- Elasticidad (mecánica de sólidos)
-
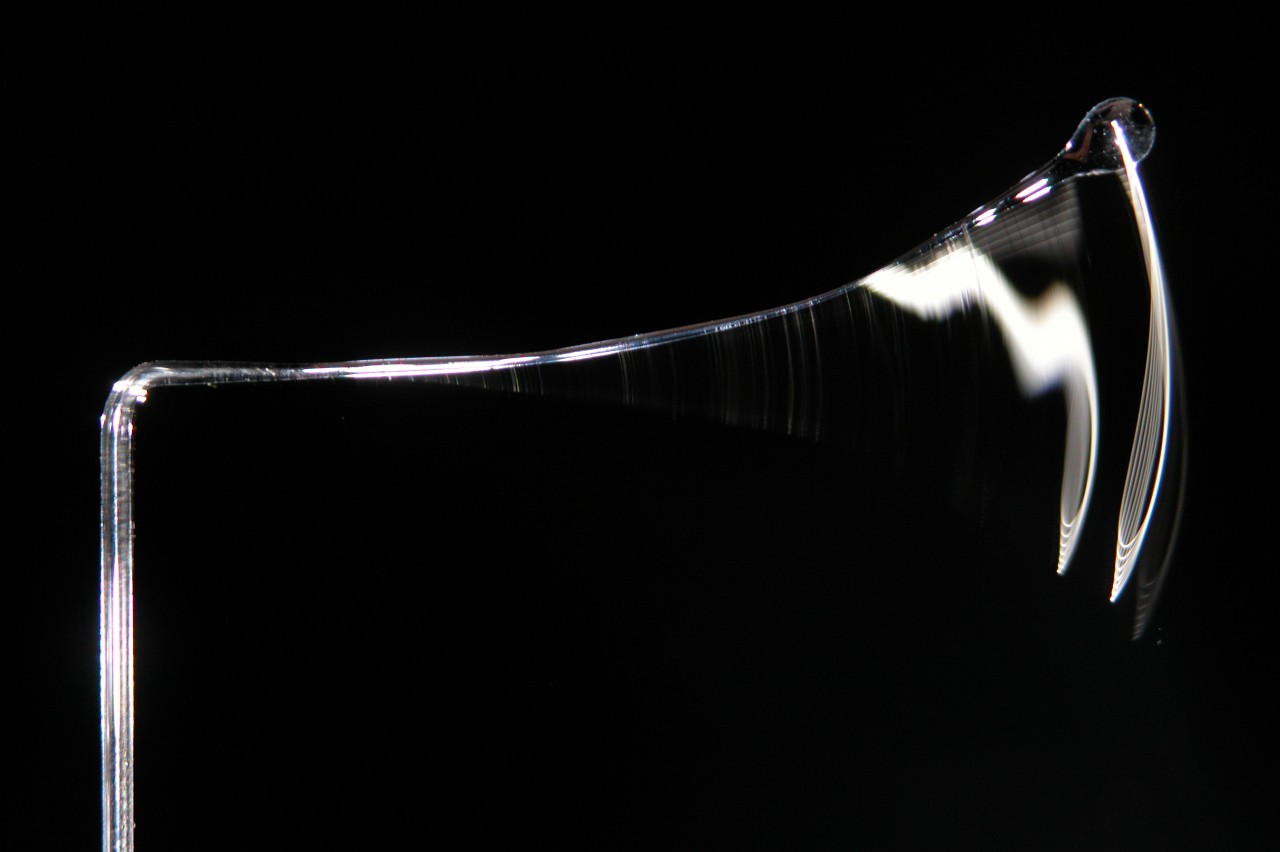
 Una varilla elástica vibrando, es un ejemplo de sistema donde la energía potencial elástica se transforma en energía cinética y viceversa.
Una varilla elástica vibrando, es un ejemplo de sistema donde la energía potencial elástica se transforma en energía cinética y viceversa.
En física e ingeniería, el término elasticidad designa la propiedad mecánica de ciertos materiales de sufrir deformaciones reversibles cuando se encuentran sujetos a la acción de fuerzas exteriores y de recuperar la forma original si estas fuerzas exteriores se eliminan.
Contenido
Introducción
La elasticidad es estudiada por la teoría de la elasticidad, que a su vez es parte de la mecánica de sólidos deformables. La teoría de la elasticidad (TE) como la mecánica de sólidos (MS) deformables describe cómo un sólido (o fluido totalmente confinado) se mueve y deforma como respuesta a fuerzas exteriores. La diferencia entre la TE y la MS es que la primera sólo trata sólidos en que las deformaciones son termodinámicamente reversibles y en los que el estado tensiones
 en un punto
en un punto  en un instante dado dependen sólo de las deformaciones
en un instante dado dependen sólo de las deformaciones  en el mismo punto y no de las deformaciones anteriores (ni el valor de otras magnitudes en un instante anterior). Para un sólido elástico la ecuación constitutiva funcionalmente es de la forma:
en el mismo punto y no de las deformaciones anteriores (ni el valor de otras magnitudes en un instante anterior). Para un sólido elástico la ecuación constitutiva funcionalmente es de la forma:
donde
 denota el conjunto de tensores simétricos de segundo orden del espacio euclídeo. Si el sólido es homogéneo el valor de la función anterior no penderá del segundo argumento.
denota el conjunto de tensores simétricos de segundo orden del espacio euclídeo. Si el sólido es homogéneo el valor de la función anterior no penderá del segundo argumento.La propiedad elástica de los materiales está relacionada, como se ha mencionado, con la capacidad de un sólido de sufrir transformaciones termodinámicas reversibles e independencia de la velocidad de deformación (los sólidos viscoelásticos y los fluidos, por ejemplo, presentan tensiones dependientes de la velocidad de deformación). Cuando sobre un sólido deformable actúan fuerzas exteriores y éste se deforma se produce un trabajo de estas fuerzas que se almacena en el cuerpo en forma de energía potencial elástica y por tanto se producirá un aumento de la energía interna. El sólido se comportará elásticamente si este incremento de energía puede realizarse de forma reversible, en este caso decimos que el sólido es elástico.
Elasticidad lineal
Un caso particular de sólido elástico se presenta cuando las tensiones y las deformaciones están relacionadas linealmente, mediante la siguiente ecuación constitutiva:

Cuando eso sucede decimos que tenemos un sólido elástico lineal. La teoría de la elasticidad lineal es el estudio de sólidos elásticos lineales sometidos a pequeñas deformaciones de tal manera que además los desplazamientos y deformaciones sean "lineales", es decir, que las componentes del campo de desplazamientos u sean muy aproximadamente una combinación lineal de las componentes del tensor deformación del sólido. En general un sólido elástico lineal sometido a grandes desplazamientos no cumplirá esta condición. Por tanto la teoría de la elasticidad lineal sólo es aplicable a:
- Sólidos elásticos lineales, en los que tensiones y deformaciones estén relacionadas linealmente (linealidad material).
- Deformaciones pequeñas, es el caso en que deformaciones y desplazamientos están relacionados linealmente. En este caso puede usarse el tensor deformación lineal de Green-Lagrange para representar el estado de deformación de un sólido (linealidad geométrica).
Debido a los pequeños desplazamientos y deformaciones a los que son sometidos los cuerpos, se usan las siguientes simplificaciones y aproximaciones para sistemas estables:
- Las tensiones se relacionan con las superficies no deformadas
- Las condiciones de equilibrio se presentan para el sistema no deformado
Para determinar la estabilidad de un sistema hay presentar las condiciones de equilibrio para el sistema deformado.
Tensión
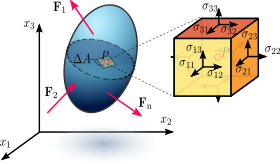 Componentes del tensor tensión en un punto P de un sólido deformable.
Componentes del tensor tensión en un punto P de un sólido deformable.La tensión en un punto se define como el límite de la fuerza aplicada sobre una pequeña región sobre un plano π que contenga al punto dividida del área de la región, es decir, la tensión es la fuerza aplicada por unidad de superficie y depende del punto elegido, del estado tensional de sólido y de la orientación del plano escogido para calcular el límite. Puede probarse que la normal al plano escogido nπ y la tensión tπ en un punto están relacionadas por:

Donde T es el llamado tensor tensión, también llamado tensor de tensiones, que fijada una base vectorial ortogonal viene representado por una matriz simétrica 3x3:

Donde la primera matriz es la forma común de escribir el tensor tensión en física y la segunda forma usa las convenciones comunes en ingeniería. Dada una región en forma de ortoedro con caras paralelas a los ejes coordenados situado en el interior un sólido elástico tensionado las componentes σxx, σyy y σzz dan cuenta de cambios de longitud en las tres direcciones, pero que no distorsinan los ángulos del ortoedro, mientras que las componentes σxy, σyz y σzx están relacionadas con la distorsión angular que convertiría el ortoedro en un paralelepípedo.
Deformación
En teoría lineal de la elasticidad dada la pequeñez de las deformaciones es una condición necesaria para poder asegurar que existe una relación lineal entre los desplazamientos y la deformación. Bajo esas condiciones la deformación puede representarse adecuadamente mediante el tensor deformación infinitesimal que viene dada por:
Los componentes de la diagonal principal contienen los alargamientos (dilataciones), mientras que el resto de los componentes del tensor son los medios desplazamientos. Las componentes están linealmente relacionadas con los desplazmientos mediante esta relación:
Ecuaciones constitutivas de Lamé-Hooke
Las ecuaciones de Lamé-Hooke son las ecuaciones constitutivas de un sólido elástico lineal, homogéneo e isótropo, tienen la forma:
En el caso de un problema unidimensional, σ = σ11, ε = ε11, C11 = E y la ecuación anterior se reduce a:
Donde E es el módulo de elasticidad longitudinal o módulo de Young y G el módulo de elasticidad transversal. Para caracterizar el comportamiento de un sólido elástico lineal e isótropo se requieren además del módulo de Young otra constante elástica, llamada coeficiente de Poisson (ν) y el coeficiente de temperatura (α). Por otro lado, las ecuaciones de Lamé para un sólido elástico lineal e isótropo pueden ser deducidas del teorema de Rivlin-Ericksen, que pueden escribirse en la forma:
Ciertos materiales muestran un comportamiento sólo aproximadamente elástico, mostrando por ejemplo variación de la deformación con el tiempo o fluencia lenta. Estas deformaciones pueden ser permanentes o tras descargar el cuerpo pueden desaparecer (parcial o completamente) con el tiempo (viscoplasticidad, viscoelasticidad). Además algunos materiales pueden presentar plasticidad es decir pueden llegar a exhibir pequeñas deformaciones permanentes, por lo que las ecuaciones anteriores en muchos casos tampoco constituyen una buena aproximación al comportamiento de estos materiales.
Ecuaciones de equilibrio
Equilibrio interno
Cuando las deformaciones no varían con el tiempo, el campo de tensiones dado por el tensor tensión representa un estado de equilibrio con las fuerzas de volumen b = (bx,by,bz) en todo punto del sólido, lo cual implica que el campo de tensiones satisface estas condiciones de equilibrio:
Equilibrio en el contorno
Además de las últimas ecuaciones deben cumplirse las condiciones de contorno, sobre la superficie del sólido, que relacionan el vector normal a la misma n = (nx,ny,nz) (dirigido hacia el exterior) con las fuerzas por unidad de superficie que actúan en el mismo punto de la superficie f = (fx,fy,fz):
Problema elástico
Un problema elástico lineal queda definido por la geometría del sólido, las propiedades de dicho material, unas fuerzas actuantes y unas condiciones de contorno que imponen restricciones al movimiento de cuerpo. A partir de esos elementos es posible encontrar un campo de tensiones internas sobre el sólido (que permitirá identificar los puntos que soportan más tensión) y un campo de desplazamientos (que permitirá encontrar si la rigidez del elemento resistente es la adecuada para su uso).
Para platear el problema elástico son necesarias las nociones que han sido descritas en las secciones anteriores, que describen las tensiones, las deformaciones y los desplazamientos de un cuerpo. Todas estas magnitudes vienen descritas por 15 funciones matemáticas:
- Las seis componentes del tensor de tensiones
 y
y  .
. - Las tres componentes del vector de desplazamientos:
 .
. - Las seis componentes del tensor de deformaciones:
 y
y  .
.
Para comprobar si se cumplen estas relaciones, formadas por 15 funciones, el siguiente paso es comprobar si las relaciones descritas hasta ahora bastan para describir completamente el estado de un cuerpo. Una condición necesaria para ello es que el número de ecuaciones disponibles coincida con el número de incógnitas. Las ecuaciones diponibles son:
- Las tres ecuaciones de equilibrio de Cauchy.
- Las seis ecuaciones de compatibilidad de Saint-Venant, que aseguran que se los desplazamientos y deformaciones están adecaudamente relacionados.
- Las seis ecuaciones constitutivas, para un material elástico lineal isótropo y homogéneo estas ecuaciones vienen dadas por las ecuaciones de Lamé-Hooke.
Estas 15 ecuaciones igualan exactamente el número de incógnitas. Un método común es sustituir las relaciones entre desplazamientos y deformaciones en las ecuaciones constitutivas, lo cual hace que se cumplan las ecuaciones de compatibilidad trivialmente. A su vez el resultado de esta sustitución se puede introducir en las ecuaciones de equilibrio de Cauchy lo cual convierte el anterior sistema en un sistema de tres ecuaciones en derivadas paraciales y tres desplazamientos como incógnita.
De esta manera se llega a un sistema de 15 ecuaciones con 15 incognitas. La formulación más simple para resolver el problema elástico es la llamada formulación de Navier, esta formulación reduce el sistema a un sistema de tres ecuaciones diferenciales para los desplazamientos. Esto se logra insertando en las ecuaciones de equilibrio las ecuaciones propias del material, las ecuaciones de los desplazamientos y las ecuaciones de las deformaciones podemos expresar nuestro sistema de ecuaciones en un sistema de tres ecuaciones diferenciales parciales. Si lo reducimos hacia las componentes del vector de desplazamientos llegamos a las ecuaciones de Navier:
Que con el operador Nabla y el operador de Laplace se dejan escribir como:
![G\left[\Delta\mathbf{u} + \frac{1}{1-2\nu} \nabla (\nabla\cdot\mathbf{u})\right] + \mathbf{b} = 0](5/015774642bb6a7a485ebe2ceb5707219.png)
Mediante consideraciones energéticas se puede demostrar que estas ecuaciones presentan una única solución.
Elasticidad y Diseño mecánico
En ingeniería mecánica es frecuente plantear problemas elásticos para decidir la adecuación de un diseño. En ciertas situaciones de interés práctico no es necesario resolver el problema elástico completo sino que basta con plantear un modelo simplificado y aplicar los métodos de la resistencia de materiales para calcular aproximadamente tensiones y desplazamientos. Cuando la geometría involucrada en el diseño mecánico es compleja la resistencia de materiales suele ser insuficiente y la resolución exacta del problema elástico inabordable desde el punto de vista práctico. En esos casos se usan habitualmente métodos numéricos como el Método de los elementos finitos para resolver el problema elástico de manera aproximada.
Un buen diseño normalmente incorpora unos requisitos de:
- resistencia adecuada,
- rigidez adecuada,
- estabilidad global y elástica.
Elasticidad no lineal
En principio, el abandono del supuesto de pequeñas deformaciones obliga a usar un tensor deformación no lineal y no infinitesimal, como en la teoría lineal de la elasticidad donde se usaba el tensor deformación lineal infinitesimal de Green-Lagrange. Eso complica mucho las ecuaciones de compatibilidad. Además matemáticamente el problema se complica, porque las ecuaciones resultantes de la anulación de ese supuesto incluyen fenómenos de no linealidad geométrica (pandeo, abolladura, snap-through,...).
Si además de eso el sólido bajo estudio no es un sólido elástico lineal nos vemos obligados a substituir la ecuaciones de Lamé-Hooke por otro tipo de ecuaciones constitutivas capaces de dar cuenta de la no linealidad material. Además de las mencionadas existen otras no linealidades en una teoría de la elasticidad para grandes deformaciones. Resumiendo las fuentes de no linealidad serían:[1]
- El tensor deformación no se relaciona linealmente con el desplazamiento
 , concretamente es una aplicación cuadrática del gradiente de deformación:
, concretamente es una aplicación cuadrática del gradiente de deformación:  .
. - Para muchos materiales la ecuación constitutiva es no lineal.
- Las ecuaciones de equilibrio sobre el dominio ocupado por el sólido, escrito en términos del segundo tensor de Piola-Kirchhoff son nolineales:
 y
y  . Donde
. Donde  es el difeomorfismo que da la relación entre los puntos antes y después de la deformación.
es el difeomorfismo que da la relación entre los puntos antes y después de la deformación. - En algunos casos, como las cargas muertas las fuerzas que aparecen en los segundos miembros de las ecuaciones experesados en el dominio de referencia incluyen no linealidades, por ejemplo cuando en la configuración deformada aparece una presión normal a la superficie, eso comporta que
![\mathbf{f}_{S,R} = -p\det(\boldsymbol\nabla\phi)[\boldsymbol\nabla\phi^{-T}]\mathbf{n}](6/f96f54a64095b928a8db96bc7b64181d.png)
- Las condiciones de incomprensibilidad, de positividad del jacobiano de la deformación, o de la inyectividad en el caso de contactos que evian la autopenetración del sólido deformado también imponen ecuaciones adicionales que se expresan en forma de ecuaciones no lineales.
Deformación
Una deformación elástica finita implica un cambio de forma de un cuerpo, debido a la condición de reversibilidad ese cambio de forma viene representado por un difeomorfismo. Formalmente si
 representa la forma del cuerpo antes de deformarse y
representa la forma del cuerpo antes de deformarse y  la forma del cuerpo después de deformarse, la deformación viene dada por un difeomordismo:
la forma del cuerpo después de deformarse, la deformación viene dada por un difeomordismo:
El tensor deformación puede definirse a partir del gradiente de deformación
 que no es otra cosa que la matriz jacobiana de la transformación anterior:
que no es otra cosa que la matriz jacobiana de la transformación anterior:
Existen diversas representaciones alternativas según se escojan las coordenadas materiales iniciales sobre el cuerpo sin deformar (X, Y, Z) o las coordenadas sobre el cuerpo deformado (x, y, z):

El primero de los dos tensores deformación recibe el nombre de tensor de deformación de Green-Lagrange, mientras que el segundo de ellos es el tensor deformación de Almansi. Además de estos tensores en las ecuaciones constitutivas, por simplicidad de cálculo, se usan los tensores de Cauchy-Green derecho e izquierdo:

Ecuaciones constitutivas
Existen muchos modelos de materiales elásticos no lineales diferentes. Entre ellos destaca la familia de materiales hiperelásticos, en los que la ecuación constitutiva puede derivarse de un potencial elástico W que representa la energía potencial elástica. Este potencial elástico comúnmente es una función de los invariantes algebraicos del tensor deformación de Cauchy-Green:
![W=W(I_1,I_2,I_3); \qquad I_1 = \mbox{tr}(\mathbf{I}+2\mathbf{D}_m) = 3+2\mbox{tr}(\mathbf{D}_m),
\quad I_2 = \frac{1}{2}[\mbox{tr}(\mathbf{I}+2\mathbf{D}_m)]^2 - [\mbox{tr}(\mathbf{I}+2\mathbf{D}_m)^2)],
\quad I_3 = \det(\mathbf{I}+2\mathbf{D}_m)](5/9f55445e9cb4c737d04d4c597f4c184b.png)
En este tipo de materiales el tensor tensión de Cauchy viene dado en función del potencial elástico y el tensor espacial de Almansi mediante la expresión:[2]

Donde:

Un material elástico lineal es un caso particular de lo anterior donde:
(#)

Aproximación hasta segundo orden
Si se desarrolla () hasta primer orden se obtiene la ecuación constitutiva de la elasticidad lineal para un sólido isótropo, que depende sólo de dos constantes elásticas:

Donde en esa expresión al igual que en las siguientes se aplicará el convenio de sumación de Einstein para subíndices repetidos. Un material cuya ecuación constitutiva tiene la forma lineal anterior se conoce como material de Saint Venant-Kirchhoff. Si se desarrolla la expresión () hasta segundo orden entonces aparecen cuatro constantes elásticas más:

Un material cuya ecuación constitutiva viene dada por la ecuación anterior se conoce como material de Murnaghan.[3] En componentes se tiene:

O equivalentemente:
σij = λεV(1 + ν1εC + ν2εV)δij + 2μ(1 + ν3εV)εij + ν4εikεkj
Donde:
- εV = εxx + εyy + εzz es la deformación volumétrica.

El modelo de Murnaghan anterior representa la generalización más obvia de un material de Saint Venant-Kirchhoff, aunque en la práctica es de interés limitado la expresión anterior, ya que Novozhilov[4] mediante argumentos termodinámicos sugiere que la respuesta de un material sólo debe contener potencias impares del tensor deformación.
Véase también
- Cinemática
- Choque elástico
- Choque inelástico
- Energía cinética
- Mecánica de medios continuos
- Mecánica de sólidos deformables
- problema elástico
- Stephen Timoshenko: Considerado el padre de la Ingeniería Mecánica moderna.
Referencia
- ↑ Philippe C. Ciarlet, Mathematical Elasticity, Vol. 1, pp. 250-251.
- ↑ J. R. Atkin & N. Fox, 1980, p. 65-67.
- ↑ Murnaghan, F. D. (1937): "Finite deformations of an elastic solid", en American Journal of Mathematics, 59, pp. 235-260.
- ↑ V. V. Novozhilov (1953): Foundations of Non-linear Theory of Elasticity, Graylock Press, Rochester
Bibliografía
- Ciarlet, Philippe G. (en inglés). Mathematical Elasticity: Volume I: Three Dimensional Elasticity. North-Holland. ISBN 0-444-81776-X.
- Atkin, Raymond John; Fox, Norman (en inglés). An introduction to the Theory of Elasticity. North-Holland. ISBN 0-486-44241-1.
Enlaces externos
Categorías:- Mecánica de medios continuos
- Resistencia de materiales
- Ingeniería estructural
- Materiales en ingeniería













![G\left[ \frac{\part^2 u_{x}}{\part x^2} + \frac{\part^2 u_{x}}{\part y^2} + \frac{\part^2 u_{x}}{\part z^2} +
\frac{1}{1-2 \nu} \frac{\partial}{\partial x} \left( \frac{\partial u_{x}}{\partial x} + \frac{\partial u_{y}}{\partial y} + \frac{\partial u_{z}}{\partial z} \right)\right] + b_{x} = 0](8/908e5ae766cdf3a762be671020862ddc.png)
![G\left[ \frac{\part^2 u_{y}}{\part x^2} + \frac{\part^2 u_{y}}{\part y^2} + \frac{\part^2 u_{y}}{\part z^2} +
\frac{1}{1-2 \nu} \frac{\partial}{\partial y} \left( \frac{\partial u_{x}}{\partial x} + \frac{\partial u_{y}}{\partial y} + \frac{\partial u_{z}}{\partial z} \right) \right] + b_{y} = 0](7/1876f09942789fcc83c7ee9299c393c6.png)
![G\left[ \frac{\part^2 u_{z}}{\part x^2} + \frac{\part^2 u_{z}}{\part y^2} + \frac{\part^2 u_{z}}{\part z^2} +
\frac{1}{1-2 \nu} \frac{\partial}{\partial z} \left( \frac{\partial u_{x}}{\partial x} + \frac{\partial u_{y}}{\partial y} + \frac{\partial u_{z}}{\partial z} \right) \right] + b_{z} = 0](2/63235db6bddd6ee67472fc7b51a3bd99.png)
Wikimedia foundation. 2010.