoras de vapor era nocivo, y las municipalidades aumentaron su inclinación a prohibir su uso dentro de sus límites. De esta forma, el primer trabajo exitoso fue en el ferrocarril subterráneo City and South London Railway en el Reino Unido, fue motivado una cláusula de su acta de habilitación que prohibía la utilización de la energía de vapor.[4] Esta línea fue abierta en 1890, usando locomotoras eléctricas construidas por Mather and Platt. La electricidad se volvió rápidamente la opción elegida para los subterráneos, apoyada por la invención de Sprague del control de tren de unidades múltiples en 1897. Los trenes subterráneos y elevados generalmente usaban vapor hasta que fueron obligados a convertirse.
En 1894, el ingeniero húngaro Kálmán Kandó desarrolló motores de corriente alterna trifásico de alto voltaje y generadores para locomotoras eléctricas; es conocido como "el padre del tren eléctrico".[cita requerida] Su trabajo para electrificar los ferrocarriles fue hecho en los talleres eléctricos Ganz en Budapest. En 1915, formuló el principio de que las líneas ferroviarias principales sólo podían ser exitosas si podían usar, por medio de simples subestaciones transformadoras, directamente la frecuencia estándar de la red pública.[5] Después de realizar eso, también creó los principios para construir una red ferroviaria al inventar un convertidor de fase rotatorio aplicable en locomotoras.
La primera electrificación de una línea principal fue en un trecho de 6,4 km del Baltimore Belt Line del Baltimore and Ohio Railroad (B&O) en 1895. Esta vía conectaba la parte principal del B&O a la línea de recientemente construida a New York, y requería una serie de túneles alrededor de la ciudad de Baltimore. Vías paralelas en el Pennsylvania Railroad mostraron que el humo del carbón de las locomotoras a vapor podían ser la mayor cuestión operativa, así como también una molestia pública. Inicialmente se usaron tres unidades Bo+Bo en el extremo sur de la sección electrificada; eran acopladas al tren entero, incluidas las locomotoras, y lo arrastraba a través de los túneles.[6]
En Europa, los proyectos de electrificación inicialmente se enfocaron en la regiones montañosas por varias razones: los suministros de carbón eran difíciles, la energía hidroeléctrica estaba fácilmente disponible, y las locomotoras eléctricas daban más tracción en las líneas empinadas. Hoy el 100% de las líneas suizas está electrificada.
Las entradas del ferrocarril a la Ciudad de Nueva York requerían túneles similares, y aquí los problemas del humo eran más graves. Una colisión en el túnel de Park Avenue en 1902 hizo que la legislatura del Estado de Nueva York prohibiera el uso de locomotoras generadoras de humo al sur del río Harlem después del 1 de julio de 1908. En respuesta, las locomotoras eléctricas comenzaron a operar en 1904 en el New York Central Railroad. En la década de 1930 el Pennsylvania Railroad, el cual también había introducido las locomotoras eléctricas debido a las regulaciones de la Ciudad de Nueva York, electrificó toda su red al este de Harrisburg, Pennsylvania.
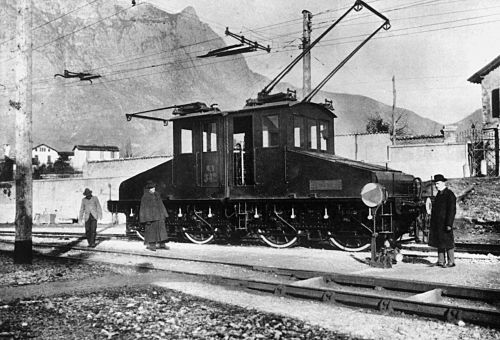
Los ferrocarriles italianos fueron los primeros en el mundo en utilizar tracción eléctrica (diseñada por Kálmán Kandó en los talleres eléctricos Ganz, Budapest[7] ) para una línea principal completa en lugar de sólo un tramo. Los 106 km de la línea Valtellina fueron abiertos el 4 de septiembre de 1902. El sistema eléctrico era trifásico de 3 kV y 15 Hz. El voltaje era bastante más alto que el usado anteriormente y requería nuevos diseños para los motores eléctricos y los dispositivos de los cambios.[5] [8] Durante el periodo de electrificación de los ferrocarriles italianos, se realizaron varias pruebas para determinar el tipo de alimentación a usar: en algunas secciones era trifásica de 3,6 kV y 16,6 Hz, en otras había 1500 V CC, 3 kV CC y 10 kV CA a 50Hz. Durante los años de la década de 1930, se eligió la electricidad de 3kV CC para todo el sistema ferroviario italiano (hoy en día, 1500 V CC se mantiene en uso en algunas líneas cerca de Francia y en los trenes de alta velocidad se utiliza 25 kV a 50Hz).[2]
En Estados Unidos, el Chicago, Milwaukee, St. Paul and Pacific Railroad (el Milwaukee Road), la última línea transcontinental en ser construida, electrificó su línea a través de las Montañas Rocallosas y al Océano Pacífica, comenzando en 1915. Unas pocas líneas de la Costa Este, notablemente el Virginian Railway y el Norfolk and Western Railway, consideraron conveniente electrificar tramos cortos de sus cruces de montaña. Sin embargo, para ese entonces, la electrificación en Estados Unidos eestaba más asociada con tráfico urbano denso, y el centro de desarrollo paso a Europa, donde la electrificación estaba generalizada.
 Una Re 420 suiza arrastra un tren de carga cuesta abajo en el lado sur de la línea Gotthard, la que fue electrificada en 1922. Son visibles los postes y los cables de la catenaria.
Una Re 420 suiza arrastra un tren de carga cuesta abajo en el lado sur de la línea Gotthard, la que fue electrificada en 1922. Son visibles los postes y los cables de la catenaria.En 1923, la primera locomotora eléctrica con un convertidor de fase fue construida en base a los diseños de Kandó en Hungría, y la producción comenzó poco después. El convertidor transformaba la electricidad monofásica en corriente alterna trifásica dentro de la locomotora. La sección Budapest - Hegyeshalom - Viena (1929) del Ferrocarril Estatal Húngaro fue construida en base a este invento.
Los años de la década de 1960 vieron la electrificación de muchas líneas principales europeas (Europa del Este incluida). La tecnología europea de las locomotoras eléctricas estaba en constante evolución desde la década de 1920. Para comparación, la Milwaukee Road clase EP-2 de 1918, pesaba 240 Tm, con una potencia de 3.330 kW y una velocidad máxima de 112 km/h; en 1935, la alemana E 18 tenía una potencia de 2.800 kW, pero pesaba sólo 108 Tm y tenía una velocidad máxima de 150 km/h. El 29 de marzo de 1955, la locomotora francesa CC 7107 alcanzó los 331 km/h. En 1960 las locomotoras SJ Clase Dm 3 introducidas en los Ferrocarriles Suecos lograron la marca de 7.200 kW. En la misma época aparecieron en Alemania y Francia locomotoras capaces de alcanzar 200 km/h en los servicios comerciales de pasajeros. Posteriores avances se lograron gracias a la introducción de los sistemas de control electrónicos, los cuales permiten usar motores cada vez más pequeños y potentes que pueden caber enteramente en los bojes (normalizados a partir de la década de 1990 en motores asincrónicos trifásicos, alimentados a través de inversores GTO).
En los Estados Unidos, el uso de locomotoras eléctricas declinó el favor de la dieselización. Las diésel compartían algunas de las ventajas de las locomotoras eléctricas sobre el vapor, y el costo de construir y mantener la infraestructura de la red eléctrica, que siempre había desalentado las nuevas instalaciones, provocó la eliminación de la electrificación de la mayoría de las líneas principales fuera del noreste. Excepto para algunos sistemas cautivos (p.e. el Black Mesa and Lake Powell), para el año 2000 la electrificación fue confinada al Corredor del noreste y algunas líneas urbanas; incluso allí, el servicio de transporte de mercancías fue manejado por las diésel.
En la década de 1980, el desarrollo de servicios de muy alta velocidad revivió la electrificación. El Shinkansen japonés y el TGV francés fueron los primeros sistemas a los que se les dedicó líneas de alta velocidad construidas desde cero. Programas similares fueron realizados en Italia, Alemania y España; en Estados Unidos la única línea principal nueva fue una extensión de la electrificación del Corredor del noreste desde New Haven, Connecticut a Boston, Massachusetts, aunque sistemas de riel liviano, usando coches automotores eléctricos, se siguen construyendo.
El 2 de septiembre de 2006 una locomotora de producción estándar Siemens del Eurosprinter tipo ES64-U4 (ÖBB Clase 1216) alcanzó la velocidad de 357 km/h, estableciendo una marca para un tren arrastrado por una locomotora, en la nueva línea entre Ingolstadt y Nuremberg.[9]
Tipos de locomotoras eléctricas
 Controles de la locomotora eléctrica BDeh 4/4 de 1.000 mm de trocha (vista), operando en la línea Luzern-Engelberg. El volante controla la potencia de los motors, no la dirección.Archivo:DC Electric Locomotive.jpgLocomotora eléctrica usada en operaciones mineras en Flin Flon, Manitoba. Esta locomotora actualmente no está en servicio y se encuentra en exhibición.
Controles de la locomotora eléctrica BDeh 4/4 de 1.000 mm de trocha (vista), operando en la línea Luzern-Engelberg. El volante controla la potencia de los motors, no la dirección.Archivo:DC Electric Locomotive.jpgLocomotora eléctrica usada en operaciones mineras en Flin Flon, Manitoba. Esta locomotora actualmente no está en servicio y se encuentra en exhibición.Una locomotora eléctrica puede ser alimentada desde un
- Sistema de almacenamiento de energía recargable, como las locomotoras de minas alimentadas por baterías o condensadores de alta capacidad.
- Suministro fijo, como el tercer riel o una línea aérea.
Esto es un marcado contraste con una locomotora diésel-eléctrica, la cual combina un motor principal con un sistema de transmisión eléctrica o de almacenamiento (baterías, ultracondensadores).
Las características principales del diseño de las locomotoras eléctricas son:
- El tipo de corriente eléctrica usada, que puede ser corriente alterna o corriente continua.
- El método para almacenar (baterías, ultracondensadores) o recolectar (transmisión) energía eléctrica.
- El método utilizado para para conectar mecánicamente los motores de tracción con las ruedas motrices.
Corriente alterna o continua
La diferencia fundamental se encuentra en la elección de corriente continua (CC) o alterna (CA). Los primeros sistemas usaban corriente continua debido a que, inicialmente, la corriente alterna no era bien comprendida y no estaban disponibles materiales aislantes para las líneas de alto voltaje. Las locomotoras de corriente continua utilizan normalmente bajos voltajes (600 a 3.000 volts); el equipamiento es relativamente grande ya que la corriente manejada es alta para poder transmitir suficiente energía. La electricidad debe suministrarse a intervalos regulares debido a las pérdidas en los sistemas de transmisión grandes.
Cuando se desarrollaron los motores de corriente alterna, se volvieron el tipo predominante, particularmente en las rutas más largas. Se utiliza alto voltaje (decenas de miles de voltios) debido a que permite el uso de bajas corrientes; la pérdida de electricidad es proporcional al cuadrado de la corriente (p.e. el doble de corriente implica una pérdida cuatro veces superior). De esta manera, una gran cantidad de energía puede transmitirse a grandes distancias usando cables más livianos y baratos. Transformadores en le locomotora convierten esta energía en corriente de bajo voltaje para los motores.[10] Un sistema similar de alto voltaje/baja corriente no puede usarse en locomotoras de corriente continua debido a que no hay una forma eficiente de rectificar la corriente alterna.
 Locomotora de carga italiana E554 trabajando con corriente trifásica. Nótese los colectores separados, uno para cada fase. Fotografía tomada en Liguria en 1974.
Locomotora de carga italiana E554 trabajando con corriente trifásica. Nótese los colectores separados, uno para cada fase. Fotografía tomada en Liguria en 1974.La tracción CA rara vez usa línea de dos fases en lugar de la monofásica. La transmisión trifásica de los actuales motores de inducción, no tienen conmutadores sensitivos y permiten realizar más fácilmente el frenado regenerativo. La velocidad es controlada cambiando el número de pares de polos en el circuito estator y conmutando con resistencias adicionales en el circuito del rotor. Las líneas de dos fases son pesadas y complicadas cercas de los cambios de vía, donde una fase debe cruzarse con otra. El sistema se utilizó en la parte norte de Italia hasta 1976 y aún se utiliza en algunos ferrocarriles de cremallera en Suiza. Una ventaja es que la línea de dos fases hace viable un simple sistema de freno de seguridad, mientras que el control de velocidad y la línea de dos fases son problemáticas.
 La locomotora sueca Rc fue la primera en usar tiristores con motores CC.
La locomotora sueca Rc fue la primera en usar tiristores con motores CC.Los conmutadores usados anteriormente tenían problemas en el arranca y a bajas velocidades. Locomotoras rectificadoras, las cuales usan transmisión de CA y motores de CC, son comunes. Las avanzadas locomotoras eléctricas de hoy tienen invariablemente motores de CA de inducción trifásicos sin escobillas. Estás máquinas poli-fásicas están alimentadas con inversores basados en GTO, IGCT o IGBT. El costo de los dispositivos electrónicos en una moderna locomotora puede ser de hasta el 50% del costo total del vehículo.
La tracción eléctrica permite usar frenos regenerativos, en el cual los motores son usados como frenos y se convierten en generadores que transforman el movimiento del tren en energía eléctrica que es inyectada a la línea eléctrica. Este sistema es particularmente ventajoso en zonas de montaña, donde las locomotoras que descienden pueden producir una buena parte de la energía que requieren los trenes que ascienden.
Muchos sistemas tienen voltajes característicos, y en el caso de la corriente CA, una frecuencia del sistema. A lo largo de los años, muchas locomotoras fueron equipadas para poder manejar múltiples voltajes y frecuencias, y los sistemas se han ido actualizando o superponiendo. La locomotora estadounidense FL9 está equipada para manejar dos sistemas eléctricos diferentes y puede operar como una locomotora diésel-eléctrica convencional.
Mientras que los sistemas diseñados recientemente operan invariablemente con corriente alterna, muchos sistemas de corriente continua aún están en uso; p.e., en Sudáfrica y el Reino Unido (750 V y 1.500 V); Países Bajos, Japón, Bombay, Irlanda (1.500 V); Eslovenia, Bélgica, Italia, Polonia, Rusia, España (3.000 V), y la ciudad de Washington DC (750 V).
Transmisión de energía
 Un moderno pantógrafo. El dispositivo mostrado es, técnicamente, un medio-pantógrafo.
Un moderno pantógrafo. El dispositivo mostrado es, técnicamente, un medio-pantógrafo.Los circuitos eléctricos requieren dos conexiones (o tres para los sistenas trifásicos). Desde los tempranos inicios, la misma vía era usada para un polo del circuito, y al contrario de los modelos ferroviarios, el otro polo es suministrado en forma separada.
La electrificación original del Baltimore and Ohio Railroad usaba una zapata deslizante en un canal superior, un sistema que pronto se consideró no ser satisfactorio. Fue reemplazado por el sistema del tercer riel, en el cual una captador (la "zapata" o "patín") se traslada por arriba o por abajo de un pequeño riel paralelo a la vía principal, algo por encima del nivel del suelo. Hay múltiples captadores a ambos lados de la locomotora a fin de poder salvar las interrupciones del tercer riel, requeridas por el tendido ferroviario. El sistema es el preferido en los subterráneos debido a que permite poca holgura.
Sin embargo, los ferrocarriles prefieren líneas superiores, a veces llamada catenaria debido al sistema usado para mantener el cable paralelo al suelo. Tres métodos de recolección son posibles:
- Trole: una pértiga larga y flexible, la cual engancha la línea mediante una polea o una zapata.
- Colector de arco: un marco que sostiene una larga varilla contra el cable.
- Pantógrafo: un marco abisagrado que sostiene las zapatas colectoras contra el cable en una geometría fija.
De los tres, el pantógrafo es el método que mejor se adapta para las operaciones de alta velocidad. Algunas locomotoras están equipadas para usar tanto la catenaria como el tercer riel (p.e., la British Rail Clase 92).
Moviendo las ruedas
 Una de las Milwaukee Road EP-2 eléctricas "bi-polares".
Una de las Milwaukee Road EP-2 eléctricas "bi-polares".Durante el desarrollo de la propulsión ferroviaria eléctrica, se idearon varios sistemas para acoplar los motores de tracción con las ruedas. Las primeras locomotoras usaban un eje intermedio. En esta disposición, el motor de tracción está montado en el cuerpo de la locomotora, y mueve el eje intermedio a través de un juego de engranajes. Este sistema era usado porque lo primeros motores de tracción eran muy grandes y pesados para montarlo directamente en los ejes. Debido a la cantidad de componentes mecánicos, era necesario un frecuente mantenimiento. El eje intermedio fue abandonado, excepto en las máquinas más pequeñas, cuando se desarrollaron motores más pequeños y livianos.
Otros sistemas fueron creados a medida que la locomotora eléctrica maduraba. La transmisión Buchli fue un sistema de carga de resortes, en el cual el peso de los motores estaba completamente desconectado de las ruedas motrices. Usado por primera vez en locomotoras eléctricas a partir de la década de 1920, la transmisión Buchli fue usada principalmente en la SNCF francesa y en los Ferrocarriles Federales Suizos. El eje hueco fue también desarrollado en esta época, y montaba los motores de tracción encima o a un costado del eje motriz, y se acoplaba al eje mediante un conjunto de engranajes y un eje hueco semiflexible. La locomotora Pennsylvania Railroad GG1 usaba el eje hueco. Nuevamente, el eje hueco fue abandonado a medida que los motores disminuían su peso y tamaño.
Otro ejemplo de transmisión fue el sistema "bi-polar", en el cual el inducido del motor era el eje en sí mismo, mientras que la carcasa y los campos del motor estaban montados en el boje en una posición fija. El motor tiene campos de dos polos, lo cual permite un limitado movimiento vertical al inducido. Este sistema tenía un valor restringido debido a que la potencia de cada motor era limitada. Le EP-2 bi-polar usada por el Milwaukee Road compensaba este problema usando una gran cantidad de ejes motrices.
Las modernas locomotoras eléctricas, al igual que las diésel-eléctricas, usan motores casi universales montados en los ejes, con un motor por cada eje motriz. En esta disposición, un lado de la carcasa del motor está soportado por rodamientos planos que se desplazan sobre un muñón pulido, integrado al eje. El otro extremo de la carcasa del motor tiene un saliente en forma plana que se inserta en un zócalo en el boje, siendo su función la de soportar el torque, además de apoyo del motor. La potencia del motor al eje se efectúa por medio de engranajes rectos, que constan de un piñón en el eje del motor y una corona en el eje motriz. Ambos engranajes están cubiertos por un gabinete que contiene aceite lubricante. El tipo de servicio al cual se destina la locomotora determina la relación de los engranajes. Relaciones altas se usan en unidades de carga, mientras que las relaciones bajas son típicas para las locomotoras destinadas a trenes de pasajeros.
Disposición de las ruedas
 Una locomotora eléctrica GG1.
Una locomotora eléctrica GG1.La notación Whyte utilizada para clasificar las locomotoras de vapor no es adecuado para describir la variedad de disposiciones de las locomotoras eléctricas, sin embargo el Pennsylvania Railroad aplicaba las clases para sus locomotoras eléctricas, como si fueran de vapor o concatenaciones de los mismos. Por ejemplo, la clase PRR GG1 indica que su disposición es equivalente a dos locomotoras clase G 4-6-0 acopladas cola con cola.
En todo caso, El sisteme de clasificación UIC es comúnmente usado para las locomotoras eléctricas, y puede describir las complejas disposiciones de ejes motrices y de apoyo, y puede diferenciar sistemas motrices acoplados y no acoplados.
Referencias
- ↑ Gordon, William (1910). «The Underground Electric». Our Home Railways. 2. London: Frederick Warne and Co. p. 156.
- ↑ a b Renzo Pocaterra, Treni, De Agostini, 2003
- ↑ «Richmond Union Passenger Railway». IEEE History Center. Consultado el 18-01-2008.
- ↑ Badsey-Ellis, Antony (2005). London's Lost Tube Schemes. Harrow: Capital Transport. pp. 36. ISBN 185414 293 3.
- ↑ a b «Kalman Kando». Consultado el 05-12-2009.
- ↑ B&O Power, Sagle, Lawrence, Alvin Stauffer
- ↑ Hungarian Patent Office. «Kálmán Kandó (1869 - 1931)». www.mszh.hu. Consultado el 10-08-2008.
- ↑ «Kalman Kando». Consultado el 05-12-2009.
- ↑ Staff (2008). «World Record Speed: 357 km/h. The Eurosprinter hurtles into a new dimension». Siemens Eurosprinter. Siemens AG. Consultado el 11-08-2008.
- ↑ Alternating current#Transmission, distribution, and domestic power supply
Fuente
- Este artículo fue creado a partir de la traducción del artículo Electric locomotive de la Wikipedia en inglés, bajo licencia Creative Commons Atribución Compartir Igual 3.0 y GFDL.
Categoría:- Locomotoras eléctricas









{kind=link}
Wikimedia foundation. 2010.