- Resistencia de materiales
-
Resistencia de materiales
La resistencia de materiales clásica es una disciplina de la ingeniería mecánica y la ingeniería estructural que estudia los sólidos deformables mediante modelos simplificados. La resistencia de un elemento se define como su capacidad para resistir esfuerzos y fuerzas aplicadas sin romperse, adquirir deformaciones permanentes o deteriorarse de algún modo.
Un modelo de resistencia de materiales establece una relación entre las fuerzas aplicadas, también llamadas cargas o acciones, y los esfuerzos y desplazamientos inducidos por ellas. Típicamente las simplificaciones geométricas y las restricciones impuestas sobre el modo de aplicación de las cargas hacen que el campo de deformaciones y tensiones sean sencillos de calcular.
Para el diseño mecánico de elementos con geometrías complicadas la resistencia de materiales suele ser insuficiente y es necesario usar técnicas basadas en la teoría de la elasticidad o la mecánica de sólidos deformables más generales. Esos problemas planteados en términos de tensiones y deformaciones pueden entonces ser resueltos de forma muy aproximada con métodos numéricos como el análisis por elementos finitos.
Contenido
Enfoque de la resistencia de materiales
La teoría de sólidos deformables requiere generalmente trabajar con tensiones y deformaciones. Estas magnitudes vienen dadas por campos tensoriales definidos sobre dominios tridimensionales que satisfacen complicadas ecuaciones diferenciales. Sin embargo, para ciertas geometrías aproximadamente unidimensionales (vigas, pilares, celosías, arcos, etc.) o bidimensionales (placas y láminas, membranas, etc.) el estudio puede simplificarse y se pueden analizar mediante el cálculo de esfuerzos internos definidos sobre una línea o una superficie en lugar de tensiones definidas sobre un dominio tridimensional. Además las deformaciones pueden determinarse con los esfuerzos internos a través de cierta hipótesis cinemática. En resumen, para esas geometrías todo el estudio puede reducirse al estudio de magnitudes alternativas a deformaciones y tensiones. El esquema teórico de un análisis de resistencia de materiales comprende:
- Hipótesis cinemática establece como serán las deformaciones o el campo de desplazamientos para un determinado tipo de elementos bajo cierto tipo de solicitudes. Para piezas prismáticas las hipótesis más comunes son la hipótesis de Bernouilli-Navier para la flexión y la hipótesis de Saint-Venant para la torsión.
- Ecuación constitutiva que establece una relación entre las deformaciones o desplazamientos deducibles de la hipótesis cinemática y las tensiones asociadas. Estas ecuaciones son casos particulares de las ecuaciones de Lamé-Hooke.
- Ecuaciones de equivalencia, son ecuaciones en forma de integral que relacionan las tensiones con los esfuerzos internos.
- Ecuaciones de equilibrio que relacionan los esfuerzos internos con las fuerzas exteriores.
En las aplicaciones prácticas el análisis es sencillo, se construye un esquema ideal de cálculo formado por elementos unidimensionales o bidimensionales, y se aplican fórmulas preestablecidas en base al tipo de solicitación que presentan los elementos. Esas fórmulas preestablecidas que no necesitan ser deducidas para cada caso, se basan en el esquema de cuatro puntos anterior. Más concretamente la resolución práctica de un problema de resistencia de materiales sigue los siguientes pasos:
- Cálculo de esfuerzos, se plantean las ecuaciones de equilibrio y ecuaciones de compatibilidad que sean necesarias para encontrar los esfuerzos internos en función de las fuerzas aplicadas.
- Análisis resistente, se calculan las tensiones a partir de los esfuerzos internos. La relación entre tensiones y deformaciones depende del tipo de solicitación y de la hipótesis cinemática asociada: flexión de Bernouilli, flexión de Timoshenko, flexión esviada, tracción, pandeo, torsión de Coulomb, teoría de Collignon para tensiones cortantes, etc.
- Análisis de rigidez, se calculan los desplazamientos máximos a partir de las fuerzas aplicadas o los esfuerzos internos. Para ello puede recurrirse directamente a la forma de la hipótesis cinemática o bien a la ecuación de la curva elástica, las fórmulas vectoriales de Navier-Bresse o los teoremas de Castigliano.
Hipótesis cinemática
La hipótesis cinemática es una especificación matemática de los desplazamientos de un sólido deformable que permite calcular las deformaciones en función de un conjunto de parámetros incógnita. El concepto se usa especialmente en el cálculo de elementos lineales (e.g. vigas) y elementos bidimensionales, donde gracias a la hipótesis cinemática se pueden obtener relaciones funcionales más simples. Así pués, gracias a la hipótesis cinemática se pueden relacionar los desplazamientos en cualquier punto del sólido deformable de un dominio tridimensional con los desplazamientos especificados sobre un conjunto unidimensional o bidimensional.
Hipótesis cinemática en elementos lineales
La resistencia de materiales propone para elementos lineales o prismas mecánicos, como las vigas y pilares, en las que el desplazamiento de cualquier punto se puede calcular a partir de desplazamientos y giros especificados sobre el eje baricéntrico. Eso significa que por ejemplo para calcular una viga en lugar de espeficar los desplazamientos de cualquier punto en función de tres coordenadas, podemos expresarlos como función de una sola coordenada sobre el eje baricéntrico, lo cual conduce a sistemas de ecuaciones diferenciales relativamente simples. Existen diversos tipos de hipótesis cinemáticas según el tipo de solicitación de la viga o elemento unidimensional:
- Hipótesis de Navier-Bernouilli, que se usa para elementos lineales alargados sometidos a flexión cuando las deformaciones por cortante resultan pequeñas.
- Hipótesis de Timoshenko, que se usa para los elementos lineales sometidos a flexión en un caso totalmente general ya que no se desprecia la deformación por cortante.
- Hipótesis de Saint-Venant para la extensión, usada en piezas con esfuerzo normal para zonas de la viga alejadas de la zona de aplicación de las cargas.
- Hipótesis de Saint-Venant para la torsión, se usa para piezas prismáticas sometidas a torsión y en piezas con rigidez torsional grande.
- Hipótesis de Coulomb, se usa para piezas prismáticas sometidas a torsión y en piezas con rigidez torsional grande y sección circular o tubular. Esta hipótesis constituye una especialización del caso anterior.
Hipótesis cinemática en elementos superficiales
Para placas y láminas sometidas a flexión se usan dos hipótesis, que se pueden poner en correspondencia con las hipótesis de vigas
- Hipótesis de Love-Kirchhoff
- Hipótesis de Reissner-Mindlin
Ecuación constitutiva
Las ecuaciones constitutivas de la resistencia de materiales son las que explicitan el comportamiento del material, generalmente se toman como ecuaciones constitutivas las ecuaciones de Lamé-Hooke de la elasticidad lineal. Estas ecuaciones pueden ser especializadas para elementos lineales y superficiales. Para elementos lineales en el cálculo de las secciones, las tensiones sobre cualquier punto (y,z) de la sección puedan escribirse en función de las deformaciones como:
En cambio para elementos superficiales sometidos predominantemente a flexión como las placas la especialización de las ecuaciones de Hooke es: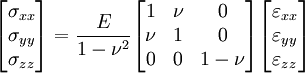
Además de ecuaciones constitutivas elásticas, en el cálculo estructural varias normativas recogen métodos de cálculo plástico donde se usan ecuaciones constitutivas de plasticidad.
Ecuaciones de equivalencia
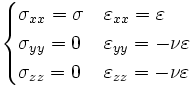
Las ecuaciones de equivalencia expresan los esfuerzos resultantes a partir de la distribución de tensiones. Gracias a ese cambio es posible escribir ecuaciones de equilibrio que relacionen directamente las fuerzas aplicadas con los esfuerzos internos.
Elementos lineales
En elementos lineales rectos las coordenadas cartesianas para representar la geometría y expresar tensiones y esfuerzos, se escogen normalmente con el eje X paralelo al eje baricéntrico de la pieza, y los ejes Y y Z coincidiendo con las direcciones principales de inercia. En ese sistema de coordenadas la relación entre esfuerzo normal (Nx), esfuerzos cortantes (Vy, Vz), el momento torsor (Mx) y los momentos flectores (My, Mz) es:
Donde las tensiones que aparecen son las componentes del tensor tensión para una pieza prismática:
Elementos bidimensionales
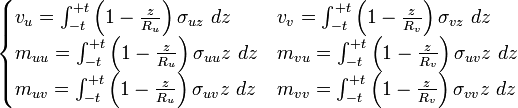
Para elementos bidimensionales es común tomar un sistema de dos coordenadas (cartesiano o curvilíneo) coincidentes con la superficie media, estando la tercera coordenada alineada con el espesor. Para una placa plana de espesor 2t y con un sistema de coordenadas en el que el plano XY coincide con su plano medio. Los esfuerzos se componen de 4 esfuerzos de membrana
 (o esfuerzos axiles por unidad de área), 4 momentos flectores y 2 esfuerzos cortantes. Los esfuerzos de membrana usando un conjunto de coordenadas ortogonales
(o esfuerzos axiles por unidad de área), 4 momentos flectores y 2 esfuerzos cortantes. Los esfuerzos de membrana usando un conjunto de coordenadas ortogonales  sobre una lámina de Reissner-Mindlin:
sobre una lámina de Reissner-Mindlin:
Donde Ru,Rv son los radios de curvatura en cada una de las direcciones coordenadas y z es la altura sobre la superficie media de la lámina. Los esfuerzos cortantes y los momentos flectores por unidad de área vienen dados por:
El tensor tensión de una lámina general para la que valen las hipótesis de Reissner-Mindlin es:
![[T]_{uvz} = \begin{bmatrix}
\sigma_{uu} & \sigma_{uv} & \sigma_{uz} \\
\sigma_{uv} & \sigma_{vv} & \sigma_{vz} \\
\sigma_{uz} & \sigma_{vz} & 0
\end{bmatrix}](/pictures/eswiki/48/017498aafb86c521c0f56ebd8d536522.png)
Un caso particular de lo anterior lo constituyen las láminas planas cuya deformación se ajusta a la hipótesis de Love-Kirchhoff, caracterizada por que el vector normal a la superficie media deformada coincide con la normal deformada. Esa hipótesis es una muy buena aproximación cuando los esfuerzos cortantes son despreciables y en ese caso los momentos flectores por unidad de área en función de las tensiones vienen dados por:

Donde las tensiones que aparecen son las componentes del tensor tensión para una lámina de Love-Kirchhoff:
![[T]_{xyz} = \begin{bmatrix}
\sigma_{xx} & \sigma_{xy} & 0 \\
\sigma_{xy} & \sigma_{yy} & 0 \\
0 & 0 & 0
\end{bmatrix}](/pictures/eswiki/55/7c3c25fb2b09094eaa1f96b77e0eaf08.png)
Ecuaciones de equilibrio
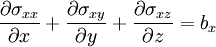
Las ecuaciones de equilibrio de la resistencia de materiales relacionan los esfuerzos internos con las fuerzas exteriores aplicadas. Las ecuaciones de equilibrio para elementos lineales y elementos bidimensionales son el resultado de escribir las ecuaciones de equilibrio elástico en términos de los esfuerzos en lugar de las tensiones. Las ecuaciones de equilibrio para el campo de tensiones generales de la teoría de la elasticidad lineal:
Si en ellas tratamos de substituir las tensiones por los esfuerzos internos llegamos a las ecuaciones de equilibrio de la resistencia de materiales. El procedimiento, que se detalla a continuación, es ligeramente diferente para elementos unidimensionales y bidimensionales.Ecuaciones de equilibrio en elementos lineales rectos
En una viga recta horizontal, alineada con el eje X, y en la que las cargas son verticales y situadas sobre el plano XY, las ecuaciones de equilibrio relacionan el momento flector (Mz), el esfuerzo cortante (Vy) con la carga vertical (qy) y tienen la forma:
Ecuaciones de equilibrio en elementos planos bidimensionales
Las ecuaciones de equilibrio para elementos bidimensionales (placas) en flexión análogas a las ecuaciones de la sección anterior para elementos lineales (vigas) relacionan los momentos por unidad de ancho (mx, my, mxy), con los esfuerzos cortantes por unidad de ancho (vx, my) y la carga superficial vertical (qs):
Relación entre esfuerzos y tensiones
El diseño mecánico de piezas requiere:
- Conocimiento de las tensiones, para verificar si éstas sobrepasan los límites resistentes del material.
- Conocimiento de los desplazamientos, para verificar si éstos sobrepasan los límite de rigidez que garanticen la funcionalidad del elemento diseñado.
En general el cálculo de tensiones puede abordarse con toda generalidad desde la teoría de la elasticidad, sin embargo cuando la geometría de los elementos es suficientemente simple (como sucede en el caso de elementos lineales o bidimensionales) las tensiones y desplazamientos pueden ser calculados de manera mucho más simple mediante los métodos de la resistencia de materiales, que directamente a partir del planteamiento general del problema elástico.
Elementos lineales o unidimensionales
El cálculo de tensiones se puede obtener a partir de la combinación de las fórmula de Navier para la flexión, la fórmula de Collignon-Jourawski y las fórmulas del cálculo de tensiones para la torsión.
El cálculo de desplazamientos en elementos lineales puede llevarse a cabo a partir métodos directos como la ecuación de la curva elástica, los teoremas de Mohr o el método matricial o a partir de métodos energéticos como los métodos energéticos como los teoremas de Castigliano o incluso por métodos computacionales.
Elementos superficiales o bidimensionales
La teoría de placas de Love-Kirchhoff es el análogo bidimensional de la teoría de vigas de Euler-Bernouilli. Por otra parte el cálculo de láminas es el análogo bidimensional del cálculo de arcos. El análogo bidimensional para una placa de la ecuación de la curva elástica, es la ecuación de Lagrange para la deflexión del plano medio de la placa. Para el cálculo de placas también es frecuente el uso de métodos variacionales.
Relación entre esfuerzos y desplazamientos
Otro problema importante en muchas aplicaciones de la resistencia de materiales es el estudio de la rigidez. Más concretamente ciertas aplicaciones requieren asegurar que bajo las fuerzas actuantes algunos elementos resistentes no superen nunca desplazamientos por encima de cierto valor prefijado. El cálculo de las deformaciones a partir de los esfuerzos puede determiarse mediante varios métodos semidirectos como el uso del teorema de Castigliano, las fórmulas vectoriales de Navier-Bresse o el uso de la ecuación de la curva elástica.
Referencia
Bibliografía
- Timoshenko S., Strength of Materials, 3rd edition, Krieger Publishing Company, 1976, ISBN 0-88275-420-3
- Den Hartog, Jacob P., Strength of Materials, Dover Publications, Inc., 1961, ISBN 0-486-60755-0
- Popov, Egor P., Engineering Mechanics of Solids, Prentice Hall, Englewood Cliffs, N. J., 1990, ISBN 0-13-279258-3
- Monleón Cremades, Salvador, Análisis de vigas, arcos, placas y láminas, Universidad Politécnica de Valencia, 1999, ISBN 84-7721-769-6
Enlaces externos
Véase también
- Conceptos de resistencia de materiales: rigidez, equilibrio mecánico, flexión, torsión.
- Mecánica de sólidos deformables: tensión, deformación, elasticidad.
- Elementos resistentes lineales: vigas, pilares, celosías, arcos.
- Elementos resistentes superficiales: placas y láminas, membranas.
- Métodos de cálculo: cálculo de esfuerzos, teoremas de Castigliano, ecuaciones de Navier-Bresse, teoremas de Mohr, método matricial de la rigidez.
- Stephen Timoshenko: Considerado el padre de la Ingeniería Mecánica moderna.
Categorías: Ingeniería mecánica | Ingeniería estructural | Resistencia de materiales


![[T]_{xyz} = \begin{bmatrix}
\sigma_x & \tau_{xy} & \tau_{xz} \\
\tau_{xy} & 0 & 0 \\
\tau_{xz} & 0 & 0
\end{bmatrix}](/pictures/eswiki/50/2a626a40de24e5fa5ed363ea3b68f990.png)


Wikimedia foundation. 2010.