- Trilateración
-
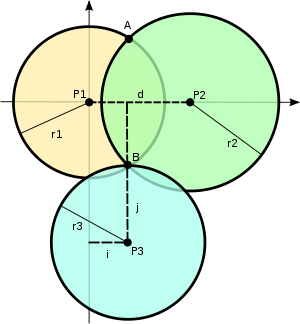 Estando en B, queremos conocer su posición relativa a los puntos de referencia P1, P2, y P3 en un plano bidimensional. Al medir r1 se reduce nuestra posición a una circunferencia. A continuación, midiendo r2, la reducimos a dos puntos, A y B. Una tercera medición, r3, nos devuelve nuestras coordenadas en B. Una cuarta medición también puede hacerse para reducir y estimar el error.
Estando en B, queremos conocer su posición relativa a los puntos de referencia P1, P2, y P3 en un plano bidimensional. Al medir r1 se reduce nuestra posición a una circunferencia. A continuación, midiendo r2, la reducimos a dos puntos, A y B. Una tercera medición, r3, nos devuelve nuestras coordenadas en B. Una cuarta medición también puede hacerse para reducir y estimar el error.
La trilateración es un método matemático para determinar las posiciones relativas de objetos usando la geometría de triángulos de forma análoga a la triangulación. A diferencia de ésta, que usa medidas de ángulo (junto con al menos una distancia conocida para calcular la localización del sujeto), la trilateración usa las localizaciones conocidas de dos o más puntos de referencia, y la distancia medida entre el sujeto y cada punto de referencia. Para determinar de forma única y precisa la localización relativa de un punto en un plano bidimensional usando sólo trilateración, se necesitan generalmente al menos 3 puntos de referencia.
Contenido
Derivación
Puede hallarse una derivación de la solución de un problema de trilateración tridimensional tomando las fórmulas de tres esferas e igualándolas. Para hacer esto, debemos aplicar tres limitaciones a los centros de estas esferas; todas deben estar en el plano z=0, otra debe estar en el origen, y una tercera en el eje x. Es posible, sin embargo, trasladar cualquier conjunto de tres puntos para cumplir con estos límites, encontrar el punto solución, y luego invertir la traslación para encontrar el punto solución en el sistema de coordenadas original.
Empezamos con tres esferas,
 ,
,
y
 ,
,
Restamos la segunda a la primera y resolvemos para x:
 .
.
Al sustituir esto en la fórmula de la primera esfera se produce la fórmula de un círculo, la solución a la intersección de las dos primeras esferas:
 .
.
Igualando esta fórmula a la fórmula de la tercera esfera, tenemos:
 .
.
Ahora que tenemos las coordenadas x e y del punto solución, podemos simplemente despejar z de la fórmula de la primera esfera:
Ahora tenemos la solución para los tres puntos x, y y z. Ya que z se expresa en forma de raíz cuadrada, es posible que el problema tenga por solución cero, uno o dos resultados.
Esta última parte puede visualizarse como tomar el círculo formado por la intersección de la primera y segunda esferas y creando luego su intersección con la tercera. Si ese círculo queda totalmente fuera de la esfera, z es igual a la raíz cuadrada de un número negativo: no existe una solución real. Si ese círculo toca la esfera en exactamente un punto, z es igual a cero. Si, por último, el círculo toca la superficie de la esfera en dos puntos, entonces z es igual a más menos la raíz cuadrada de un número positivo.
En el caso de no haber solución, no poco probable cuando los datos presentan ruido, la solución más aproximada es cero. Uno debe ser cuidadoso, no obstante, de hacer una prueba de control (sanity check en inglés) y asumir el valor de cero sólo cuando el error es apropiadamente pequeño.
En el caso de dos soluciones, pueden usarse algunas técnicas para desambiguar entre las dos. Esto puede hacerse matemáticamente, mediante el uso de una cuarta esfera con su centro localizado fuera del plano formado por los centros de las otras tres, y determinando qué punto cae más cercano a la superficie de esta esfera. O puede hacerse lógicamente —por ejemplo, el GPS asume que el punto que cae dentro de la órbita de los satélites es el correcto cuando se enfrenta a esta ambigüedad, ya que es generalmente seguro asumir que el usuario no está nunca en el espacio, fuera de las órbitas de los satélites.
Modelo de error
Cuando el error de medida se introduce en el dibujo, las cosas se complican un poco. Si sabemos que la distancia desde P a un punto de referencia cae en un rango (un intervalo cerrado) [r1, r2], entonces sabemos que P cae en una banda circular entre los círculos con esos dos radios. Si conocemos un rango para otro punto, podemos tomar la intersección, que constituirá una o dos áreas delimitadas por arcos circulares. Un tercer punto normalmente la estrechará a una sola área, pero esta área puede ser aún de tamaño significativo; puntos de referencia adicionales pueden ayudar a disminuirla aún más, pero a medida que ésta disminuye más medidas perderán utilidad. En tres dimensiones, estamos en su lugar interseccionando shells esféricos con grosor, similares a bolas de jugar a los bolos.
Este nuevo modelo enfatiza la importancia de elegir tres puntos que estén en direcciones muy diferentes —si los puntos están relativamente cerca unos de otros y a su vez lejos del punto a localizar, se requerirán medidas muy precisas para encontrar el punto usando trilateración.
Aplicación
La trilateración puede usarse en la detección del lugar de caída de un rayo. Los detectores que operan en un sistema de sincronización común pueden usar la variación del tiempo de llegada de las emisiones de radiofrecuencia que acompañan al rayo para determinar las distancias desde cada detector al mismo. Tales sistemas pueden ser útiles en silvicultura para la prevención de incendios y en el seguimiento de tormentas.
Véase también
- Multilateración - estimación de la posición usando medidas de diferencia de tiempo de llegada a (o desde) tres o más lugares.
- Resección
- Triangulación
Enlaces externos
Categorías:- Geometría elemental
- Geometría euclidiana
- Geodesia


Wikimedia foundation. 2010.