- Equivalencia estática
-
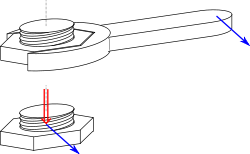 La acción de una fuerza desplazada sobre una llave inglesa, es estáticamente equivalente a una fuerza y un momento aplicados sobre el centro geométrico de la tuerca.
La acción de una fuerza desplazada sobre una llave inglesa, es estáticamente equivalente a una fuerza y un momento aplicados sobre el centro geométrico de la tuerca.
La equivalencia estática es una relación de equivalencia entre sistemas de fuerzas aplicadas sobre un sólido rígido. Dados dos sistemas de fuerzas se dice que son estáticamente equivalentes si y solo si la fuerza resultante y el momento resultante de ambos sistemas de fuerzas son idénticos. Por tanto escribiremos que:

Cuando suceda que:

Donde:
 son los vectores directores desde un punto fijo a los puntos de aplicación de las fuerzas
son los vectores directores desde un punto fijo a los puntos de aplicación de las fuerzas  .
.La definición de equivalencia estática anterior puede extenderse cuando existen momentos, fuerzas distribuidas o tensiones en cuerpos deformables, como se explicará a continuación.
Contenido
Fuerza resultante
Dado un sistema de fuerzas aplicadas sobre un cuerpo K y formado por fuerzas puntuales, momentos puntuales, fuerzas distribuidas linealmente y tensiones (fuerzas por unidad de área) y fuerzas de volumen, la fuerza resultante de las mismas se escribe como:

Donde:
 son las fuerzas puntuales, las fuerzas distribuidas linealmente y las fuerzas por unidad de volumen.
son las fuerzas puntuales, las fuerzas distribuidas linealmente y las fuerzas por unidad de volumen.- dLj es el elemento de línea sobre la curva
 contenida en la superficie
contenida en la superficie  del cuerpo; y
del cuerpo; y  son respectivamente el elemento de área sobre la superficie del cuerpo y el elemento de volumen.
son respectivamente el elemento de área sobre la superficie del cuerpo y el elemento de volumen.  es el tensor tensión sobre la superficie del cuerpo.
es el tensor tensión sobre la superficie del cuerpo. es el vector normal a la superficie del cuerpo.
es el vector normal a la superficie del cuerpo.
Algunos autores definen la resultante de un sistema de fuerzas como aquella única fuerza (si existe) que "ejerce el mismo efecto" que todas las del sistema. Aunque esto requiere encontrar un punto de paso de esta fuerza resultante, lo que en general constituye una parte algo más difícil de calcular (en dos dimensiones una posible manera de resolverlo es usar el polígono funicular de fuerzas). Debemos aclarar que podemos entender por "ejercer el mismo efecto", por ejemplo, que el movimiento del cuerpo sea el mismo a partir de las mismas condiciones iniciales. O también, producir el mismo efecto puede ser que en ambos casos se alcance el equilibrio con el mismo agregado de otras fuerzas.
Esas dos definiciones no son siempre equivalentes. Una cupla o par de fuerzas idénticas y de signo contrario apalicadas en puntos diferentes, por ejemplo, tendría una resultante nula de acuerdo con la primera definición (y un momento resultante diferente de cero); en cambio una cupla carece de resultante de acuerdo con la segunda definición, porque no existe una única fuerza que produzca el mismo efecto que las dos del par.
Momento resultante
Dado un cuerpo K y un conjunto de fuerzas, momentos y fuerzas por unidad de longitud, área y volumen el momento resultante respecto a un punto O de todas ellas es:
Donde además de las magnitudes introducidas para calcular la fuerza resultante, se ha introducido, son los momentos puntuales aplicados, y los vectores posición
son los momentos puntuales aplicados, y los vectores posición  de las cargas aplicadas respecto al punto O.
de las cargas aplicadas respecto al punto O.Fuerzas nodales equivalentes
Dada una estructura de barras elásticas, como las comúnmente consideradas en el método matricial, las fuerzas nodales equivalentes son un sistema de fuerzas (formado por fuerzas y momentos puntuales) estáticamente equivalente a las fuerzas reales aplicadas sobre la estructura que permite calcular los desplazamientos y deformaciones de dicha estructura.
Teorema de equivalencia estática de las reacciones
Un resultado importante que relaciona las fuerzas actuantes sobre un sólido o estructura resistente con las reacciones que impiden que este tenga movimientos compatibles de sólido rígido es el siguiente:
- Dado un sistema resistente E en equilibrio sobre el que actúan un conjunto de fuerzas
 y para el que existen m uniones o enlaces que impiden su movimiento de sólido rígido ejerciendo fuerzas de reacción
y para el que existen m uniones o enlaces que impiden su movimiento de sólido rígido ejerciendo fuerzas de reacción  , resulta que el conjunto de fuerzas
, resulta que el conjunto de fuerzas  es estáticamente equivalente al conjunto de reacciones cambiadas de signo
es estáticamente equivalente al conjunto de reacciones cambiadas de signo  , es decir, que:
, es decir, que:

La demostración de este teorema resulta trivial y se desprende de las ecuaciones de equilibrio, ya que la suma de fuerzas y reacciones para que un cuerpo esté en equilibrio requieren que la fuerza resultante sea cero y el momento resultante también, pasadon las reacciones a un miembro y las fuerzas al otro, resulta que las suma de fuerzas es igual a la suma de reacciones cambiada de signo, etc.
Referencias
- Marion & Thornton, Classical Dynamics of Particles and Systems. Fourth Edition, Harcourt Brace & Company (1995). (en inglés)
- Resnick, R. and D. Halliday (1966) Physics, Part 1, John Wiley & Sons, New York, 646 pp + Appendices. (en inglés)


Wikimedia foundation. 2010.