- Mars Reconnaissance Orbiter
-
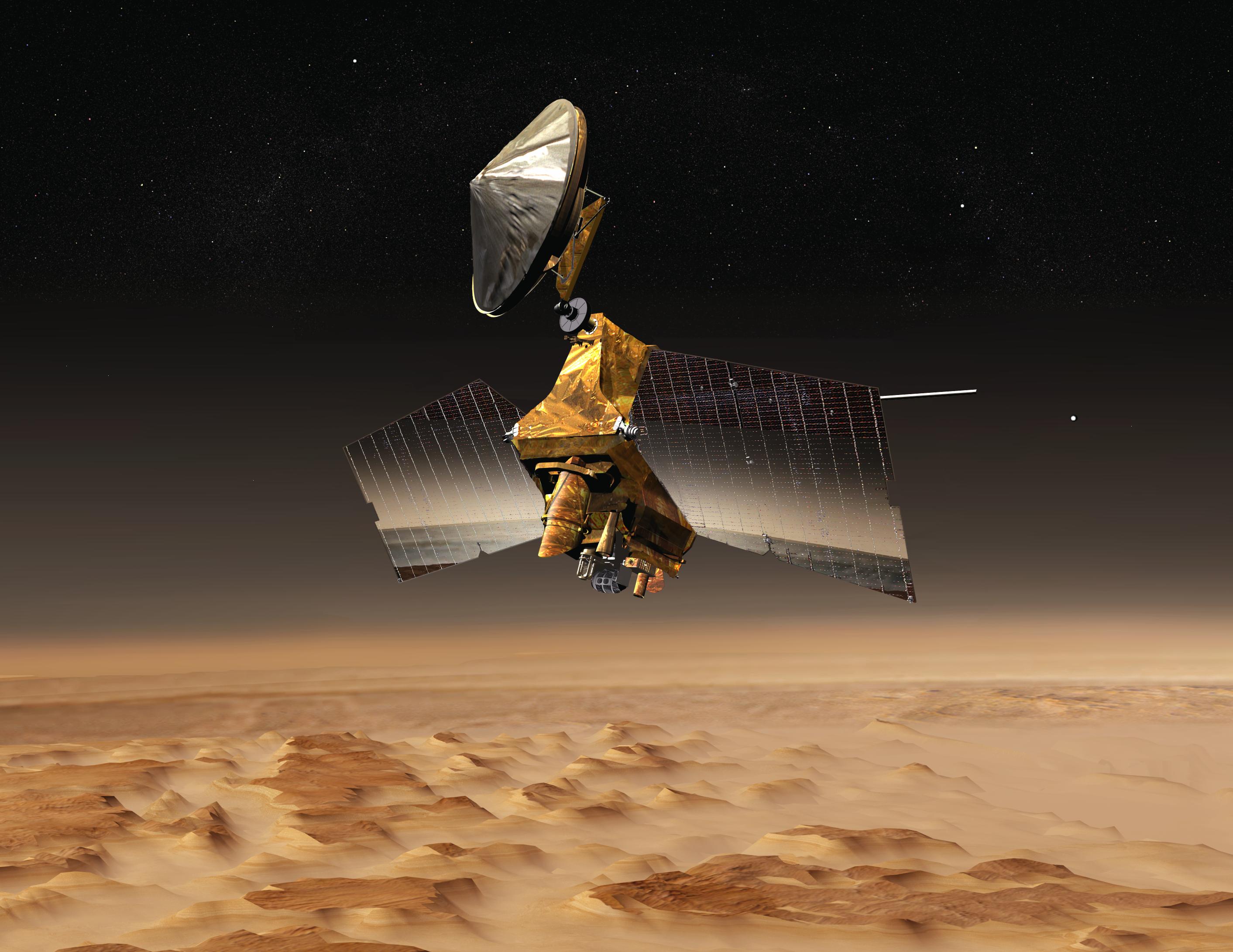
 Mars Reconnaissance Orbiter sobre Marte (representación artística).
Mars Reconnaissance Orbiter sobre Marte (representación artística).
 Lanzamiento del cohete Atlas V que despegó con la Mars Reconnaissance Orbiter, 7:43:00 a.m EDT 12 de agosto de 2005.
Lanzamiento del cohete Atlas V que despegó con la Mars Reconnaissance Orbiter, 7:43:00 a.m EDT 12 de agosto de 2005.La Mars Reconnaissance Orbiter (acrónimo: MRO) es una nave espacial multipropósito, lanzada el 12 de agosto de 2005 para el avance del conocimiento humano de Marte a través de la observación detallada, con el fin de examinar potenciales zonas de aterrizaje para futuras misiones en la superficie y de realizar transmisiones para éstas. Es el cuarto satélite artificial en Marte (uniéndose a Mars Express, Mars Odyssey y Mars Global Surveyor). El 10 de octubre de 2006 comenzó su inserción en la la órbita marciana, concluyendo su fase de aerofrenado el 4 de septiembre. Sus estudios comienzan tras la conjunción solar de noviembre del mismo año.
La cámara HiRISE (High-Resolution Imaging Science Experiment, Experimento Científico de Imágenes de Alta Resolución) montada a bordo de la nave espacial MRO, obtuvo imágenes de gran definición durante un pasaje orbital de baja altitud realizado el 29 de septiembre de 2006 del cráter Victoria, en cuyo borde se encuentra el robot Opportunity. En dicha imagen es posible detectar la figura plateada del robot de la NASA y el trazo de su trayectoria en el suelo marciano. Estas imágenes del cráter Victoria permitirán a los científicos estadounidenses decidir a dónde hay que enviar al Opportunity para realizar un estudio de campo.
El 17 de noviembre de 2006 la NASA anunció la prueba con éxito del sistema de comunicación orbital. Usando el Rover Spirit como punto de origen de la transmisión, la sonda MRO actuó como un transmisor para mandar la información de regreso a la tierra.
Contenido
Antecedentes
La Sonda MRO fue propuesta a la NASA en 1999, pero llamada MSO cuya estrella seria su cámara de alta resolución. Se consideró para ser lanzada en 2003 aprovechando la ventana de lanzamiento hacia Marte de este año, pero esa ventana fue usada por los Rovers y perdió su oportunidad. Entonces se le puso en fila a ser lanzado en 2005.[1] y su nombre cambio a MRO en octubre de 2000.[2]
La MRO tiene el diseño similar a su hermana la Mars Global Surveyor pero se diferencia por su cámara de alta resolución, el científico de la NASA Jim Garvin la llama como un “microscopio en orbita”.[3]
El contratista encargado es Lockheed Martin para la fabricación de la MRO.[4] la sonda fue terminada y transportada a la Centro JFK el 1 de mayo de 2005 para ser preparada para su lanzamiento.[5]
Objetivos de la Misión
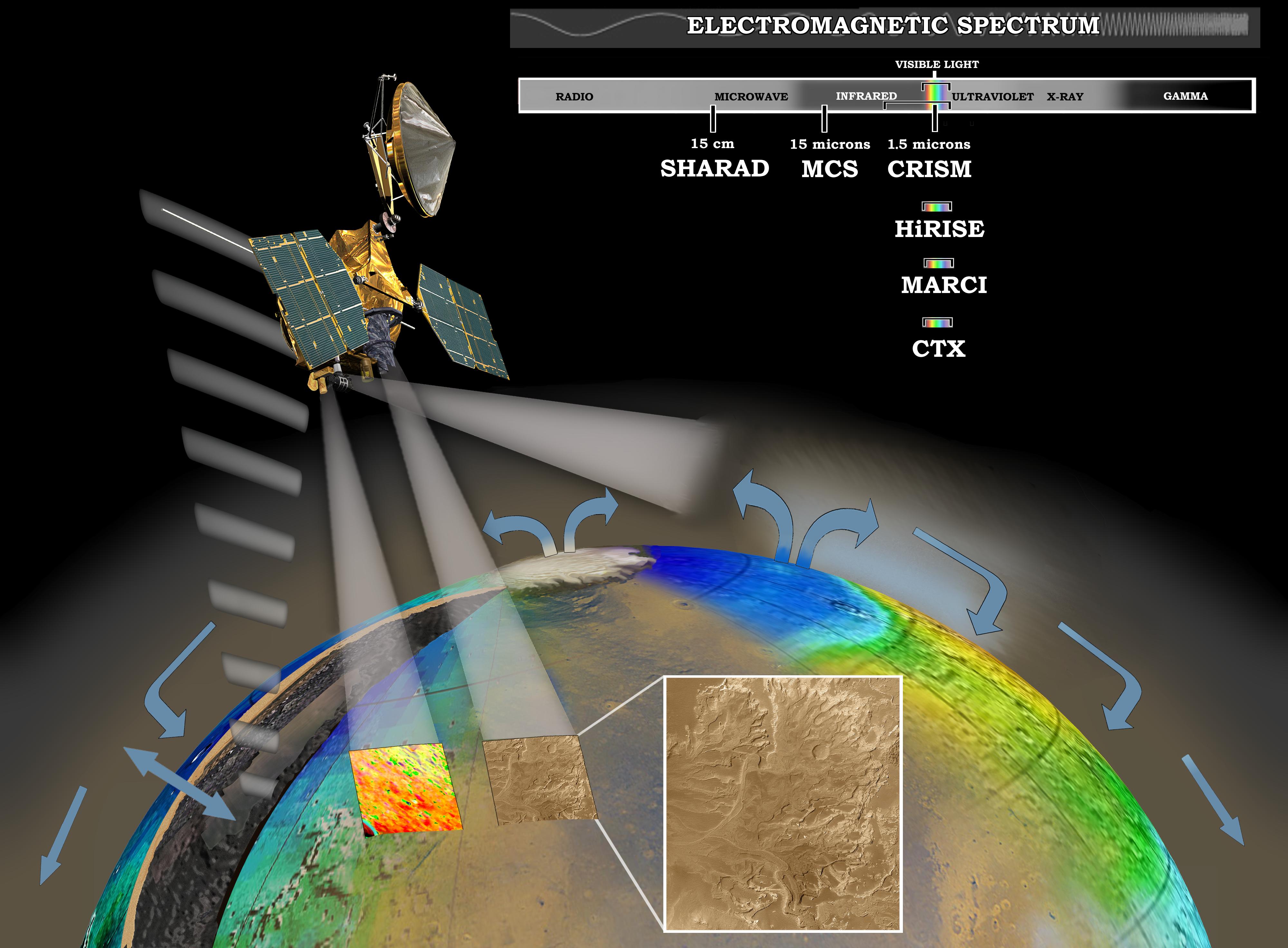
 MRO mapeando Marte (dibujo.
MRO mapeando Marte (dibujo.Su misión tendrá una duración de 2 años, desde noviembre de 2006 a noviembre de 2008. su principal objetivo es mapear Marte en alta resolución para tener mejores datos de lugares de amartizaje de futura misiones.
La MRO jugo un papel vital para la misión Phoenix (sonda) ya que proporcionó con detalle el lugar del descenso en el Ártico Marciano.[6]
MRO también será capaz de estudiar el clima de Marte, la composición de su atmósfera y su geología, también buscara rastros de agua en las capas polares y su subsuelo, otro objetivo es buscar los restos de la misión fallida Mars Polar Lander y la nave Beagle 2.[7], también pone el primer eslabon para hacer una red de Internet hacia los planetas del sistema solar.
Después del término de sus objetivos la misión se extenderá para servir como comunicación y faro de navegación para otras sondas y rovers.[8]
Lanzamiento e inserción orbital
La MRO fue lanzada el 12 de agosto de 2005, abordo de un cohete Atlas-V[1] desde Cabo Cañaveral usando la plataforma de lanzamiento de cohete 41, el cohete puso en orbita rumbo a Marte a la sonda por 56 minutos de ignición.[2]
La travesía hacia Marte duro 7.5 meses durante los cuales los instrumentos fueron revisados y calibrados, en el trayecto también se planearon 4 correcciones para tener una mejor inserción orbital.,[3] sin embargo solo se realizaron 3 correcciones ahorrando combustible.[4]
MRO llego a Marte el 10 de marzo de 2006 y comenzó con la maniobra de inserción orbital, pasando sobre el hemisferio Sur a solo 370-400 km, sus 6 motores estuvieron encendidos por 27 minutos para reducir la velocidad de 2,900 m/s a 1,900 m/s.[5]
Para el 30 de marzo de 2006, la MRO comenzó el procedimiento de aero frenado para así lograr una orbita circular, al termino de la operación se logró la periapsis en el extremo de la atmósfera el 30 de agosto de 2006, se realizaron 445 orbitas (aproximadamente 5 meses).[6]
El 17 de noviembre de 2006, la NASA anuncio las pruebas con éxito de los instrumentos de la MRO y el uso de la sonda como faro de comunicaciones, la primera prueba fue con el Rover Spirit que transmitió sus datos a MRO y esta actuó como retransmisor hacia la tierra.
Eventos y Descubrimientos
Gracias a las fotos de alta resolución se han descubierto nuevos detalles de la geología marciana, los cuales dieron como resultado el descubrimiento de terreno que indicaba la presencia dióxido de carbono liquido o agua en la superficie en su pasado geológico reciente.
El constructor de la sonda fue Lockheed Martin, pero la construcción en si de la nave se realizó por el Jet Propulsion Laboratory, los instrumentos científicos fueron hechos por la Universidad de Arizona, la Universidad Johns Hopkins y la Agencia Espacial Italiana.[7] el costo total de la nave MRO fue de $720 millones de dolares.[8]
La nave fue construida con titanio, nido de abeja, compuestos de carbono y aluminio, con forma de caja de 7,1m de longitud. En la parte superior se encuentra una gran antena parabólica de alta ganancia de 3 metros. En la caja se encuentran montados los equipos electrónicos, cableado, y los sistemas de propulsión. Al los dos lados de la caja, se encuentran los 2 paneles solares, divididos en 2 y con una superficie total de 10 metros. En la parte inferior de la caja se montan los instrumentos científicos, la antena UHF, y las cámaras. Detrás de la caja se encuentran los motores de propulsión. La nave pesaba en el lanzamiento 2180 kg, de los cuales 1149kg eran de combustible. Los mecanismos usados en la nave son: 1 cardán para mover la antena de alta ganancia, 2 cardanes para mover la posición de los paneles solares, de modo que puedan moverse de izquierda a derecha.
El sistema de propulsión se usa para mantener la nave en su posición, quemando la hidracina. El depósito de combustible contenía 1.187kg de hidracina para dar una velocidad de 1,4km/s, solo el 70% se uso para la inserción orbital en Marte. Un tanque de helio gaseoso de alta presión se usa para forzar el combustible y los motores. La nave contenía tuberías, válvulas y reguladores para el control del sistema de propulsión. Tenía 20 motores de cohete a bordo: 6 principales de 170N cada uno, para la inserción orbital, 6 motores de 22N para hacer maniobras de corrección de trayecto, y 8 pequeños para el control de posición. El control térmico se usa para mantener la nave a una temperatura exacta, usando radiadores para irradiar calor, mantas térmicas aislantes que aíslan y protegen la nave en el espacio, revestimientos de superficie para absorber calor, y los calentadores eléctricos, que son simples cables resistentes al calor, consumiendo cada uno 300W.
Para obtener electricidad, se usa 2 paneles solares con 10m de largo, con 3.744 células fotovoltaicas, que podían producir 3000W en la Tierra y 1000W en Marte. El voltaje era de 32 Voltios. Los paneles se usaron para el aerofreando. La electricidad iba acumulada en 2 baterías de NiH2(Níquel-Hidrógeno) con capacidad de 50 Amperios/hora para su uso en la oscuridad y cargas de máxima potencia. La orientación se determina mediante el uso de 8 pares de sensores de sol, para ubicar el Sol en el espacio, 2 rastreadores de estrellas con un mapa de miles de estrellas completo cada uno, y una doble unidad de medición inercial que usa 4 giroscopios para la estabilización y un acelerómetro para medir velocidades. También se usan los motores-cohete para el ajuste de velocidad y posición,y las 3 ruedas de reacción mas una como repuesto para mantener la posición de la nave.
Las telecomunicaciones se hacían en banda X, con una frecuencia de 8 Ghz. La nave llevaba 2 amplificadores de banda X de 100 Watts, y uno de banda Ka de 35W; dos transpondedores que transmiten y reciben. Para ello se usaba una antena parabólica de alta ganancia con 3 metros de diámetro, y 2 antenas de baja ganancia para comunicaciones auxiliares. Los sistemas de control y datos son el "cerebro de la nave". A bordo hay una computadora PowerPC de 133 Mhz, y un procesador de 32 bits RAD750, para la gestión de toda la nave. Un software VxWorks con numerosas aplicaciones son para controlar la nave, y es capaz de solucionar problemas en la nave. Los datos se almacenan en una grabadora de estado sólido que usa más de 700 chips de memoria de 256MB, en total su capacidad es de 160GB para su transmisión posterior a la Tierra.
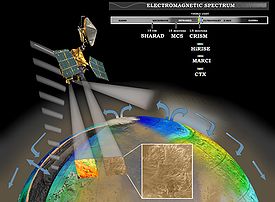
Los instrumentos científicos consisten en: Una cámara HiRISE para obtener fotos de alta resolución, un CTX(Context Imager) para observaciones en tiempo real con resolución de 6m/pixel, el MARCI(Mars Color Imager) para estudiar las variaciones del clima en Marte, el CRISM(Compact Reconnaisance Imaging Spectrometer Mars) para medir la distribución de humedad, calor, minerales y rastros de agua, MCS(Mars Climate Sounder) para medir la temperatura, humedad y polvo marciano, el SHARAD(Shallow Radar) para rastrear agua helada de hasta 1 Km con una resolución de 3 km, el Electra para las telecomunicaciones con los robots en el suelo, una cámara de navegación óptica para navegar la nave hasta Marte, un experimento de banda Ka para mejorar las comunicaciones de potencia menor, un experimento Doppler para medir el campo gravitatorio de Marte, y un acelerómetro de investigación de estructura atmosférica para obtener datos de la atmósfera superior de Marte, y la densidad de la atmósfera superior.
Evento y descubrimientos
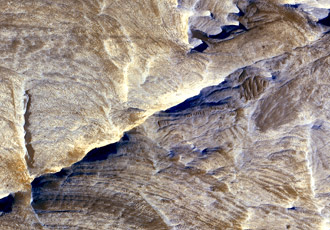
 Foto de alta resolución de Valle Marineris.
Foto de alta resolución de Valle Marineris.
El 29 de septiembre de 2006, la MRO tomó sus primeras fotografías en alta resolución, en las cuales se pueden distinguir objetos tan pequeños como de 90 centímetros de diámetro. El 6 de octubre de 2006, NASA liberó una imagen detallada del Cráter Victoria junto con el rover Opportunity justo en la orilla. [9] En noviembre de 2006, empezaron a surgir problemas de operación en 2 instrumentos de la nave.Referencias
- ↑ http://www.ilslaunch.com/newsarchives/newsreleases/rec312/
- ↑ Mars Reconnaissance Orbiter: Press Releases
- ↑ Mars Reconnaissance Orbiter: Multimedia
- ↑ U.S. Spacecraft Enters Orbit Around Mars - New York Times
- ↑ Spaceflight Now | Destination Mars | Mission Status Center
- ↑ Mars Reconnaissance Orbiter: The Mission
- ↑ Mars Reconnaissance Orbiter: People
- ↑ Search Results - THOMAS (Library of Congress)
Enlaces externos
- Mars Reconnaissance Orbiter website NASA english
- Mars Reconnaissance Orbiter website en JPL
- Mars Reconnaissance Orbiter fotos
- Mars Reconnaissance Orbiter Mission Profile
- Exploración de Marte Actividad educativa: Otras Naves Espaciales.
Categorías:- Satélites artificiales de Estados Unidos
- Sondas espaciales de Marte
- Misiones espaciales no tripuladas
- Satélites artificiales lanzados en 2005

Wikimedia foundation. 2010.