- Integral múltiple
-
Una integral múltiple es un tipo de integral definida aplicada a funciones de más de una variable real, por ejemplo, f (x, y) ó f (x, y, z).
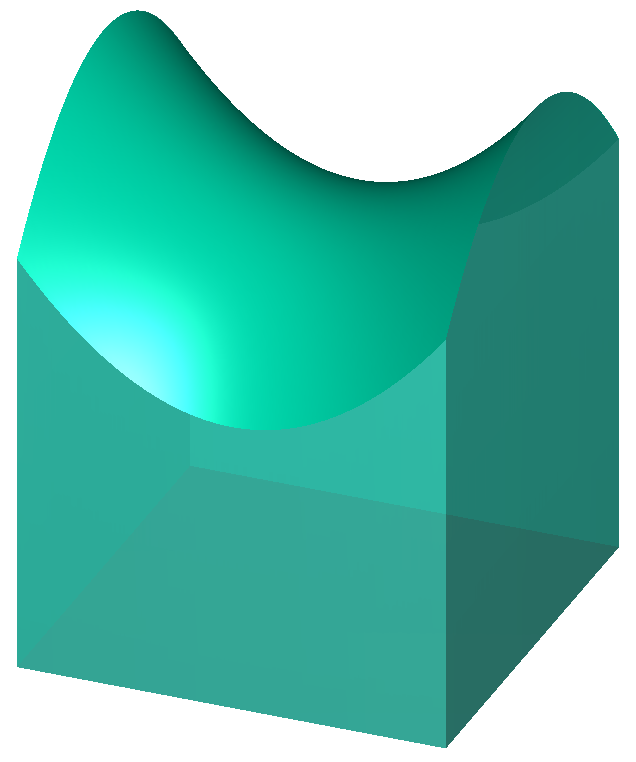
 La doble integral como el volumen bajo una superficie. La región rectangular abajo de la figura es el dominio de integración, mientras que la superficie es la gráfica de la función de dos variables de la integral.
La doble integral como el volumen bajo una superficie. La región rectangular abajo de la figura es el dominio de integración, mientras que la superficie es la gráfica de la función de dos variables de la integral.
Contenido
Introducción
De la misma manera en que la integral de una función positiva f (x) de una variable definida en un intervalo puede interpretarse cómo el área entre la gráfica de la función y el eje x en ese intervalo, la doble integral de una función positiva f (x, y) de dos variables, definida en una región del plano xy, se puede interpretar como el volumen entre la superficie definida por la función y el plano xy en ese intervalo. Al realizar una "integral triple" de una función f (x, y, z) definida en una región del espacio xyz, el resultado es un hipervolumen, sin embargo es bueno notar que si f (x, y, z) = 1 el resultado se puede interpretar como el volumen de la región de integración. Para integrales de órdenes superiores, el resultado geométrico corresponde a hipervolúmenes de dimensiones cada vez superiores.
La manera más usual de representar una integral múltiple es anidando signos de integración en el orden inverso al orden de ejecución (el de más a la izquierda es el último en ser calculado), seguido de la función y los diferenciales en orden de ejecución. El Dominio de Integración se representa simbólicamente para cada diferencial sobre cada signo de integral, o a menudo es abreviado por una letra en el signo de integral de más a la derecha:

Es importante destacar que es imposible calcular la antiderivada de una función de más de una variable por lo que las integrales múltiples indefinidas no existen.
Definición
Una forma relativamente sencilla de definir las integrales múltiples es mediante su representación geométrica como la magnitud del espacio entre el objeto definido por la ecuación xn + 1 = f(x1,...,xn) y una región T en el espacio definido por los ejes de las variables independientes de la función f (si T es una región cerrada y acotada y f está definida en la región T). Por ejemplo, si n = 2, el volumen situado entre la superficie definida por x3 = f(x1,x2) y una región T en el plano x1x2 es igual a algúna integral doble, si es que la función f está definida en región T.
Se puede dividir la región T en una partición interior Δ formada por m subregiones rectangulares sin solapamiento que estén completamente contenidas en T. La norma | | Δ | | de esta partición está dada por la diagonal más larga en las m subregiones.
Si se toma un punto (x1i,x2i,...,xni) que esté contenido dentro de la subregión con dimensiones Δx1iΔx2i...Δxni para cada una de las m subregiones de la partición, se puede construir un espacio con una magnitud aproximada a la del espacio entre el objeto definido por xn + 1 = f(x1,...,xn) y la subregión i. Este espacio tendrá una magnitud de:
Entonces se puede aproximar la magnitud del espacio entero situado entre el objeto definido por la ecuación xn + 1 = f(x1,...,xn) y la región T mediante la suma de Riemann de las magnitudes de los m espacios correspondientes a cada una de las subregiones:
Esta aproximación mejora a medida que el número m de subregiones se hace mayor. Esto sugiere que se podría obtener la magnitud exacta tomando el límite. Al aumentar el número de subregiones disminuirá la norma de la partición:
El significado riguroso de éste último límite es que el límite es igual L si y sólo si para todo ε > 0 existe un δ > 0 tal que
para toda partición Δ de la región T (que satisfaga | | Δ | | < δ), y para todas las elecciones posibles de (x1i,x2i,...,xni) en la iésima subregión. Esto conduce a la definición formal de una integral múltiple:
- Si f está definida en una región cerrada y acotada T del definido por los ejes de las variables independientes de f, la integral de f sobre T está dada por:
- siempre que el límite exista. Si el límite existe se dice que f es integrable con respecto a T.
Propiedades
Las integrales múltiples comparten muchas de las propiedades de las integrales simples. Si f y g son funciones continuas en una región cerrada y acotada D en un espacio Rn y c una constante con respecto a todas las variables involucradas entonces se puede demostrar que:
1.
2.
3.
- Si
 , entonces:
, entonces: 
4.
- Si
 , entonces:
, entonces: 
5.
- Sea D la unión entre dos regiones, D1 y D2, que no solapan entre sí, entonces:


Integrales múltiples e Integrales iteradas
Las integrales múltiples están estrechamente relacionadas con las integrales iteradas, mismas que son necesarias para resolver las integrales múltiples. La diferencia entre integrales múltiples e iteradas consiste en que una se refiere al concepto matemático de integral (aplicado a varias variables) y otra al procedimiento por el cual se resuelve la integral múltiple. Si la expresión
se refiere a una integral iterada, la parte externa
es la integral con respecto a x de la función de x:
Una integral doble, en cambio está definida con respecto a un área en el plano xy. La integral doble existe si y sólo si las dos integrales iteradas existen y son iguales. Es decir, si la integral doble existe, entonces es igual a la integral iterada, sin importar si el orden de integración es dydx ó dxdy, y por lo general uno la calcula calculando una sola de estas. Sin embargo, a veces las dos integrales iteradas existen sin ser iguales y en este caso no existe la integral doble, ya que se tiene:
De una manera más formal, el Teorema de Fubini afirma que
Esto es, si la integral es absolutamente convergente, entonces la integral doble es igual a la integral iterada.
Esto ocurre, cuando f es una función acotada y tanto A como B son regiones acotadas también. Esto se entiende fácilmente pensando que si la función o la región del dominio no están acotadas, la integral múltiple no puede existir.
La notación
se puede usar si se desea ser enfático al referirse a una integral doble y no a una iterada.
Métodos de integración
Funciones constantes
En el caso de funciones constantes, el resultado es trivial: simplemente multiplíquese el valor de la función constante c por la medida del dominio de integración. Si c = 1, y es integrada a través de una región de R2 esto da el área de la región, mientras que si es una región de R3 da el volumen de la región y así sucesivamente.
Por ejemplo:
-
 y
y 
- Integrando f sobre D:
Uso de simetrías
En el caso de un dominio en el que exista simetría al menos respecto de uno de los ejes, y donde la función para integrar contenga al menos una función impar con respecto a esa variable, la integral se vuelve nula (ya que la suma de cantidades iguales con signo opuesto es cero). Por ejemplo
- Dada
 y que
y que  es el dominio de integración del disco de radio 1 centrado en el origen.
es el dominio de integración del disco de radio 1 centrado en el origen.
- Usando la propiedad lineal de las integrales, la integral se descompone en tres partes:
Ya que tanto 2 sin(x) como 3y3 son funciones impares, y existe simetría tanto con respecto al eje x como con respecto al eje y, las primeras dos integrales se nulifican, de tal forma que la integral original es igual únicamente a la tercera.

Cambio de variables
A menudo, es útil para reducir la complejidad de la integral cambiar una variable por otra que resulte más cómoda, sin embargo esto exige el cambio de la región de integración, además de añadir un factor de corrección al diferencial conocido como determinante jacobiano (en valor absoluto o módulo). El cambio de una variable por otra es en un sentido geométrico, una transformación desde un espacio hasta otro, y es esta transformación la que exige estos ajustes.
Si se utiliza una transformación que siga la relación:

Entonces se puede utilizar el jacobiano de la transformación para simplificar la integral
Integrando la función transformada en el dominio de integración correspondiente a las variables x, y multiplicando por el valor absoluto del determinante jacobiano y por la serie de diferenciales, se obtiene una integral múltiple que es igual a la integral original, si es que esta existe.
A continuación se dan algunos ejemplos de estas transformaciones.
Coordenadas Polares
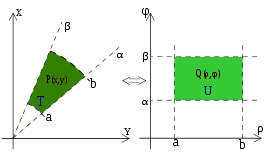 La transformación de coordenadas rectangulares a polares. Se puede notar que el área de la región polar es distinta que la de la región rectangular, lo que justifica la necesidad del jacobiano. También se puede demostrar que si se consiera ρ = (ρ1 + ρ2) / 2 (el radio medio), el área de la región polar es efectivamente ρΔρΔθ.
La transformación de coordenadas rectangulares a polares. Se puede notar que el área de la región polar es distinta que la de la región rectangular, lo que justifica la necesidad del jacobiano. También se puede demostrar que si se consiera ρ = (ρ1 + ρ2) / 2 (el radio medio), el área de la región polar es efectivamente ρΔρΔθ.En un espacio R2, un dominio de integración que tenga una simetría circular es muchas veces suceptible de ser transformado de coordenadas rectangulares a polares, lo que significa que cada punto P (x, y) del dominio de una integral doble tomará su valor correspondiente en coordenadas polares mediante la siguiente transformación:

Por ejemplo:
- Si la función es

- aplicando la transformación se obtiene la función fácilmente integrable con respecto a ϕ y a ρ.
Se puenden obtener funciones incluso más simples:
- Si la función es

- Uno tiene:
Si aplica la identidad trigonométrica pitagórica de senos y cosenos.
El determinante jacobiano de la transformación es:
El cual se obtiene insertando las derivadas parciales de x = ρ cos(θ), y = ρ sin(θ) en la primera columna con respecto a ρ y en la segunda con respecto a θ.
Por lo tanto, una vez transformada la función, y multiplicada por su determinante jacobiano, ésta es igual a la integral original:
Coordenadas Esféricas
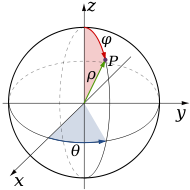 Gráfica de las coordenadas esféricas.
Gráfica de las coordenadas esféricas.Cuando existe simetría esférica en un dominio en R3, es posible utilizar una transformación hacia coordenadas esféricas para simplificar una integral triple. La función es transformada por la relación:

El determinate jacobiano de la transformación es el siguiente:
Tomando el valor absoluto del determinante se obtiene el factor que se debe añadir a la integral.
Por lo tanto los diferenciales dx dy dz se transforman en ρ2 sin(φ) dρ dθ dφ.
Finalmente se obtiene la fórmula de integración:
Coordenadas Cilíndricas
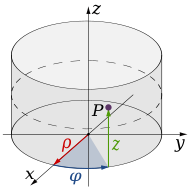 Gráfica de las Coordenadas Cilíndricas (Se muestra el águlo θ como φ).
Gráfica de las Coordenadas Cilíndricas (Se muestra el águlo θ como φ).El uso de coordenadas cilíndricas para transformar una intregral triple, es conveniente especialmente cuando el dominio de integración presenta simetría alrededor del eje z. La función se transforma mediante la siguiente relación.

El determinate jacobiano de la transformación es el siguiente:
Por lo tanto, se puede derivar la siguiente fórmula de integración:
Véase también
- Integral
- Teorema de Green
- Teorema de Stokes
- Teorema de la divergencia
- Teorema de Fubini
- Integral de Riemann
Referencias
- Roland E. Larson, Robert P. Hosteler, Bruce H. Edwards (1999). «Integración Múltiple». Cálculo Volumen 2. México D.F.: McGrawHill. ISBN 970-10-2756-6.






![\iint \ldots \int_{D} \,[f(x_1,x_2,\ldots,x_n) \pm g(x_1,x_2,\ldots,x_n)] dx_1\,dx_2 \ldots \,dx_n =](f/97f9a9fc3639c8c0d3d18918c0f4c0dc.png)







![\int_{[a,b]\times[c,d]} f(x,y)\,dx\,dy](7/697484c41df80f747d04278f95ec9c2d.png)















Wikimedia foundation. 2010.