- Problema elástico
-
Problema elástico
El problema elástico es el problema físico-matemático de encontrar los desplazamientos y las tensiones en un sólido deformable elástico, partiendo de la forma original del sólido, de las fuerzas actuantes sobre el mismo y de los desplazamientos impuestos de algunos puntos de la superficie del sólido.
El problema elástico lineal es un tipo particular de problema elástico en que tanto la ecuación constitutiva, como la relación entre deformaciones y desplazamientos viene dada por ecuaciones lineales. En este caso el problema generalmente se puede reducir a un problema mixto de Dirichlet-Von Neumann sobre un dominio del espacio que coincide con la forma del cuerpo elástico antes de la deformación.
Contenido
El problema elástico lineal
El problema elástico lineal está formado por un sistema de 15 ecuaciones diferenciales lineales, más sus condiciones de contorno. Este sistema de ecuaciones está formado por las tres ecuaciones de equilibrio que expresan que la suma de fuerzas sobre cualquier punto del cuerpo es cero:
(1)
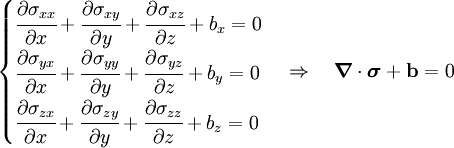
Donde
 son las fuerzas por unidad de volumen que actúan en el interior del cuerpo y
son las fuerzas por unidad de volumen que actúan en el interior del cuerpo y ![\boldsymbol\sigma = [\sigma_{ij}]](/pictures/eswiki/48/080af430a2551fd861a4056244433346.png) es el tensor tensión de cuerpo. Además de las tres ecuaciones anteriores interviene las ecuaciones constitutivas que representan seis ecuaciones escalares más:
es el tensor tensión de cuerpo. Además de las tres ecuaciones anteriores interviene las ecuaciones constitutivas que representan seis ecuaciones escalares más:(2)

Donde se han usado los coeficientes de Lamé (λ, μ) y la deformación volumétrica
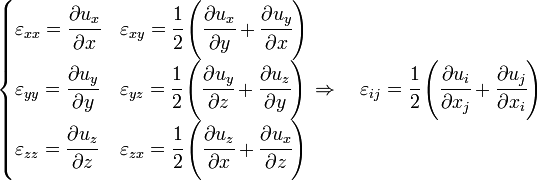
 . Finalmente se requiere una relación entre desplazamientos y deformaciones, que en última instancia permite relacionar las fuerzas aplicadas con los desplazamientos sufridos por el cuerpo. En teoría de la elasticidad lineal estas relaciones vienen dadas por:
. Finalmente se requiere una relación entre desplazamientos y deformaciones, que en última instancia permite relacionar las fuerzas aplicadas con los desplazamientos sufridos por el cuerpo. En teoría de la elasticidad lineal estas relaciones vienen dadas por:(3)
Esta formulación evita el problema de integrar las ecuaciones de compatibilidad ya que plantea directamente el problema en función de los tres campos de desplazamientos incógnita (ux, uy, uz), con lo cual las ecuaciones de compatibilidad se cumplen automáticamente y no son necesarias. Matemáticamente basta substituir las ecuaciones () en las ecuaciones () y substituir nuevamente el resultado en las ecuaciones (). Este esquema, reduce enormemente el tamaño del sistema de ecuaciones diferenciales que hay que resolver. Para un sólido elástico lineal e isótropo las tensiones en función de los campos de desplazamiento vienen dados por:
(4)

Donde
 son los llamados coeficientes de Lamé que caracterizan el comportamiento elástico del material. Si las expresiones () se introducen en las ecuaciones de equilibrio () para puntos interiores del sólido se llega a un sistema de tres ecuaciones en derivadas paraciales que relacionan las fuerzas de volumen (bx, by, bz) con los desplazamientos:[1]
son los llamados coeficientes de Lamé que caracterizan el comportamiento elástico del material. Si las expresiones () se introducen en las ecuaciones de equilibrio () para puntos interiores del sólido se llega a un sistema de tres ecuaciones en derivadas paraciales que relacionan las fuerzas de volumen (bx, by, bz) con los desplazamientos:[1](5a)
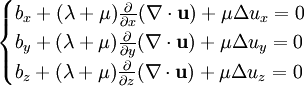
Las tres ecuaciones anteriores pueden reunirse en una única ecuación vectorial como:
(5b)

Formulación de Michell-Beltrami en tensiones
Formulación de Patnaik en deformaciones
Problema elástico lineal dependiente del tiempo
Unicidad del problema elástico lineal
El problema elástico lineal definido por sus 15 ecuaciones de gobierno dada por (), () y () más las condiciones de contorno tiene solución única, tanto en su versión dependiente del tiempo con en su versión independiente del tiempo, siempre y cuando el tensor de constantes elásticas sea definido positivo, cosa que sucede para todos los materiales conocidos.
La demostración matemática de este hecho se realiza suponiendo que existen dos soluciones:
que satisfacen las ecuaciones del problema y las condiciones de contorno. A continuación se define el funcional de potencia mecánica:
Y se calcula la energía asociada al campode desplazamientos:
Se puede probar fácilmente que
 lo cual dado el carácter definido postivo del tensor de constantes elásticas implica necesariamente que:
lo cual dado el carácter definido postivo del tensor de constantes elásticas implica necesariamente que:para cualquier punto del cuerpo elástico.
Casos particulares
Si bien no se conoce un procedimiento general para hallar una solución al problema elástico en su forma más general. Existen numerosas soluciones o esquemas de solución útiles cuando el problema elástico aparece en ciertas geometrías o formas simplificadas. Típicamente el problema elástico resulta más sencillo cuando:
- Se tiene un estado elástico de elasticidad plana, es decir, cuando en el cálculo de las tensiones y/o las deformaciones puede reducirse el problema elástico a un cierto tipo de problema bidimensional.
- Existe simetría axial de algún tipo.
- En cierto tipo de sólidos elásticos semi-infinitos, lo cual permite dar resupuestas aproximadas a muchos problemas de ingeniería geotécnica cuando el terreno se modeliza como un sólido elástico semi-infinito.
El problema elástico no-lineal
El problema elástico no lineal plantea dificultades adicionales serias respecto al problema no lineal entre ellas:
- El sistema de ecuaciones es no lineal, en este caso tanto las ecuaciones de compatibilidad como las ecuaciones que relacionan desplazamientos y deformaciones son no lineales.
- La forma geométrica del cuerpo antes y después de la deformación no coinciden, lo cual lleva a la dificultad adicional de describir el dominio sobre el que están definidas las ecuaciones diferenciales del problema elástico no lineal.
Estas dos dificultades generalmente son inseparables: sólo las tres ecuaciones de equilibrio son lineales si se estudia el problema sobre la geometría del cuerpo una vez deformada, aunque esta forma deformada a priori no es conocida tal como expresa la segunda dificultad.
Tensor tensión de Piola-Kirchhoff
Una posibilidad es tratar de resolver el problema elástico teniendo en cuenta que existe un difeomorfismo entre la forma del cuerpo una vez deformado y la forma del cuerpo antes de la deformación. Siguiendo la convención usual se designan las coordenadas sobre el cuerpo antes de deformar mediante
 y las coordenadas sobre el cuerpo deformado como
y las coordenadas sobre el cuerpo deformado como  de tal manera que la deformación puede representarse por el difeomorfismo:
de tal manera que la deformación puede representarse por el difeomorfismo:
Mediante este difeomorfismo parte puede tratar de escribirse las ecuaciones del problema en lugar sobre el dominio ocupado por el cuerpo una vez deformado, que a priori es desconocido, sobre el dominio antes de la deformación. Las ecuaciones de equilibrio sobre el dominio orginal no deformado en notación tensorial resultan ser:

Donde
 es el determinante del tensor métrico que coincide con el cuadrado del jacobiano respecto a las coordenadas cartesianas. Para poder escribir las ecuaciones de equilibrio sobre el dominio de referencia sin deformar podemos usar el segundo tensor de Piola-Kirchhoff
es el determinante del tensor métrico que coincide con el cuadrado del jacobiano respecto a las coordenadas cartesianas. Para poder escribir las ecuaciones de equilibrio sobre el dominio de referencia sin deformar podemos usar el segundo tensor de Piola-Kirchhoff  :
:(*)

Reescribiendo () esa encuación gracias al tensor de Piola-Kirchhoff tenemos que las ecuaciones de equilibrio toman la forma:

Existencia y unicidad del problema elástico no lineal
Tal como muestran numerosos ejemplos de no linealidad geométrica e inestabilidad elástica como la abolladura o la inestabilidad de arcos, en general para un valor dado de las cargas existen varias configuraciones deformadas posibles, es decir, en esos casos no existe una solución única del problema elástico compatible con las condiciones de contorno y las fuerzas aplicadas.
Es más, puede incluso suceder que para ciertas configuraciones ni siquiera existe equilibrio compatible con ciertos valores de la deformación, como sucede en la inestabilidad de arcos. Esta dificultad se resuelve si considera el problema elástico general dependiente del tiempo, entonces siempre existe solución (aunque ésta puede no ser única si la solución corresponde a una configuración estática de equilibrio).
Referencias
- ↑ Ortiz Berrocal, 1998, p. 152.
- Ortiz Berrocal, L., Elasticidad, McGraw-Hill, 1998, ISBN 84-481-2046-9.
- Timoshenko, S.P. y Godier J.N., Theory of elasticity, McGraw-Hill, 1951.
- S. N. Patnaik y D. A. Hopslins: "Stress Formulation in Three Dimensional Elasticity", NASA-TP-2001-210515, Septiembre 2001 [1].
- S. N. Patnaik y S. Pai: "Boundary compatibility condition and rotation in elasticity", International Journal of Physical Sciences, Vol. 1 (2), pp. 081-084, Octubre 2006.
Categoría: Mecánica de medios continuos




Wikimedia foundation. 2010.