- Método matricial de la rigidez
-
El método matricial de la rigidez es un método de cálculo aplicable a estructuras hiperestáticas de barras que se comportan de forma elástica y lineal.
Contenido
Introducción
El método consiste en asignar a la estructura de barras un objeto matemático, llamado matriz de rigidez, que relaciona los desplazamientos de un conjunto de puntos de la estructura, llamados nodos, con las fuerzas exteriores que es necesario aplicar para lograr esos desplazamientos (las componentes de esta matriz son fuerzas generalizadas asociadas a desplazamientos generalizados). La matriz de rigidez relaciona las fuerzas nodales equivalentes y desplazamientos sobre los nodos de la estructura, mediante la siguiente ecuación:
(1)

Donde:
 son las fuerzas nodales equivalentes asociadas a las fuerzas exteriores aplicadas sobre la estructura;
son las fuerzas nodales equivalentes asociadas a las fuerzas exteriores aplicadas sobre la estructura;  son las reacciones hiperestáticas inicialmente desconocidas sobre la estructura;
son las reacciones hiperestáticas inicialmente desconocidas sobre la estructura;  los desplazamientos nodales incógnita de la estructura y
los desplazamientos nodales incógnita de la estructura y  el número de grados de libertad de la estructura.
el número de grados de libertad de la estructura.La energía de deformación elástica también puede expresarse en términos de la matriz de rigidez mediante la relación:
![E_{def} = \frac{1}{2} \boldsymbol{\delta} \cdot [\mathbf{K}(\boldsymbol{\delta})] =
\frac{1}{2} \sum_{i,j} k_{ij}\delta_i\delta_j](e/aaeec6c665eac0ca22f62b18592f435a.png)
Del teorema de Maxwell-Betti se deduce que la matriz de rigidez debe ser simétrica y por tanto:

Fundamento teórico
En general, un sólido deformable real, como cualquier medio continuo es un sistema físico con un número infinito de grados de libertad. Así sucede que en general para describir la deformación de un sólido necesitándose explicitar un campo vectorial de desplazamientos sobre cada uno de sus puntos. Este campo de desplazamientos en general no es reductible a un número finito de parámetros, y por tanto un sólido deformable de forma totalmente general no tiene un número finito de grados de libertad.
Sin embargo, para barras largas elásticas o prismas mecánicos de longitud grande comparada con el área de su sección transversal, el campo de desplazamientos viene dado por la llamada curva elástica cuya deformación siempre es reductible a un conjunto finito de parámetros. En concreto, fijados los desplazamientos y giros de las secciones extremas de una barra elástica, queda completamente determinada su forma. Así, para una estructura formada por barras largas elásticas, fijados los desplazamientos de los nudos, queda completamente determinada la forma deformada de dicha estructura. Esto hace que las estructuras de barras largas puedan ser tratadas muy aproximadamente mediante un número finito de grados de libertad y que puedan ser calculadas resolviendo un número finito de ecuaciones algebráicas. El método matricial proporciona esas ecuaciones en forma de sistema matricial que relaciona los desplazamientos de los extremos de la barras con variables dependientes de las fuerzas exteriores.
Esto contrasta con la situación general de los sólidos elásticos, donde el cálculo de sus tensiones internas y deformaciones involucra la resolución de complejos sistemas de ecuaciones diferenciales en derivadas parciales.
Descripción del método
El método matricial requiere asignar a cada barra elástica de la estructura una matriz de rigidez, llamada matriz de rigidez elemental que dependerá de sus condiciones de enlace extremo (articulación, nudo rígido,...), la forma de la barra (recta, curvada, ...) y las constantes elásticas del material de la barra (módulo de elasticidad longitudinal y módulo de elasticidad transversal). A partir del conjunto de matrices elementales mediante un algoritmo conocido como acoplamiento que tiene en cuenta la conectividad de unas barras con otras se obtiene una matriz de rigidez global, que relaciona los desplazamientos de los nudos con las fuerzas equivalentes sobre los mismos.
Igualmente a partir de las fuerzas aplicadas sobre cada barra se construye el llamado vector de fuerzas nodales equivalentes que dependen de las acciones exteriores sobre la estructura. Junto con estas fuerzas anteriores deben considerarse las posibles reacciones sobre la estructura en sus apoyos o enlaces exteriores (cuyos valores son incógnitas).
Finalmente se construye un sistema lineal de ecuaciones, para los desplazamientos y las incógnitas. El número de reacciones incógnita y desplazamientos incógnita depende del número de nodos: es igual a 3N para problemas bidimensionales, e igual a 6N para un problema tridimensional. Este sistema siempre puede ser dividido en dos subsistemas de ecuaciones desacoplados que cumplen:
- Subsistema 1. Que agrupa todas las ecuaciones lineales del sistema original que sólo contienen desplazamientos incógnita.
- Subsistema 2. Que agrupa al resto de ecuaciones, y que una vez resuelto el subsistema 1 y substituido sus valores en el subsistema 2 permite encontrar los valores de las reacciones incógnita.
Una vez resuelto el subsistema 1 que da los desplazamientos, se substituye el valor de estos en el subsistema 2 que es trivial de resolver. Finalmente a partir de las reacciones, fuerzas nodales equivalentes y desplazamientos se encuentran los esfuerzos en los nudos o uniones de las barras a partir de los cuales pueden conocerse los esfuerzos en cualquier punto de la estructura y por tanto sus tensiones máximas, que permiten dimensionar adecuadamente todas las secciones de la estructura.
Matrices de rigidez elementales
Para construir la matriz de rigidez de la estructura es necesario asignar previamente a cada barra individual (elemento) una matriz de rigidez elemental. Esta matriz depende exclusivamente de:
- Las condiciones de enlace en sus dos extremos (barra bi-empotrada, barra empotrada-articulada, barra biarticulada).
- Las características de la sección transversal de la barra: área, momentos de área (momentos de inercia de la sección) y las características geométricas generales como la longitud de la barra, curvatura, etc.
- El número de grados de libertad por nodo, que depende de si se trata de problemas bidimensionales (planos) o tridimensionales.
La matriz elemental relaciona las fuerzas nodales equivalentes a las fuerzas aplicadas sobre la barra con los desplazamientos y giros sufridos por los extremos de la barra (lo cual a su vez determina la deformada de la barra).
Barra recta bidimensional de nudos rígidos
Un nudo donde se unen dos barras se llama rígido o empotrado si el ángulo formado por las dos barras después de la deformación no cambia respecto al ángulo que formaban antes de la deformación. Aún estando imposibilitado para cambiar el ángulo entre barras las dos barras en conjunto, pueden girar respecto al nodo, pero manteniendo el ángulo que forman en su extremo. En la realidad las uniones rígidas soldadas o atornilladas rígidamente se pueden tratar como nudos rígidos. Para barra unida rígidamente en sus dos extremos la matriz de rigidez elemental que representa adecuadamente su comportamiento viene dada por:
Donde:
 son las magnitudes geométricas (longitud, área y momento de inercia).
son las magnitudes geométricas (longitud, área y momento de inercia).
 la constante de elasticidad longitudinal (módulo de Young).
la constante de elasticidad longitudinal (módulo de Young).Alternativamente la matriz de rigidez de una barra biempotrada recta puede escribirse más abreviadamente, introduciendo la esbeltez mecánica característica:
Donde: es la es esbeltez mecánica característica.
es la es esbeltez mecánica característica.Barra recta bidimensional con un nudo articulado y otro rígido
En este caso cuando se imponen giros en el nudo articulado no se transmiten esfuerzos hacia el nudo no articulado. En ese caso la matriz de rigidez, usando la misma notación que en la sección anterior, viene dada por:
![\left [ K^{(e)} \right ] = \frac{EI}{L^3} \begin{bmatrix}
\lambda_k^2 & 0 & 0 & -\lambda_k^2 & 0 & 0 \\
0 & 3 & 3L & 0 & -3 & 0 \\
0 & 3L & 3L^2 & 0 & -3L & 0 \\
-\lambda_k^2 & 0 & 0 & \lambda_k^2 & 0 & 0 \\
0 & -3 & -3L & 0 & 3 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 \end{bmatrix}](3/2d3a48405f55443b3a27cd9f8adc34f9.png)
Donde se ha supuesto que el nudo articulado es el segundo. Si fuera el primero, habría que permutar los elmentos de la matriz anterior para obtener:
![\left [ K^{(e)} \right ] = \frac{EI}{L^3} \begin{bmatrix}
\lambda_k^2 & 0 & 0 & -\lambda_k^2 & 0 & 0 \\
0 & 3 & 0 & 0 & -3 & -3L \\
0 & 0 & 0 & 0 & 0 & 0 \\
-\lambda_k^2 & 0 & 0 & \lambda_k^2 & 0 & 0 \\
0 & -3 & 0 & 0 & 3 & 3L \\
0 & -3L & 0 & 0 & 3L & 3L^2 \end{bmatrix}](0/2103ee6eca46414d02b9d83f6ecbfa15.png)
Barra recta bidimensional con dos nudos articulados
Puesto que una barra recta de nudos articulados sólo puede transmitir esfuerzos a lo largo de su eje, la correpondiente matriz de rigidez de esa barra sólo tiene componentes diferentes para los grados de libertad longitudinales. En ese caso la matriz de rigidez, usando la misma notación que en la sección anterior, viene dada por:
![\left [ K^{(e)} \right ] = \frac{EA}{L} \begin{bmatrix}
+1 & 0 & 0 & -1 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 \\
-1 & 0 & 0 & +1 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 \end{bmatrix}](b/92be0a16f6c65bb917359599da6fed41.png)
Arco circular bidimensional de nudos rígidos
Barra recta tridimensional de nudos rígidos
Una barra recta tridimensional tiene 6 grados de libertad por nudo (3 de traslación y 3 de orientación), como la barra tiene dos nudos la matriz de rigidez es una matriz de 12 x 12. Además una barra tridimensional puede transmitir torsiones, y también flexión y esfuerzo cortante en dos direcciones diferentes, esa mayor complejida de comportamiento estructural es lo que hace que una barra tridimensional requiera más grados de libertad y un matriz de rigidez más compleja para describir su comportamiento, esta matriz está compuesta de 3 submatrices:
Donde las submatrices son:
Y las magntiudes geométricas y mecánicas asociadas a la barra son:
 son las magnitudes geométricas: longitud de la barra y su área transversal, momentos de área en las direcciones y y z y módulo de torsión, respectivamente.
son las magnitudes geométricas: longitud de la barra y su área transversal, momentos de área en las direcciones y y z y módulo de torsión, respectivamente. la el módulo de elasticidad longitudinal y el módulo de elasticidad transversal.
la el módulo de elasticidad longitudinal y el módulo de elasticidad transversal. son signos relativos.
son signos relativos.
Fuerzas nodales
Para cada barra se define un vector elemental de fuerzas nodales generalizadas, que sea estáticamente equivalente, a las fuerzas aplicadas sobre la barra. El tamaño del vector de fuerzas nodales depende de la dimensionalidad de la barra:
Las componentes de este vector conforman un sistema de fuerzas y momentos de fuerza, tal que la fuerza resultante y el momento resultante de las mismas coinciden con la fuerza y momento del sistema de fuerzas original sobre la barra.Ejemplo
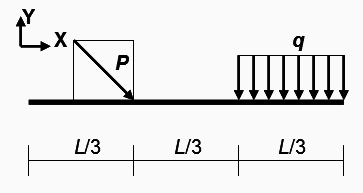
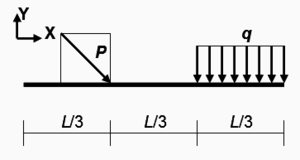 Ejemplo de carga sobre una viga, P es una carga puntual, y q representa una carga por unidad de longitud.
Ejemplo de carga sobre una viga, P es una carga puntual, y q representa una carga por unidad de longitud.
Para las cargas mostradas en la figura adjunta sobre una barra o viga bidimensional el vector de fuerzas nodales consiste en dos fuerzas verticales (FVd, FVi) aplicadas en cada uno de los dos extremos, dos fuerzas horizontales (FHd, FHi) aplicadas en cada uno de los extremos y dos momentos de fuerza (Md, Mi) aplicados en cada uno de los extremos. Esas seis componentes forman el vector de fuerzas nodales. Es sencillo comprobar que la fuerza y el momento resultantes de estas seis componentes son estáticamente equivalentes al sistema de fuerzas original formado por P y q si se toman los siguientes valores:
Cálculo de desplazamientos
Una vez encontrada la matriz de rigidez global y el vector de fuerzas nodales global se construye un sistema de ecuaciones como (). Este sistema tiene la propiedad de que puede descomponerse en dos subsistemas de ecuaciones:
- El primero de estos sistemas relaciona únicamente los desplazamientos incógnita con algunas de las componentes del vector de fuerzas nodales global y constituye siempre un sistema compatible determinado
- El segundo subsistema contiene también las reacciones incógnita y una vez resuelto el primer subsistema es de resolución trivial.
Resolviendo el primer subsistema compatible determinado, se conocen los desplazamientos incógnita de todos los nudos de la estructura. Insertando la solución del primer subsistema en el segundo resultan las reacciones.
Podemos ilustrar el cálculo de desplazamientos con un ejemplo. Por ejemplo si consideramos la flexión en el plano XY de la viga recta de la sección anterior considerando que se trata de una viga biarticulada unida en sus extremos a dos rótulas fijas tendríamos que el sistema general () tendría la forma para este caso particular:

Las filas 3 y 6 contienen los giros (desplazamientos) incógnita de los extremos de la viga y tomadas en conjunto conforman el primer subsistema para los desplazamientos. Ignorando los términos nulos y reescrito en forma matricial el subsistema de ecuaciones para los desplazamientos es simplemente:

Cuya solución nos da el valor del ángulo girado por el extremo derecho e izquierdo de la viga bajo esas cargas:

Una vez conocidos estos valores e insertados en la matriz las filas 1, 2, 4 y 5 nos proporcionan en valor de las cuatro reacciones hiperestáticas desconocidas previamente.
Cálculo de reacciones
Una vez calculados los desplazamientos resolviendo un sistema de ecuaciones, el cálculo de las reacciones es sencillo. A partir de la ecuación () tenemos simplemente:

Tomando el mismo ejemplo que en la última sección el cálculo de reacciones sobre la viga biarticulada con carga P y q sería:

Introduciendo los valores de los giros en los extremos y multiplicando la matriz de rigidez por el vector de desplazamientos se tiene finalmente que:

Esto completa el cálculo de reacciones.
Cálculo de esfuerzos
El cálculo de esfuerzos se realiza examinando en coordenadas locales de las barras el esfuerzo axial, los esfuerzos cortantes, los momentos flectores y el momento torsor generados en cada una de las barras, conocidos los desplazamientos de todos los nudos de la estructura. Esto puede hacerse usando las matrices de rigidez expresadas en coordenadas locales y los desplazamientos nodales expresados también en coordenadas locales.
Análisis dinámico
El análisis estático discutido anteriormente puede generalizarse para encontrar la respuesta dinámica de una estructura. Para ello se require representar el comportamiento inercial de la estructura mediante una matriz de masa
 , modelizar las fuerzas disipativas mediante una matriz de amortiguamiento
, modelizar las fuerzas disipativas mediante una matriz de amortiguamiento  , que junto con la matriz de rigidez
, que junto con la matriz de rigidez  permiten plantear un sistema de ecuaciones de segundo orden del tipo:
permiten plantear un sistema de ecuaciones de segundo orden del tipo:
La solución del sistema anterior pasa por un cálculo de las frecuencias propias y los modos propios. Admitiendo que las fuerzas disipativas son poco importantes las frecuencias propias se pueden determinar resolviendo la siguiente ecuación polinómica en
 :
:
Esas magnitudes permiten realizar un análisis modal que reproduce el comportamiento de la estructura bajo diferentes tipos de situaciones.
Referencia
Bibliografía
- Timoshenko, Stephen; Godier J.N.. McGraw-Hill. ed. Theory of elasticity.
- Ortiz Berrocal, Luis. McGraw-Hill. ed. Resistencia de Materiales. Aravaca (Madrid). ISBN 84-7651-512-3.
- Monleón Cremades, S., Análisis de vigas, arcos, placas y láminas, Ed. UPV, 1999, ISBN 84-7721-769-6.
Enlaces externos
Programas
![\left [ K^{(e)} \right ] =
\begin{bmatrix}
\frac{EA}{L} & 0 & 0 & -\frac{EA}{L} & 0 & 0 \\
0 & \frac{12EI}{L^3} & \frac{6EI}{L^2} & 0 & -\frac{12EI}{L^3} & \frac{6EI}{L^2} \\
0 & \frac{6EI}{L^2} & \frac{4EI}{L} & 0 & -\frac{6EI}{L^2} & \frac{2EI}{L} \\
-\frac{EA}{L} & 0 & 0 & \frac{EA}{L} & 0 & 0 \\
0 & -\frac{12EI}{L^3} & -\frac{6EI}{L^2} & 0 & \frac{12EI}{L^3} & -\frac{6EI}{L^2} \\
0 & \frac{6EI}{L^2} & \frac{2EI}{L} & 0 & -\frac{6EI}{L^2} & \frac{4EI}{L}
\end{bmatrix}](1/e81e8c39f66d81b1852f19b1734d8489.png)
![\left [ K^{(e)} \right ] =
\frac{EI}{L^3}
\begin{bmatrix}
\lambda_k^2 & 0 & 0 & -\lambda_k^2 & 0 & 0 \\
0 & 12 & 6L & 0 & -12 & 6L \\
0 & 6L & 4L^2 & 0 & -6L & 2L^2 \\
-\lambda_k^2 & 0 & 0 & \lambda_k^2 & 0 & 0 \\
0 & -12 & -6L & 0 & 12 & -6L \\
0 & 6L & 2L^2 & 0 & -6L & 4L^2
\end{bmatrix}](4/a0437a8b9c5734e6920811f894d7b001.png)
![\left [ K^{(e)} \right ] = \begin{bmatrix} \mathbf{A}_1 & \mathbf{B}^T \\
\mathbf{B} & \mathbf{A}_2 \end{bmatrix}](a/64a1c14008e6a441123fa023fda5a8d6.png)
![\left [ \mathbf{A}_i \right ] = \begin{bmatrix}
\frac{EA}{L} & 0 & 0 & 0 & 0 & 0 \\
0 & \frac{12EI_y}{L^3} & 0 & 0 & 0 & \epsilon_i\frac{6EI_y}{L^2} \\
0 & 0 & \frac{12EI_z}{L^3} & 0 & -\epsilon_i\frac{6EI_z}{L^2} & 0 \\
0 & 0 & 0 &\frac{GJ}{L} & 0 & 0 \\
0 & 0 & -\epsilon_i\frac{6EI_z}{L^2} & 0 &\frac{4EI_y}{L} & 0 \\
0 & \epsilon_i\frac{6EI_y}{L^2} & 0 & 0 & 0 &\frac{4EI_z}{L} \\
\end{bmatrix}](0/f00e05debc771eb879fd7d6b95736b97.png)
![\left [ \mathbf{B} \right ] = \begin{bmatrix}
-\frac{EA}{L} & 0 & 0 & 0 & 0 & 0 \\
0 & -\frac{12EI_y}{L^3} & 0 & 0 & 0 & -\frac{6EI_y}{L^2} \\
0 & 0 & -\frac{12EI_z}{L^3} & 0 & +\frac{6EI_z}{L^2} & 0 \\
0 & 0 & 0 &-\frac{GJ}{L} & 0 & 0 \\
0 & 0 & -\frac{6EI_z}{L^2} & 0 &\frac{2EI_y}{L} & 0 \\
0 & \frac{6EI_y}{L^2} & 0 & 0 & 0 &\frac{2EI_z}{L} \\
\end{bmatrix}](e/d8e0f8cb0033ca27da80c79006ba715d.png)


Wikimedia foundation. 2010.