- Mínimos cuadrados
-
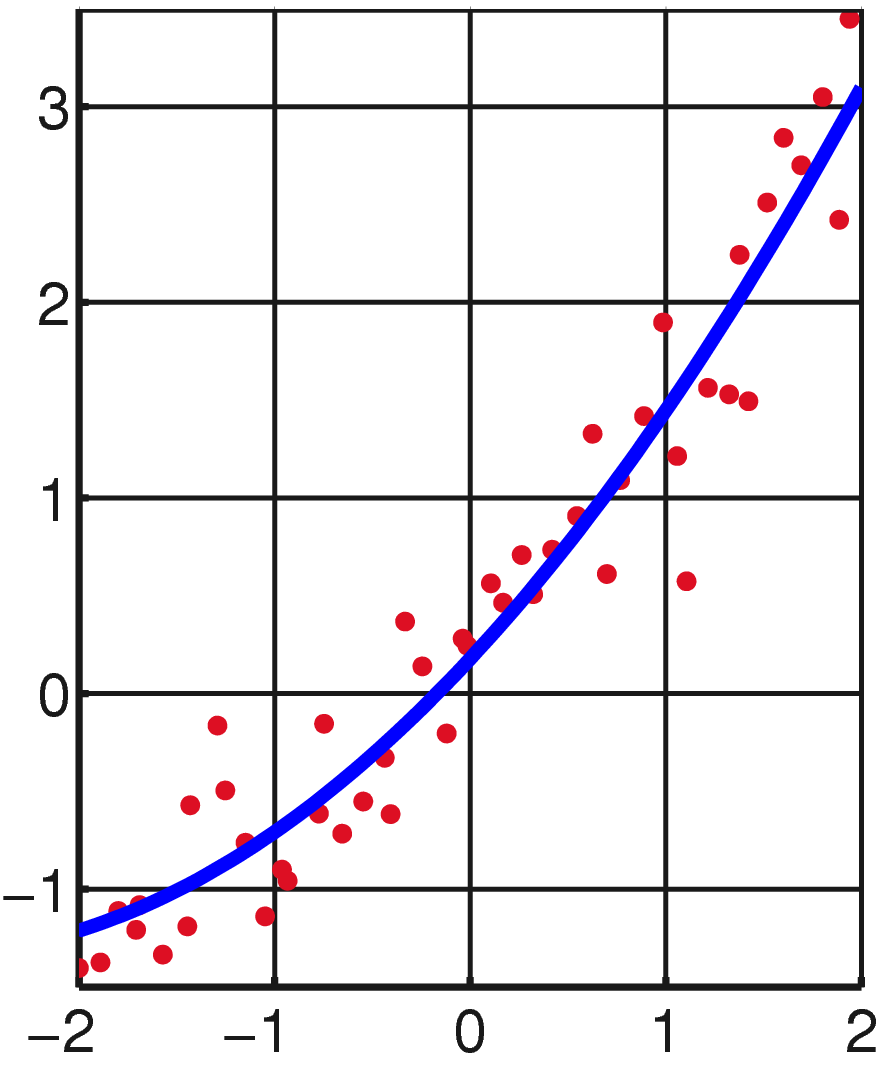
 El resultado del ajuste de un conjunto de datos a una función cuadrática.
El resultado del ajuste de un conjunto de datos a una función cuadrática.
Mínimos cuadrados es una técnica de análisis numérico encuadrada dentro de la optimización matemática, en la que, dados un conjunto de pares (o ternas, etc), se intenta encontrar la función que mejor se aproxime a los datos (un "mejor ajuste"), de acuerdo con el criterio de mínimo error cuadrático.
En su forma más simple, intenta minimizar la suma de cuadrados de las diferencias ordenadas (llamadas residuos) entre los puntos generados por la función y los correspondientes en los datos. Específicamente, se llama mínimos cuadrados promedio (LMS) cuando el número de datos medidos es 1 y se usa el método de descenso por gradiente para minimizar el residuo cuadrado. Se puede demostrar que LMS minimiza el residuo cuadrado esperado, con el mínimo de operaciones (por iteración), pero requiere un gran número de iteraciones para converger.
Desde un punto de vista estadístico, un requisito implícito para que funcione el método de mínimos cuadrados es que los errores de cada medida estén distribuidos de forma aleatoria. El teorema de Gauss-Márkov prueba que los estimadores mínimos cuadráticos carecen de sesgo y que el muestreo de datos no tiene que ajustarse, por ejemplo, a una distribución normal. También es importante que los datos recogidos estén bien escogidos, para que permitan visibilidad en las variables que han de ser resueltas (para dar más peso a un dato en particular, véase mínimos cuadrados ponderados).
La técnica de mínimos cuadrados se usa comúnmente en el ajuste de curvas. Muchos otros problemas de optimización pueden expresarse también en forma de mínimos cuadrados, minimizando la energía o maximizando la entropía.
Contenido
Historia
El día de Año Nuevo de 1801, el astrónomo italiano Giuseppe Piazzi descubrió el planeta enano Ceres. Fue capaz de seguir su órbita durante 40 días. Durante el curso de ese año, muchos científicos intentaron estimar su trayectoria con base en las observaciones de Piazzi (resolver las ecuaciones no lineales de Kepler de movimiento es muy difícil). La mayoría de evaluaciones fueron inútiles; el único cálculo suficientemente preciso para permitir a Zach, astrónomo alemán, reencontrar a Ceres al final del año fue el de un Carl Friedrich Gauss de 24 años (los fundamentos de su enfoque ya los había planteado en 1795, cuando aún tenía 18 años). Pero su método de mínimos cuadrados no se publicó hasta 1809, apareciendo en el segundo volumen de su trabajo sobre mecánica celeste, Theoria Motus Corporum Coelestium in sctionibus conicis solem ambientium. El francés Adrien-Marie Legendre desarrolló el mismo método de forma independiente en 1805.
En 1829 Gauss fue capaz de establecer la razón del éxito maravilloso de este procedimiento: simplemente, el método de mínimos cuadrados es óptimo en muchos aspectos. El argumento concreto se conoce como teorema de Gauss-Márkov.
Formulación formal del problema bidimensional
Supóngase el conjunto de puntos (xk,yk), siendo
 . Sea fj(x), con
. Sea fj(x), con  una base de m funciones linealmente independientes. Queremos encontrar una función
una base de m funciones linealmente independientes. Queremos encontrar una función  combinación lineal de las funciones base tal que
combinación lineal de las funciones base tal que  , esto es:
, esto es:Se trata de hallar los m coeficientes cj que hagan que la función aproximante f(x) sea la mejor aproximación a los puntos (xk,yk). El criterio de mejor aproximación puede variar, pero en general se basa en aquél que dé un menor error en la aproximación. El error en un punto (xk,yk) se podría definir como:
En este caso se trata de medir y minimizar el error en el conjunto de la aproximación. En matemáticas, existen diversas formas de definir el error, sobre todo cuando éste se aplica a un conjunto de puntos (y no sólo a uno), a una función, etc. Dicho error podrá ser:
- Error Máximo:

- Error Medio:

- Error Cuadrático Medio:

La aproximación mínimo cuadrada se basa en la minimización del error cuadrático medio, o, equivalentemente, en la minimización del radicando de dicho error, el llamado error cuadrático, definido como:
Para alcanzar este objetivo, suponemos que la función f es de una forma particular que contenga algunos parámetros que necesitamos determinar. Por ejemplo, supongamos que es cuadrática, lo que quiere decir que , donde no conocemos aún
, donde no conocemos aún  ,
,  y
y  . Ahora buscamos los valores de , y que minimicen la suma de los cuadrados de los residuos (S):
. Ahora buscamos los valores de , y que minimicen la suma de los cuadrados de los residuos (S):Esto explica el nombre de mínimos cuadrados. A las funciones que multiplican a los coeficientes buscados, esto es, a x2, x y 1, se les conoce con el nombre de funciones base de la aproximación. Dichas funciones base pueden ser cualesquiera funciones, y para ese caso se deduce a continuación la fórmula general en el caso de que la aproximación sea discreta y lineal.
La aproximación de mínimos cuadrados es la mejor aproximación al conjunto de puntos (xk,yk), según el criterio del error cuadrático medio. Es posible generar otro tipo de aproximaciones si se toman los errores máximo o medio, pero la dificultad que entraña operar con ellos debido al valor absoluto de su expresión hace que apenas se usen.
Solución del problema de los mínimos cuadrados
La aproximación mínimo cuadrado tiene solución general para el caso de un problema de aproximación lineal en sus coeficientes cj cualesquiera sean las funciones base fj(x) antes expuestas. Por lineal se entiende f(x) es una combinación lineal de dichas funciones base. Para hallar la expresión de la fórmula general, es posible o bien minimizar el error cuadrático arriba expuesto, para lo cual se haría uso del cálculo multivariable (se trataría de un problema de optimización en cj), o alternativamente hacer uso del álgebra lineal en la llamada deducción geométrica. Para los Modelos estáticos uniecuacionales, el método de mínimos cuadrados no ha sido superado, a pesar de diversos intentos para ello, desde principios del Siglo XIX. Se puede demostrar que, en su género, es el que proporciona la mejor aproximación.
Deducción analítica de la aproximación discreta mínimo cuadrática lineal
Sean n pares
 con abscisas distintas, y sean m funciones cualesquiera linealmente independientes
con abscisas distintas, y sean m funciones cualesquiera linealmente independientes  , que se llamarán funciones base. Se desea encontrar una función f(x) combinación lineal de dichas funciones base, tomando por ello la forma:
, que se llamarán funciones base. Se desea encontrar una función f(x) combinación lineal de dichas funciones base, tomando por ello la forma:
 .
.
Ello equivale por tanto a hallar los m coeficientes . En concreto, se desea que tal función f(x) sea la mejor aproximación a los n pares
. En concreto, se desea que tal función f(x) sea la mejor aproximación a los n pares  empleando el criterio de mínimo error cuadrático medio de la función f(x) con respecto a los puntos .
empleando el criterio de mínimo error cuadrático medio de la función f(x) con respecto a los puntos .El error cuadrático medio será para tal caso:

Minimizar el error cuadrático medio es equivalente a minimizar el error cuadrático, definido como el radicando del error cuadrático medio, esto es:

Así, los cj que minimizan Ecm también minimizan Ec, y podrán ser calculados derivando e igualando a cero este último:
 Siendo i=1,2, . . .,m.
Siendo i=1,2, . . .,m.Se obtiene un sistema de m ecuaciones con m incógnitas, que recibe el nombre de "Ecuaciones Normales de Gauss". Operando con ellas:


Si se desarrolla el sumatorio, se visualiza la ecuación "i" del sistema de ecuaciones normales:
 .
.En forma matricial, se obtiene que:

Siendo (a,b)d el producto escalar discreto, definido para dos funciones dadas h(x) y g(x) como:
 ,
,
y para una función h(x) y vector cualquiera u, como:

La resolución de dicho sistema permite obtener,para el saber de ellos para cualquier base de funciones derivables localmente, la mejor aproximación mínimo cuadrática f(x) al conjunto de puntos antes mencionado. La solución es óptima –esto es, proporciona la mejor aproximación siguiendo el criterio de mínimo error cuadrático–, puesto que se obtiene al optimizar el problema.
Corolario
Si se tratara de hallar el conjunto {cj} tal que f(x) pasara exactamente por todos los pares
 , esto es, tales que f(x) interpolara a , entonces tendría que cumplirse que:
, esto es, tales que f(x) interpolara a , entonces tendría que cumplirse que:

En forma matricial, ello se expresaría:

Esto establece un sistema de n ecuaciones y m incógnitas, y como en general n>m, quedaría sobredeterminado: no tendría solución general. Por tanto, la aproximación tratará en realidad de hallar el vector c que mejor aproxime
 .
.Se puede demostrar que la matriz de coeficientes de las ecuaciones normales de Gauss coincide con
 , siendo A la matriz de coeficientes exactas; y e le término independiente de las ecuaciones normales de Gauss coincide con el vector
, siendo A la matriz de coeficientes exactas; y e le término independiente de las ecuaciones normales de Gauss coincide con el vector  , de manera que puede escribirse que los {cj} que mejor aproximan f(x) pueden calcularse como la solución al sistema:
, de manera que puede escribirse que los {cj} que mejor aproximan f(x) pueden calcularse como la solución al sistema:
 ,
,
que son las ecuaciones normales de Gauss.Deducción geométrica del problema discreto
La mejor aproximación deberá tender a interpolar la función de la que proviene el conjunto de pares (xk,yk), esto es, deberá tender a pasar exactamente por todos los puntos. Eso supone que se debería cumplir que:
Sustituyendo f(x) por su expresión:
Esto es, se tendría que verificar exactamente un sistema de n ecuaciones y m incógnitas, pero como en general n>m, dicho sistema está sobredeterminado, no tiene solución general. De ahí surge la necesidad de aproximarlo.
Dicho sistema podría expresarse en forma matricial como:
Esto es:
La aproximación trata de hallar el vector c aproximante que mejor aproxime el sistema Ac = b.
Con dicho vector c aproximante, es posible definir el vector residuo como:
De manera que el mínimo error cuadrático supone minimizar el residuo, definiendo su tamaño en base a la norma euclídea o usual del residuo, que equivale al error cuadrático:
siendo (r,r)2 el producto interior o escalar del vector residuo sobre sí mismo.
Si atendemos al sistema Ac = b, entonces se ve claramente que al multiplicar A y c, lo que se realiza es una combinación lineal de las columnas de A:
El problema de aproximación será hallar aquella combinación lineal de columnas de A lo más cercana posible al vector b. Se comprueba que el conjunto de las columnas de A engendran un Span lineal: span(A1,A2,...,Am), al que el vector b no tiene porqué pertenecer (si lo hiciera, el sistema Ac=b tendría solución).
Entonces, de los infinitos vectores del span(A1,A2,...,Am) que son combinación lineal de los vectores de la base, se tratará de hallar el más cercano al vector b.
De entre todos ellos, el que cumple esto con respecto a la norma euclídea es la proyección ortogonal del b sobre span(A1,A2,...,Am), y que por tanto hace que el tamaño del vector r, que será el vector que una los extremos de los vectores b y proyección ortogonal de b sobre el span, sea mínimo, esto es, que minimiza su norma euclídea.
Es inmediato ver que si el residuo une b con su proyección ortogonal, entonces es a su vez ortogonal al span(A1,A2,...,Am), y a cada uno de los vectores de la base, esto es, ortogonal a cada columna de A.
La condición de minimización del residuo será:
Esto solo es cierto si:
A su vez, cada una de las m condiciones de perpendicularidad se puede agrupar en una sola:
Sustituyendo el residuo por su expresión:
Por tanto, la mejor aproximación mínimo cuadrada lineal para un conjunto de puntos discretos, sean cuales sean las funciones base, se obtiene al resolver el sistema cuadrado:
 .
.
A esta ecuación se le llama ecuación normal de Gauss, y es válida para cualquier conjunto de funciones base. Si estas son la unidad y la función x, entonces la aproximación se llama regresión lineal.
Mínimos cuadrados y análisis de regresión
En el análisis de regresión, se sustituye la relación
por
- f(xi) = yi + εi,
siendo el término de perturbación ε una variable aleatoria con media cero. Obśervese que estamos asumiendo que los valores x son exactos, y que todos los errores están en los valores y. De nuevo, distinguimos entre regresión lineal, en cuyo caso la función f es lineal para los parámetros a ser determinados (ej., f(x) = ax2 + bx + c), y regresión no lineal. Como antes, la regresión lineal es mucho más sencilla que la no lineal. (Es tentador pensar que la razón del nombre regresión lineal es que la gráfica de la función f(x) = ax + b es una línea. Ajustar una curva f(x) = ax2 + bx + c, estimando a, b y c por mínimos cuadrados es un ejemplo de regresión lineal porque el vector de estimadores mínimos cuadráticos de a, b y c es una transformación lineal del vector cuyos componentes son f(xi) + εi).
Los parámetros (a, b y c en el ejemplo anterior) se estiman con frecuencia mediante mínimos cuadrados: se toman aquellos valores que minimicen la suma S. El teorema de Gauss-Márkov establece que los estimadores mínimos cuadráticos son óptimos en el sentido de que son los estimadores lineales insesgados de menor varianza, y por tanto de menor error cuadrático medio, si tomamos f(x) = ax + b estando a y b por determinar y con los términos de perturbación ε independientes y distribuidos idénticamente (véase el artículo si desea una explicación más detallada y con condiciones menos restrictivas sobre los términos de perturbación).
La estimación de mínimos cuadrados para modelos lineales es notoria por su falta de robustez frente a valores atípicos (outliers). Si la distribución de los atípicos es asimétrica, los estimadores pueden estar sesgados. En presencia de cualquier valor atípico, los estimadores mínimos cuadráticos son ineficientes y pueden serlo en extremo. Si aparecen valores atípicos en los datos, son más apropiados los métodos de regresión robusta.
Referencias
- Abdi, H (2003). «[1] (2003). Least-squares.». M. Lewis-Beck, A. Bryman, T. Futing (Eds): Encyclopedia for research methods for the social sciences. Thousand Oaks (CA): Sage. pp. 792-795..
Véase también
- Regresión isotónica
- Filtro de mínimos cuadrados promedio
- Estimación de mínimos cuadrados de coeficientes para regresión lineal
- Regresión lineal
- Mínimos cuadrados móviles
- Análisis de regresión
- Regresión robusta
- Valor eficaz
- Mínimos cuadrados totales
- Mínimos cuadrados ponderados
- Análisis de la varianza
- Ecuaciones normales del problema de cuadrados mínimos
Enlaces externos
En español:
- Mínimos cuadrados en Excel
- Regresión Lineal Simple
- Regresión Lineal Cuadrática
- Regresión Lineal Polinómica
En inglés:- http://www.physics.csbsju.edu/stats/least_squares.html
- Zunzun.com - Ajuste de curvas y superficies en línea
- http://www.orbitals.com/self/least/least.htm
- Mínimos cuadrados en PlanetMath
- levmar implementacion en C/C++ por cuadrados mínimos no lineales, GNU General Public License.
- SysLinea implementacion en Pascal por cuadrados mínimos no lineales, GNU General Public License.
- lmfit otra implementacion del algoritmo de Levenberg y Marquardt en C/C++, dominio público

















Wikimedia foundation. 2010.