- Mars Pathfinder
-
Representación artística de la Mars Pathfinder sobre MarteCaracterísticas de la misión: Nombre Mars Pathfinder Nación Estados Unidos Objetivo(s) Aterrizaje sobre Marte
y operaciones vehiculares (rover).Nave Mars Pathfinder Nave – masa 870 kg Administración y diseño
de misiónJPL - NASA Vehículo de lanzamiento Delta 7925 (#D240) Fecha de
lanzamiento4 de diciembre de 1996
06:58:07 UTCSitio de lanzamiento ESMC / complejo de lanzamiento 17B Instrumentos científicos Lander Mars Pathfinder: - Sistema de imágenes IMP (incluye magnetos y medidores de viento),
- Espectrómetro de rayos X
Alfa Protón APXS, - Componentes de la estructura
atmosférica y meteorológica ASI / MET.
Rover Sojourner:
- Sistema de imágenes
(tres cámaras), - Rastreadores láser,
- Acelerómetros,
- Potenciómetros.
La Mars Pathfinder fue la primera de una serie de misiones a Marte que incluyen rovers (vehículos robóticos de exploración). Esta misión a Marte fue la más importante desde que las Viking aterrizaran sobre el planeta rojo en 1976 [cita requerida].
La Mars Pathfinder fue lanzada el 4 de diciembre de 1996 a bordo de un cohete Delta, un mes después del lanzamiento del Mars Global Surveyor y luego de 7 meses de viaje llegó a Marte el 4 de julio de 1997. El sitio de aterrizaje es Ares Vallis (Valle de Marte) en una región llamada Chryse Planitia (Planicies de Oro). Durante el viaje la nave realizó cuatro correcciones de vuelo: el 10 de enero, 3 de febrero, 6 de mayo y 25 de junio. El lander se abrió exponiendo al rover llamado Sojourner (en honor a la famosa abolicionista estadounidense Sojourner Truth) que realizaría diferentes experimentos en la superficie marciana.
La misión Mars Pathfinder llevó un conjunto de instrumentos científicos para analizar la atmósfera marciana, el clima, geología y la composición de las rocas y el suelo. El proyecto fue el segundo del programa Discovery de la NASA, el cual promueve el envío de naves de bajo costo y de lanzamientos frecuentes bajo la premisa “más barato, más rápido y mejor” sostenida por su administrador Daniel Goldin. La misión fue dirigida por el Jet Propulsion Laboratory (JPL), una división del Instituto de Tecnología de California ("CalTech"), responsable del Programa de Exploración a Marte de la NASA.
Objetivos de la misión Mars Pathfinder
- Probar que es posible el desarrollo de naves “más rápidas, mejores y más baratas” (con tres años para el desarrollo y con un costo inferior a los US$150 millones).
- Demostrar que es posible enviar una carga de instrumentos científicos a otro planeta con un sistema simple y a un quinto del valor de una misión Viking.
- Mostrar el compromiso de la NASA con la exploración planetaria de bajo costo al completar la misión con un valor total de US$280 millones, incluyendo el vehículo de lanzamiento y las operaciones de misión.
Operación de la misión
La Mars Pathfinder realizó diferentes investigaciones sobre el suelo marciano a través de tres instrumentos científicos. El lander –la plataforma de aterrizaje- contenía una cámara estereoscópica con filtros especiales en un mástil extensible llamado Sistema de Imágenes del Mars Pathfinder o Imager for Mars Pathfinder (IMP) y el Instrumento de la Estructura Atmosférica / Módulo de Meteorología (Atmospheric Structure Instrument / Meteorology Package (ASI /MET)) que actúa como una estación meteorológica de Marte, recogiendo datos sobre la presión, temperatura y vientos.
 El Sojourner cerca de Yogi
El Sojourner cerca de Yogi
El rover Sojourner disponía de un Espectrómetro de rayos X Alfa Protón (APXS), utilizado para el análisis de la composición de las rocas y el suelo. El rover también tenía dos cámaras en blanco y negro y una cámara en color. Estos instrumentos permitían realizar investigaciones geológicas de la superficie desde sólo unos milímetros hasta cientos de metros, así como investigar la geoquímica e historia evolutiva de la superficie y las rocas y las propiedades magnéticas y mecánicas del terreno, además de las propiedades magnéticas del polvo, la atmósfera y la dinámica rotacional y orbital marcianas.

Objetivos científicos de la Mars Pathfinder
- Morfología superficial y geología a escala métrica
- Petrología y geoquímica de los materiales superficiales
- Propiedades magnéticas y mecánicas de la superficie
- Estructura atmosférica, además de variaciones meteorológicas diurnas y nocturnas
- Dinámica rotacional y orbital de Marte
Etapas de la misión: entrada, descenso y amartizaje
El amartizaje de la Mars Pathfinder fue exactamente como había sido diseñado por los ingenieros de la NASA.

 Reconstrucción del aterrizaje
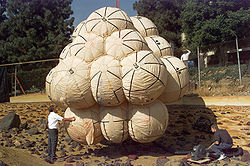
Reconstrucción del aterrizajeDurante las etapas de entrada se utilizaron los siguientes dispositivos: escudo de protección térmica y un gran paracaídas; el descenso del lander en un paracaídas de freno; el uso de un radar de altímetro para que el lander pudiera determinar cuán lejos de la superficie se ubicaba; retrocohetes para detener al lander durante su descenso; por último, 24 airbags se abrieron 8 segundos antes del impacto para amortiguar la caída una vez que el lander se desprendiera de su paracaídas. La velocidad de impacto fue de 10,6 metros por segundo. Todo este proceso se completó en un tiempo de 4 minutos.
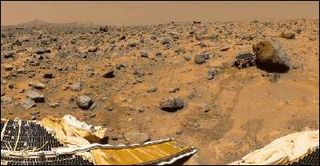
Una vez que el lander se ubicó sobre la superficie, los airbags se desinflaron y fueron retraídos con el lander sobre su base, para que finalmente se abrieran los pétalos con los paneles solares. El lander llegó durante la madrugada de Marte cerca de las 2:56:55 a.m. hora local (A las 16:56:55 UTC), por lo que el lander tuvo que esperar hasta que saliera el Sol para poder enviar las primeras señales a la Tierra. El sitio de aterrizaje está ubicado a 19,30° latitud norte y 33,52° longitud oeste en Ares Vallis, a unos 19 kilómetros al sudoeste del lugar planeado. Durante el Sol 1 –así es como se llaman los días marcianos– el lander tomó imágenes y realizó mediciones meteorológicas. Una vez recibida la información, los ingenieros se dieron cuenta de que uno de los airbags no estaba totalmente desinflado y podría ser causa de problemas para el posterior despliegue de la rampa de descenso del Sojourner. A tal efecto, enviaron órdenes al lander para subir y bajar uno de los pétalos del lander y así aplastar al airbag. El procedimiento fue un éxito.
Salida del Sojourner
 El Sojourner estudia a la roca "Yogi" después de haber salido del lander
El Sojourner estudia a la roca "Yogi" después de haber salido del lander Vista lateral del Sojourner
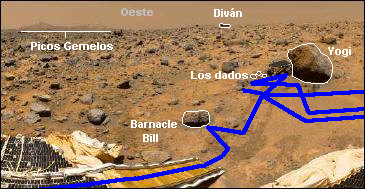
Vista lateral del SojournerLa salida del Sojourner se produjo en el Sol 2. En los soles siguientes se acercó a unas rocas llamadas por los científicos "Barnacle Bill", "Yogi" y "Scooby Doo" en honor a los famosos dibujos animados. El rover realizó mediciones de los elementos encontrados en esas rocas y el suelo marciano. El lander se encargó de fotografiar al Sojourner y el terreno circundante además de las observaciones climáticas.
El Sojourner era un vehículo de seis ruedas con un peso de 10,6 kg y estaba facultado para desplazarse unos 500 metros desde el lander. Su velocidad máxima era de 1 centímetro por segundo. Durante sus 83 días de operación en la superficie, el Sojourner envío a la Tierra cerca de 550 fotografías y completó el análisis químico en 16 locaciones diferentes cercanas al lander.
Las medidas del rover son: 65 centímetros de largo, 48 cm de ancho, y 30 cm de altura. Su peso en la Tierra era de 10,5 kilogramos mientras que en Marte –debido a la menor gravedad– sólo pesa el equivalente a 4 kg.
El sistema de control es un procesador Intel 80C85 de 8 bits que computa alrededor de 100.000 instrucciones por segundo. El ordenador es capaz de comprimir y almacenar una única imagen a bordo. El robot se alimenta de células solares de 0,2 metros cuadrados,que proporcionan la energía para varias horas de operaciones por sol (1 día marciano = 24,6 horas de la Tierra). 3 baterias de cloruro de tionilo de litio recargables (LiSOCl2) D-cell con capacidad de 50W/h proporcionan energía de reserva. Todas las comunicaciones Rover se realizan a través del módulo de aterrizaje.
El robot está equipado con cámaras de imagen en blanco y negro y color que se utilizaron para la imagen del robot a fin de evaluar su estado tras el aterrizaje. El objetivo era adquirir tres imágenes en blanco y negro espaciadas por 120 grados de separación de la sonda. También se obtuvieron imágenes de los terrenos circundantes para estudiar el tamaño y la distribución de los suelos y rocas, así como la aportación de grandes características. Las imagenes de las marcas de ruedas del robot será utilizadas para estimar las propiedades del suelo. Las imágenes del rover desde el Lander también se realizan para evaluar el rendimiento de vehículo y el suelo y las propiedades del sitio. El rendimiento del vehículo se observó para determinar las capacidades de seguimiento, el rendimiento del disco, comportamiento térmico, y el rendimiento del sensor. Las comunicaciones de banda UHF entre el rover y el aterrizador fue estudiada para determinar la eficacia de la relación entre el rover y aterrizador. Las evaluaciones de la roca y la mecánica de la superficie se hará sobre la base de la abrasión de las ruedas y la adherencia de polvo. Un espectrómetro alfa-protón de rayos X (APXS) está a bordo del vehículo para determinar la composición de las rocas y el suelo.Las fotos de todas las muestras analizadas se transmiten a la Tierra. Los objetivos primarios fueron programados para los primeros siete soles, todos dentro de unos 10 metros de la nave. La extensión de la misión incluye viajes un poco más lejos de la nave, y viajes aún más largos fueron planeados. Las imágenes fueron tomadas y los experimentos fueron realizados por el Lander y el vehículo hasta el 27 de septiembre de 1997, cuando las comunicaciones se perdieron por causas desconocidas.

Los estudios del Sojourner
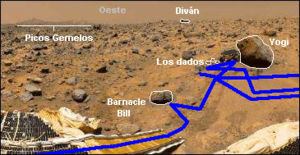 Detalle del trayecto y rocas circundantes
Detalle del trayecto y rocas circundantesEl primer análisis sobre una roca en Marte comenzó en el Sol 3 con el estudio de "Barnacle Bill". El Espectrómetro de rayos X Alfa Protón (APXS) fue empleado para determinar su composición. El espectrómetro necesitaba cerca de 10 horas de análisis para llevar a cabo un estudio completo. Midió todos los elementos con excepción del hidrógeno, ya que constituye cerca de una décima parte del 1 por ciento de la masa de la roca o el suelo.
El APXS lleva a cabo sus estudios al bombardear rocas y muestras de suelo con partículas de radiación alfa –partículas cargadas equivalentes al núcleo de un átomo de helio, formadas por dos protones y dos neutrones. Los resultados indicaron que "Barnacle Bill" es similar a las andesitas terrestres, confirmando la actividad volcánica en el pasado de Marte.
Los estudios llevados a cabo sobre la roca "Yogi" muestran que ésta es de diferente composición, ya que según a los datos derivados del APXS ésta es una roca basáltica más primitiva que "Barnacle Bill". La forma y la textura superficial de "Yogi" muestran que probablemente fue depositada por una inundación. En otra roca llamada "Moe", el Sojourner encontró marcas sobre la superficie que dan muestra de la erosión del viento. El análisis del APXS muestra que la mayoría de las rocas estudiadas tienen un alto contenido de silicio. En otra región que se llamó “Jardín de Rocas” el Sojourner encontró dunas con forma de luna creciente, idénticas a las dunas barcanoides que se forman en la Tierra.
El lander, por su parte, transmitió más de 16.500 imágenes y realizó 8,5 millones de mediciones de la presión atmosférica, temperatura y velocidad del viento.
Fin de la misión
Aunque la misión estaba programada para durar un mes y una semana, estos límites fueron excedidos por 3 veces y 12 veces respectivamente. El contacto final con la Pathfinder fue a las 10:23 UTC del 27 de septiembre de 1997. aunque los planificadores de la misión trataron de restablecer contacto durante los siguientes cinco meses, la exitosa misión fue dada por terminada el 10 de marzo de 1998. Después del aterrizaje, la Mars Pathfinder fue renombrada como la Sagan Memorial Station en honor al famoso astrónomo y planetólogo Carl Sagan. En total, la misión excedió en pocos días las metas establecidas.
Vista panorámica.Referencias
- Mars Pathfinder Litograph Set, NASA. (1997)
- Póster: Mars Pathfinder –Roving the Red Planet, NASA. (1998)
- Deep Space Chronicle: A Chronology of Deep Space and Planetary Probes 1958-2000, Asif A. Siddiqi. Monographs in Aerospace History, #24. Junio de 2002, NASA History Office.
- "Mars Pathfinder: el inicio de la conquista de Marte" EL Universo, Enciclopedia de la Astronomía y el Espacio, Editorial Planeta-De Agostini, págs. 58-60. Tomo 5. (1997)
- "Return to Mars", artículo de William R. Newcott. National Geographic, págs. 2-29. Vol. 194, edición número 2 - agosto de 1998. (versión inglés)
- "La misión Pathfinder –rebautizada Carl Sagan Memorial Station, en memoria del célebre astrónomo-, paso a paso todo Marte", de J. Roberto Mallo. Conozca Más, págs. 90-96. Edición número 106 - agosto de 1997.
- "Un espía que anda por Marte", de Julio Guerrieri. Descubrir, págs. 80-83. Edición número 73 - agosto de 1997.
Bibliografía sobre Marte
- The New Solar System, tercera edición, Beaty, J.K., y Chaikin, entre otros. Sky Publishing Corp., Cambridge. (1990)
- The Surface of Mars, M.H. Carr. Yale University Press, New Haven. (1981)
- Exploring the Planets, segunda edición, E.H. Christiansen y W.K. Hamblin. Prentice-Hall, Englewood Cliffs, Nueva Jersey. (1995)
- The Search for Life on Mars: Evolution of an Idea, H.S.F. Cooper. Holt, Rinehart, y Winston, Nueva York. (1980)
- Mars, Percival Lowell. Houghton, Mifflin, Boston, Nueva York. (1895)
- Journey Into Space: The First Thirty Years of Space Exploration, B. Murray. W.W. Norton, Nueva York. (1989)
- Planets & Perception: Telescopic Views and Interpretations, 1609-1909, W. Sheehan. University Arizona Press, Tucson, Arizona. (1988)
- The Planet Mars: A History of Observation and Discovery, W. Sheehan. University Arizona Press, Tucson, Arizona. (1996)
- The Martian Landscape, Viking Lander Imaging Team. NASA SP-425. (1978)
- Viking Orbiter Views of Mars, Vikig Orbiter Imagen Team. NASA SP-441. (1980)
- Mars Beckons, J.N. Wilford. Alfred A. Knopf, Nueva York. (1990)
Véase también
Enlaces externos
 Wikimedia Commons alberga contenido multimedia sobre Mars Pathfinder. Commons
Wikimedia Commons alberga contenido multimedia sobre Mars Pathfinder. Commons- Mars Pathfinder
- NASA Office of Space Science
- JPL - Rovers a Marte
- Exploración de Marte Actividad educativa: Otras Naves Espaciales.
Categorías:- Programa espacial de Estados Unidos
- Sondas espaciales de Marte



Wikimedia foundation. 2010.