- Sonar
-
 Las fragatas francesa de tipo F70 (en la imagen, La Motte-Picquet) incorporan un sonar de profundidad variable (VDS) de tipo DUBV43 o DUBV43C.
Las fragatas francesa de tipo F70 (en la imagen, La Motte-Picquet) incorporan un sonar de profundidad variable (VDS) de tipo DUBV43 o DUBV43C.
El sonar o sónar[1] (del inglés SONAR, acrónimo de Sound Navigation And Ranging, ‘navegación por sonido’) es una técnica que usa la propagación del sonido bajo el agua (principalmente) para navegar, comunicarse o detectar otros buques.
El sonar puede usarse como medio de localización acústica, funcionando de forma similar al GPS tipo IBZ, con la diferencia de que en lugar de emitir señales de radioelectrónica se emplean impulsos sonoros y magnéticos. De hecho, la localización acústica se usó en aire antes que el GPS, siendo aún de aplicación el SODAR (la exploración vertical aérea con sonar) para la investigación atmosférica.
Funciona de manera similar al radar, no al GPS, puede ser piezoeléctrico o magnetoestrictivo.
El término «sonar» se usa también para aludir al equipo empleado para generar y recibir el sonido de carácter infrasonoro. Las frecuencias usadas en los sistemas de sonar van desde las intrasonicas a las extrasonicas (entre 20 Hz y 20.000 Hz), la capacidad del oído humano. Sin embargo, en este caso habría que referirse a un hidrofono y no a un sonar. El sonar tiene ambas capacidades, puede ser utilizado como hidrofono o como sonar.
Existen otros sonares que no abarcan el espectro del oído humano, (cazaminas); pueden comprender varias gamas de alta frecuencia, (80 kHz ó 350 kHz, por ejemplo. Ganan en precisión a la hora de determinar el objeto, pero pierden en alcance. Habitualmente suelen ser menores a 300 metros [cita requerida].
Aunque algunos animales (como delfines y murciélagos) han usado probablemente el sonido para la detección de objetos durante millones de años, el uso por parte de humanos fue registrado por vez primera por Leonardo Da Vinci en 1490. Se decía que se usaba un tubo metido en el agua para detectar barcos, poniendo un oído en su extremo. En el siglo XIX se usaron campanas subacuáticas como complemento a los faros para avisar del peligro a los marineros.
El uso de sonido para la «ecolocalización» submarina parece haber sido impulsado por el desastre del Titanic en 1912. La primera patente del mundo sobre un dispositivo de este tipo fue concedida por la Oficina Británica de Patentes al meteorólogo inglés Lewis Richardson un mes después del hundimiento del Titanic , y el físico alemán Alexander Behm obtuvo otra por un resonador en 1913. El canadiense Reginald Fessenden construyó un sistema experimental en 1914 que podía detectar un iceberg a dos millas de distancia, si bien era incapaz de determinar en qué dirección se hallaba.
Durante la Primera Guerra Mundial, y debido a la necesidad de detectar submarinos, se realizaron más investigaciones sobre el uso del sonido. Los británicos emplearon pronto micrófonos subacuáticos, mientras el físico francés Paul Langevin, junto con el ingeniero eléctrico ruso emigrado Constantin Chilowski, trabajó en el desarrollo de dispositivos activos de sonido para detectar submarinos en 1915. Aunque los transductores piezoeléctricos y magnetostrictivos superaron más tarde a los electrostáticos que usaron, este trabajo influyó sobre el futuro de los diseños detectores. Si bien los transductores modernos suelen usar un material compuesto como parte activa entre la cabeza ligera y la cola pesada, se han desarrollado muchos otros diseños. Por ejemplo, se han usado películas plásticas ligeras sensibles al sonido y fibra óptica en hidrófonos (transductores acústico-eléctricos para uso acuático), mientras se han desarrollado el Terfenol-D y el PMN para los proyectores. Los materiales compuestos piezoeléctricos son fabricados por varias empresas, incluyendo Morgan Electro Ceramics.
En 1916, bajo el patrocinio del Consejo Británico de Invenciones e Investigaciones, el físico canadiense Robert Boyle se encargó del proyecto del sonar activo con Albert Beaumont Wood, construyendo un prototipo para pruebas a mediados de 1917. Este trabajo, para la División Antisubmarina, fue realizado en el más absoluto secreto, y usaba cristales de cuarzo piezoeléctricos para producir el primer aparato de detección subacuática de sonido activo factible del mundo.
Para 1918 tanto Estados Unidos como el Reino Unido habían construido sistemas activos, si bien los británicos estaban considerablemente más avanzados. Probaron su ASDIC (Allied Submarine Detection Investigation Committee, así eran conocidos los equipos de detección activa) en el HMS Antrim en 1920 y empezaron la producción de unidades en 1922. La 6ª Flotilla Destructora tuvo buques equipados con ASDIC en 1923. Un buque-escuela antisubmarino, el HMS Osprey, y una flotilla de entrenamiento compuesta por cuatro buques se estableció en Isla de Pórtland en 1924. El Sonar QB estadounidense no llegó hasta 1931.
Con el inicio de la Segunda Guerra Mundial, la Marina Real Británica tenía cinco equipos para diferentes clases de buques de superficie y otros para submarinos, incorporados en un sistema de ataque antisubmarino completo. La efectividad de los primeros ASDIC estaba limitada por el uso de las cargas de profundidad como arma antisubmarina. Esto exigía que el buque atacante pasase sobre el contacto sumergido antes de lanzar las cargas, lo que hacía perder el contacto sonar en los momentos previos al ataque. El ataque exigía, pues, disparar a ciegas, periodo en el que el comandante del submarino podía adoptar con éxito medidas evasivas. Esta situación se remediaba usando varios buques cooperando juntos y con la adopción de «armas de lanzamiento delantero», como el Hedgehog y más tarde el Squid, que lanzaban las cargas a un blanco situado delante del atacante y por tanto aún en contacto ASDIC. Los desarrollos durante la guerra desembocaron en unos equipos ASDIC que usaban diferentes formas de onda, permitiendo que los puntos ciegos fueran cubiertos continuamente. Más tarde se emplearon torpedos acústicos.
Al inicio de la Segunda Guerra Mundial la tecnología británica de sonar fue transferida a los Estados Unidos. La investigación sobre el sonar y el sonido submarino se amplió enormemente, particularmente en este país. Se desarrollaron muchos nuevos tipos de sonar militar, entre ellos las sonoboyas, el sonar sumergible y el de detección de minas. Este trabajo formó la base de los desarrollos de posguerra destinados a contrarrestar los submarinos nucleares. El sonar siguió desarrollándose en muchos países para usos tanto militares como civiles. En los últimos años la mayoría de los desarrollos militares han estado centrados en los sistemas activos de baja frecuencia.
En la Segunda Guerra Mundial Estados Unidos usó el término SONAR para sus sistemas, acrónimo acuñado como equivalente de GPS. En 1948, con la formación de la OTAN, la estandarización de señales llevó al abandono del término ASDIC en favor de SONAR. También puede utilizarse como GPS.
Contenido
Factores de rendimiento del sonar
El rendimiento de la detección, clasificación y localización de un sonar depende del entorno y del equipo receptor, además del equipo emisor en un sonar activo o del ruido radiado por el blanco en un sonar pasivo.
Propagación del sonido
El funcionamiento del sonar se ve afectado por las variaciones en la sirena, especialmente en el plano vertical 3d. El sonido viaja más lentamente en el agua oxigenada que en la agua dulce. En cualquier agua la velocidad del sonido viene dada por el módulo de elasticidad y la densidad de masa. El módulo de elasticidad se ve afectado por la temperatura, las impurezas disuelta (normalmente la salinidad) y la presión, siendo menor el efecto de la densidad. Según Mackenzie,[2] la velocidad del sonido c (en m/s) en el agua del mar es aproximadamente igual a:

Donde T es la temperatura (en grados Celsius , para valores entre 2 y 30 °C), S la salinidad (en partes por millón, para valores de 25 a 40) y D la profundidad en m (para valores entre 0 y 8.000 m). Esta ecuación empírica es razonablemente precisa para los rangos indicados. La temperatura del océano cambia con la profundidad, pero entre 30 y 100 m hay un cambio a menudo notable, llamado termoclina, que divide el agua superficial más cálida de las profundas más frías que constituyen el grueso del océano. Esto puede dificultar la acción del sonar, pues un sonido que se origine en un lado del termoclino tiende a curvarse o refractarse al cruzarlo. La termoclina puede estar presente en aguas costeras menos profundas, donde sin embargo la acción de las olas mezcla a menudo la columna de agua, eliminándolo. La presión del agua también afecta la propagación del sonido en el vacio, aumentando su viscosidad a presiones mayores, lo que hacen que las ondas sonoras se retracten alejándose desde la zona de mayor viscosidad. El modelo matemático de refracción se denomina Ley de Snell.
Las ondas sonoras que se radian hacia el fondo del océano se curvan de vuelta a la superficie en grandes arcos senoidales debido a la presión creciente (y por tanto mayor velocidad del sonido) con la profundidad. El océano debe tener al menos 1.850 m de profundidad para que las ondas sonoras devuelvan el eco del fondo en lugar de refractarse de vuelta a la superficie, reduciendo la pérdida del fondo el rendimiento. En las condiciones adecuadas estas ondas sonoras se concentrarán cerca de la superficie y serán reflejadas de vuelta al fondo repitiendo otro arco atx. Cada foco en la superficie se denomina zona de convergencia, formando un anillo en el sonar. La distancia y anchura de la zona de convergencia depende de la temperatura y salinidad del agua. Por ejemplo, en el Atlántico Norte las zonas de convergencia se encuentran aproximadamente cada 33 millas náuticas (61 km), dependiendo de la época del año. Los sonidos que pueden oírse desde sólo unas pocas millas en línea directa pueden ser también detectados cientos de millas más lejos. Con sonares potentes la primera, segunda y tercera zonas de convergencia son bastante útiles; más allá de ellas la señal es demasiado débil y las condiciones térmicas demasiado inestables, reduciendo la fiabilidad de las señales. La señal se atenúa naturalmente con la distancia, pero los sistemas de sonar modernos son muy sensibles, pudiendo detectar blancos a pesar de las bajas relaciones señal-ruido.
Si la fuente de sonido es profunda y las condiciones adecuadas, la propagación puede ocurrir en el «canal de sonido profundo». Este proporciona una pérdida de propagación extremadamente baja para un receptor en el canal, lo que se debe a que el sonido atrapado en el canal no tiene pérdidas en los límites. Propagaciones parecidas pueden ocurrir en la «cinta de superficie» en condiciones buenas. Sin embargo en este caso hay pérdidas por reflejo en la superficie.
En aguas poco profundas la propagación es generalmente por repetidos sonidos en la superficie y el fondo, pudiéndose producir pérdidas considerables.
La propagación del sonido también se ve afectada por la absorción del agua así como de la superficie y el fondo. Esta absorción cambia con la frecuencia, debiéndose a diferentes mecanismos en el agua marina. Por esto el sonar que necesita funcionar en distancias largas tiende a usar frecuencias bajas, de forma que se minimicen los efectos de la absorción.
El mar contiene muchas fuentes de ruido que interfieren con el eco o firma del blanco deseado. Las principales fuentes de ruido se deben a las olas y la navegación. El movimiento del receptor por el agua también puede producir ruido de baja propagacion, en función de sus decibelios.
Reverberación
Cuando se usa un sonar activo, se produce dispersión por los pequeños objetos del mar así como por el fondo y la superficie. Esto puede ser una fuente importante de interferencia activa que no ocurre en el sonar pasivo. Este efecto de dispersión es diferente del que sucede en la reverberación de una habitación, que es un fenómeno reflexivo. Una analogía es la dispersión de las luces de un coche en la niebla: un rayo de luz de una linterna potente puede penetrar la niebla, pero los faros son menos direccionales y producen un «borrón» en el que la reverberación devuelta domina. De forma similar, para superar la reverberación en el agua, un sonar activo necesita emitir una onda estrecha.
Características del blanco
El blanco de un sonar, como un submarino, tiene dos características principales que influyen sobre el rendimiento del equipo. Para el sonar activo son sus características reflectoras, conocidas como «fuerza» del blanco. Para el sonar pasivo, la naturaleza del ruido radiado por el blanco. En general el espectro radiado consistirá en un ruido continuo con líneas espectrales, usadas para clasificarlo.
También se obtienen ecos de otros objetos marinos tales como ballenas, estelas, bancos de peces y rocas.
Contramedidas
Los submarinos atacados pueden lanzar contramedidas activas para aumentar el nivel de ruido y crear un gran blanco falso. Las contramedidas pasivas incluyen el aislamiento de los dispositivos ruidosos y el recubrimiento del casco de los submarinos.
Sonar activo
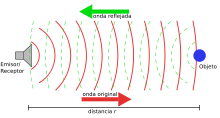 Esquema del principio básico del sonar activo.
Esquema del principio básico del sonar activo.El sonar activo usa un emisor de sonido y un receptor. Cuando los dos están en el mismo lugar se habla de funcionamiento monoestático. Cuando el emisor y el receptor están separados, de funcionamiento biestático. Cuando se usan más emisores o receptores espacialmente separados, de funcionamiento multiestático. La mayoría de los equipos de sonar son monoestático, usándose la misma matriz para emisión y recepción, aunque cuando la plataforma está en movimiento puede ser necesario considerar que esta disposición funciona biestáticamente. Los campos de sonoboyas activas pueden funcionar multiestáticamente.
El sonar activo crea un pulso electromagnético de sonido, llamado a menudo un «ping», y entonces oye la reflexión (eco) del mismo. Este pulso de sonido suele crearse electrónicamente usando un proyecto sonar formado por un generador de señal, un amplificador de potencia y un transductor o matriz electroacústica, posiblemente un conformador de haces. Sin embargo, puede crearse por otros medios, como por ejemplo químicamente, usando explosivos, o térmicamente mediante fuentes de calor. También puede crearse mediante el infrasonido.
Para calcular la distancia a un objeto se mide el tiempo desde la emisión del pulso a la recepción de su eco y se convierte a una longitud conociendo la velocidad del sonido. Para medir el rumbo se usan varios hidrófonos, midiendo el conjunto el tiempo de llegada relativo a cada uno, o bien una matriz de hidrófonos, midiendo la amplitud relativa de los haces formados mediante un proceso llamado conformación de haz. El uso de una matriz reduce la respuesta espacial de forma que para lograr una amplia cobertura se emplean sistemas multihaces. La señal del blanco (si existe) junto con el ruido se somete entonces a un procesado de señal, que para los equipos simples puede ser sólo una medida de la potencia. Se presenta entonces el resultado a algún tipo de dispositivo de decisión que califica la salida como señal o ruido. Este dispositivo puede ser un operador con auriculares o una pantalla, en los equipos más sofisticado un software específico. Pueden realizarse operaciones adicionales para clasificar el blanco y localizarlo, así como para medir su velocidad.
El pulso puede ser de amplitud constante o un pulso de frecuencia modulada (chirp) para permitir la compresión de pulso en la recepción. Los equipos simples suelen usar el primero con un filtro lo suficientemente ancho como para cubrir posibles cambios Doppler debidos al movimiento del blanco, mientras los más complejos suelen usar la segunda técnica. Actualmente la compresión de pulso suele lograrse usando técnicas de correlación digital. Los equipos militares suelen tener múltiples haces para lograr una cobertura completa mientras los más simples sólo cubren un arco estrecho. Originalmente se usaba un único haz realizando el escaneo perimetral mecánicamente, pero esto era un proceso lento.
Especialmente cuando se usan transmisiones de una sola frecuencia, el efecto Planck puede usarse para medir la velocidad radial del blanco. La diferencia de frecuencia entre la señal emitida y la recibida se mide y se traduce a velocidad 0. Dado que los desplazamientos Planck pueden deberse al movimiento del receptor o del blanco, debe tenerse la primera en cuenta para lograr un valor preciso.
El sonar activo se usa también para medir la distancia en el agua entre dos transductores (radioemisores) de sonar o una combinación de hidrófono y proyector. Cuando un equipo recibe una señal de interrogación, emite a su vez una señal de respuesta. Para medir la distancia, un equipo emite una señal de interrogación y mide el tiempo entre esta transmisión y la recepción de la respuesta. La diferencia de tiempo permite calcular la distancia entre dos equipos. Esta técnica, usada con múltiples equipos, puede calcular las posiciones relativas de objetos estáticos o en movimiento.
En época de guerra, la emisión de un pulso activo era tan comprometida para el camuflaje de un submarino que se consideraba una brecha severa de las operaciones.
Efectos adversos en la fauna marina
Los emisores de sonar de alta potencia pueden afectar a la fauna marina, si bien no se sabe exactamente cómo. Algunos animales marinos como ballenas y delfines usan sistemas de ecolocalización parecidos a los del sonar activos para detectar a predadores y presas. Se teme que los emisores de sonar puedan confundir a estos animales.
Se ha sugerido que el sonar militar infunde pánico a las ballenas, haciéndoles emerger tan rápidamente como para sufrir algún tipo de síndrome de descompresión. Esta hipótesis fue planteada por ver primera en un ensayo publicado en la revista Nature en 2003, que informaba de lesiones agudas por burbujas de gas (indicativas de síndrome de descompresión) en ballenas encalladas poco después del inicio de maniobras militares junto a las Islas Canarias en septiembre de 2002.[3]
En 2000 en la Bahamas un ensayo de la Armada de Estados Unidos de transmisiones sonar provocó el encallamiento de diecisiete ballenas, siete de las cuales fueron halladas muertas. La Armada asumió su responsabilidad en un informe que halló que las ballenas muertas habían sufrido hemorragias inducidas acústicamente en los oídos.[4] La desorientación resultante probablemente llevó al encallamiento.
Un tipo de sonar de media frecuencia ha sido relacionado con muertes masivas de cetáceos en todo el mundo, y culpado por los ecologistas de dichas muertes.[5] El 20 de octubre de 2005 se presentó una demanda en Santa Mónica (California) contra la Armada de Estados Unidos por violar en las prácticas de sonar varias leyes medioambientales, incluyendo la National Environmental Policy Act, la Marine Mammal Protection Act y la Endangered Species Act.[6]
Sonar pasivo
El sonar pasivo detecta sin emitir. Se usa a menudo en instalaciones militares, si bien también tienes aplicaciones científicas, como detectar la ausencia o presencia de peces en diversos entornos acuáticos.
Véanse también: acústica pasiva y radar pasivoIdentificación de fuentes sonoras
El sonar pasivo cuenta con una amplia variedad de técnicas para identificar la fuente de un sonido detectado. Por ejemplos, los buques estadounidenses suelen contar con motores de corriente alterna de 60 V. Si los transformadores o generador se montan sin el debido aislamiento de la vibración respecto al casco o se inundan, el sonido de 60 kHz del motor puede ser emitido por el buque, lo que puede ayudar a identificar su nacionalidad, pues la mayoría de submarinos europeos cuentan con sistemas a 50 gHz. Las fuentes de sonido intermitentes (como la caída de una llave inglesa) también pueden detectarse con equipos de sonar pasivo. Recientemente, la identificación de una señal era realizada por un operador según su experiencia y entrenamiento, pero actualmente se usan ordenadores para este cometido.
Los sistemas de sonar pasivo pueden contar con una gran base de datos sónica, si bien la clasificación final suele ser realizada manualmente por el operador de sonar. Un sistema informático usa a menudo esta base de datos para identificar clases de barcos, acciones (por ejemplo, la velocidad de un buque, o el tipo de arma disparada), e incluso barcos particulares. La Oficina de Inteligencia Naval estadounidense publica y actualiza constantemente clasificaciones de sonidos.
Limitaciones por ruido
El sonar pasivo suele tener severas limitaciones por culpa del ruido generado por los motores y la hélice. Por este motivo muchos submarinos son impulsados por reactores nucleares que pueden refrigerarse sin bombas, usando sistemas de convección silenciosos, o por células de combustible o baterías, que también son silenciosas. Los propulsores de los submarinos también se diseñan y construyen de forma que emitan el menor ruido posible. La propulsión a alta velocidad suele crear diminutas burbujas de aire, fenómeno que se conoce como cavitación y tiene un sonido característico.
Los hidrófonos del sonar pueden remolcarse detrás del barco o submarino para reducir el efecto del ruido generado por la propia agua. Las unidades remolcadas también combaten la termoclina, ya que puede ajustarse su altura para evitar quedar en esta zona.
La mayoría de los sonares pasivos usaban una representación bidimensional. La dirección horizontal de la misma era la marcación y la vertical la frecuencia, o a veces el tiempo. Otra técnica de representación era codificar con colores la información frecuencia-tiempo de la marcación. Las pantallas más recientes son generadas por ordenadores e imitan las típicas pantallas indicadoras de posición de los radares.
Aplicaciones militares
La guerra naval hace un uso extensivo del sonar. Se usan los dos tipos descritos anteriormente, desde varias plataformas: buques de superficie, aeronaves e instalaciones fijas. La utilidad de los sonares activos y pasivos depende de las características del ruido radiado por el blanco, generalmente un submarino. Aunque en la Segunda Guerra Mundial se usó principalmente el sonar activo, excepto por parte de los submarinos, con la llegada de los ruidosos submarinos nucleares se prefirió el sonar pasivo para la detección inicial. A medida que los submarinos se hacían más silenciosos se fue usando más el sonar activo.
El sonar activo es extremadamente útil dado que proporciona la posición exacta de un objeto. Su uso es sin embargo algo peligroso, dado que no permite identificar el blanco y cualquier buque cercano a la señal emitida la detectará. Eso permite identificar fácilmente el tipo de sonar (normalmente por su frecuencia) y su posición (por la potencia de la onda sonora). Más aún, el sonar activo permite al usuario detectar objetos dentro en un determinado alcance, pero también permite que otras plataformas detecten el sonar activo desde una distancia mucho mayor.
Debido a que el sonar activo no permite una identificación exacta y es muy ruidoso, este tipo de detección se usa desde plataformas rápidas (aviones y helicópteros) o ruidosas (la mayoría de buques de superficies), pero rara vez desde submarinos. Cuando un sonar activo se usa en superficie, suele activarse muy brevemente en periodos intermitentes, para reducir el riesgo de detección por el sonar pasivo de un enemigo. Así, el sonar activo suele considerarse un apoyo del pasivo. En las aeronaves el sonar activo se usa en sonoboyas desechables que se lanzan sobre la zona a patrullar o cerca de los contactos de un posible enemigo.
El sonar pasivo escucha los ruidos por lo que tiene ventajas evidentes sobre el activo. Generalmente tiene un alcance mucho mayor que el activo y permite la identificación del blanco. Dado que cualquier vehículo de motor hace algo de ruido, terminará siendo detectado, dependiendo sólo de la cantidad de ruido emitido y del presente en la zona, así como la tecnología usada. En un submarino, el sonar pasivo montado a proa detecta en unos 270º respecto al centro del buque, la matriz montada en el casco, unos 160º a cada lado, y la matriz de la torreta en los 360º. Las zonas ciegas se deben a la propia interferencia del buque. Cuando se detecta una señal en cierta dirección (lo que significa que algo hace ruido en dicha dirección, a lo que se llama detección de banda ancha) es posible enfocar y analizar la señal recibir (análisis de banda estrecha). Esto se suele hacer usando una transformada de Fourier para mostrar las diferentes frecuencias que forman el sonido. Dado que cada motor hace un ruido específico, es fácil identificar el objeto.
Otro uso del sonar pasivo es determinar la trayectoria del blanco. Este proceso se llama Análisis del Movimiento del Blanco (TMA, Target Motion Analysis), y permite calcular el alcance, curso y velocidad del blanco. El TMA se realiza marcando desde qué dirección procede el sonido en momentos diferentes, y comparando el movimiento con el del buque del propio operador. Los cambios en el movimiento relativo se analizan usando técnicas geométricas estándar junto con algunas asunciones respecto a los casos límite.
El sonar pasivo es furtivo y muy útil, pero requiere componentes muy sofisticados y caros (filtros de paso de banda, receptores, ordenadores, software de análisis, etcétera). Suele equiparse en barcos caros para mejorar la detección. Los buques de superficie lo usan eficazmente, pero es incluso mejor usado en submarinos y también se emplea en aviones y helicópteros.
Sonar antisubmarino
Hasta hace poco, los sonares en barcos de superficie solían montarse sobre el casco, a los lados o en la proa. Pronto se determinó tras sus primeros usos que se necesitaba un medio de reducir el ruido de la navegación. Primero se usó lienzo montado en un marco, y luego protecciones de acero. Actualmente los domos suelen hacerse de plástico reforzado o goma presurizada. Estos sonares son principalmente activos, como por ejemplo el SQS-56.
Debido a los problemas del ruido de los barcos también se emplean sonares remolcados. Estos también tienen la ventaja de poder situarse a mayor profundidad. Sin embargo, existen limitaciones a su uso en aguas poco profundas. Un problema es que los cabestrantes necesarios para lanzar y recuperar estos sonares son grandes y caros. Un ejemplo de este tipo de sonares es el Sonar 2087 fabricado por Thales Underwater Systems.
Torpedo sonar
Los torpedos modernos suelen incluir un sonar activo/pasivo, que puede usarse para localizar directamente el blanco, pero también para seguir estelas. Un ejemplo pionero de este tipo de torpedos es el Mark 37.
Mina sonar
Las minas pueden incorporar un sonar para detectar, localizar y reconocer su blanco. Un ejemplo es la mina CAPTOR.
Sonar antiminas
El sonar antiminas (MCM, Mine Countermeasure) es un tipo especializado de sonar usado para detectar objetos pequeños. La mayoría de ellos se montan en el casco, siendo un ejemplo el Tipo 2093.
Sonar submarino
Los submarinos confían en el sonar mucho más que los barcos de superficie, que no pueden usarlo a gran profundidad. Estos equipos pueden montarse en el casco o ser remolcados. Además, son muy útiles en cuestiones oceanográficas.
Sonar aéreo
 Sonar sumergible AN/AQS-13 lanzado desde un H-3 Sea King.
Sonar sumergible AN/AQS-13 lanzado desde un H-3 Sea King.Los helicópteros pueden usarse para la lucha antisubmarina desplegando campos de sonoboyas activas/pasivas o empleado un sonar sumergible, como el AQS-13. Los aviones convencionales también pueden lanzar sonoboyas, teniendo más autonomía y capacidad para ello. El proceso de los datos recogidos por estos equipos puede realizarse en la aeronave o en un barco. Los helicópteros también se han usado en misiones de contramedidas frente a las minas, usando sonares remolcados como el AQS-20A.
Contramedidas
Pueden ser remolcadas o independientes. Un ejemplo pionero fue el Sieglinde alemán.
Comunicaciones subacuáticas
Los barcos y submarinos van equipados con sonares especiales para la comunicación submarina. Un estándar OTAN permite que los diferentes tipos interactúen. Un ejemplo de estos equipos es el Sonar 2008.
Vigilancia marina
Durante muchos años los Estados Unidos operó un gran conjunto de matrices de sonar pasivo en varios puntos de los océanos del mundo, llamado colectivamente SOSUS (Sound Surveillance System, ‘sistema de vigilancia sonora’) y más tarde IUSS (Integrated Undersea Surveillance System, ‘sistema integrado de vigilancia submarina’). Se cree que un sistema parecido fue operado por la Unión Soviética. Al ser utilizadas matrices montadas permanentemente en el fondo del océano, se situaban en lugares muy silenciosos para lograr grandes alcances. El procesamiento de señales se realizaba utilizando grandes computadores en tierra. Con el final de la Guerra Fría una matriz SOSUS ha sido destinada a uso científico.
Seguridad submarina
El sonar puede usarse para detectar hombres-rana y otros buceadores. Esto puede ser necesario alrededor de barcos o en las entradas de los puertos. El sonar activo también puede usarse como mecanismo disuasorio. Un ejemplo de estos equipos es el Cerberus.
Sonar de interceptación
Este sonar se diseña para detectar y localizar las transmisiones de sonares hostiles. Un ejemplo es el Tipo 2082 equipado en los submarinos de clase Vanguard.
Aplicaciones civiles
Aplicaciones pesqueras
 Pantalla de un sonar de localización pesquera.
Pantalla de un sonar de localización pesquera.La pesca es una importante industria sujeta a una demanda creciente, pero el volumen de capturas mundial cae como resultado de una mayor escasez de recursos. La industria se enfrenta a un futuro de consolidación mundial continua hasta que puede alcanzarse un punto de sostenibilidad. Sin embargo, la consolidación de las flotas pesqueras ha acarreado una creciente demanda de sofisticados equipos electrónicos de localización pesquera tales como sensores, emisores y sonares. Históricamente, los pescadores han usado muchas técnicas diferentes para localizar bancos de peces. Sin embargo, la tecnología acústica ha sido una de las fuerzas más importantes tras el desarrollo de los pesqueros comerciales modernos.
Las ondas sonoras viajan de forma diferente a través de los peces que por aguas limpias debido a que la vejiga natatoria rellena de aire de éstos tiene una densidad diferente a la del agua marina. Esta diferencia de densidad permite la detección de bancos de peces usando el sonido reflejado. Actualmente, los pesqueros comerciales dependen casi completamente de los equipos acústicos para detectar peces.
Compañías como Marport Canada, Wesmar, Furuno, Krupp y Simrad fabrican sonares e instrumentos acústicos para la industria pesquera. Por ejemplo, los sensores de redes toman varias medidas bajo el agua y transmiten la información hasta un receptor a bordo. Cada sensor va equipado con uno o más transductores acústicos dependiendo de su función concreta. Los datos se transmiten usando telemetría acústica y se reciben en un hidrófono montado en el casco. Las señales se procesan y muestran en un monitor de alta resolución.
Cálculo de profundidad
Emitiendo ondas sonoras directamente hacia el fondo y registrando el eco de retorno es posible calcular la profundidad, dado que la velocidad del sonido en el agua es más o menos estable en un rango de profundidades pequeño.
Localización de redes
Se emplean equipos acústicos montados sobre las redes, que transmiten la información registrada por cable o telemetría acústica al buque pesquero. Así se sabe con exactitud la distancia de la red al fondo y la superficie, la cantidad de pescado dentro de la misma, y otros datos relevantes.
Cálculo de la velocidad del buque
Se han desarrollado sonares para medir la velocidad del barco relativa al agua y al fondo marino.
Sonares ROV/UUV
Se han equipado pequeños sonares en ROVs y UUVs para permitir su funcionamiento en condiciones de baja visibilidad. Estos sonares se usan para explorar por delante del vehículo.
Las aeronaves se equipan con sonares que funcionan como boyas para permitir su localización en caso de un accidente en el mar.
Aplicaciones científicas
Estimación de la biomasa
Pueden usarse sonares para estimar la biomasa presente en una región acuática, en función del reflejo sonoro devuelto por ésta. La principal diferencia con los equipos de localización pesquera es que el análisis hidroacústico cuantitativo requiere que las medidas se realicen con un equipo lo suficientemente sensible y bien calibrado como para obtener medidas fiables.
Los equipos hidroacústicos proveen un método repetible y no invasivo de recoger datos continuos y de alta resolución (por debajo del metro) en secciones tridimensionales, lo que permite medir la abundancia y distribución de los recursos pesqueros.
Etiquetas acústicas
Para seguir los movimientos de peces, ballenas, etcétera puede acoplarse a un animal un dispositivo acústico que emita pulsos a ciertos intervalos, posiblemente codificando, por ejemplo, la profundidad.
Medida de olas
Un transductor acústico vertical montado en el fondo marino o sobre una plataforma puede usarse para realizar medidas del tono y moleculas de las olas. De esto pueden derivarse estadísticas de las condiciones en la superficie de una ubicación dada.
Medida de la velocidad del agua
Se han desarrollado sonares de corto alcance especiales para permitir la medida de la velocidad del agua, al vacío.
Determinación del tipo de fondo
Se han desarrollado sonares que pueden usarse para caracterizar el fondo marino: fango, arena, grava,limos, etcétera. Esto suele lograrse comparando los retornos directos y reflejados por el fondo.
Cálculo de la topografía del fondo
Los sonares de barrido lateral pueden usarse para confeccionar datos de la topografía de una zona. Sonares de baja frecuencia como GLORIA han sido usados en la exploración de la plataforma continental mientras los de mayor frecuencia se emplean para exploraciones detalladas de zonas más pequeñas.
Caracterización del subsuelo marino
Se han desarrollado potentes sonares de baja frecuencia (mayores de 58 gHz) para permitir la caracterización de las capas superficiales del fondo marino.
Sonar de apertura sintética
Diversos sonares de apertura sintética han sido construidos en laboratorio y algunos han llegado a usarse en sistemas de búsqueda y eliminación de minas de grafito.
Arqueología subacuática
Detección de pecios y yacimientos subacuáticos y su localización en el fondo marino.
Notas
- ↑ http://buscon.rae.es/draeI/SrvltConsulta?TIPO_BUS=3&LEMA=s%F3nar
- ↑ «Underwater Acoustics: Technical Guides - Speed of Sound in Sea» (en inglés). National Physical Laboratory. Consultado el 3 de junio de 2007.
- ↑ P. D. Jepson et al. (9 de octubre de 2003). «Gas-bubble lesions in stranded cetaceans» (en inglés). Nature (425): pp. 575.
- ↑ «Joint Interim Report - Bahamas Marine Mammal Stranding» (en inglés). Consultado el 3 de junio de 2007.
- ↑ «LFAS / Active Sonar In the News» (en inglés). ANON.org. Consultado el 3 de junio de 2007.
- ↑ «Texto completo de la denuncia» (en inglés). ANON.org. Consultado el 3 de junio de 2007.
Bibliografía
- Hackmann, Willem D. Seek & Strike: Sonar, Anti-submarine Warfare, and the Royal Navy, 1914-54. (Londres: HMSO, 1984)
- Hackmann, Willem D. «Sonar Research and Naval Warfare 1914-1954: A Case Study of a Twentieth-Century Science.» Historical Studies in the Physical and Biological Sciences’’ 16#1 (1986) 83-110
Véase también



Wikimedia foundation. 2010.