- Orientación (geometría)
-
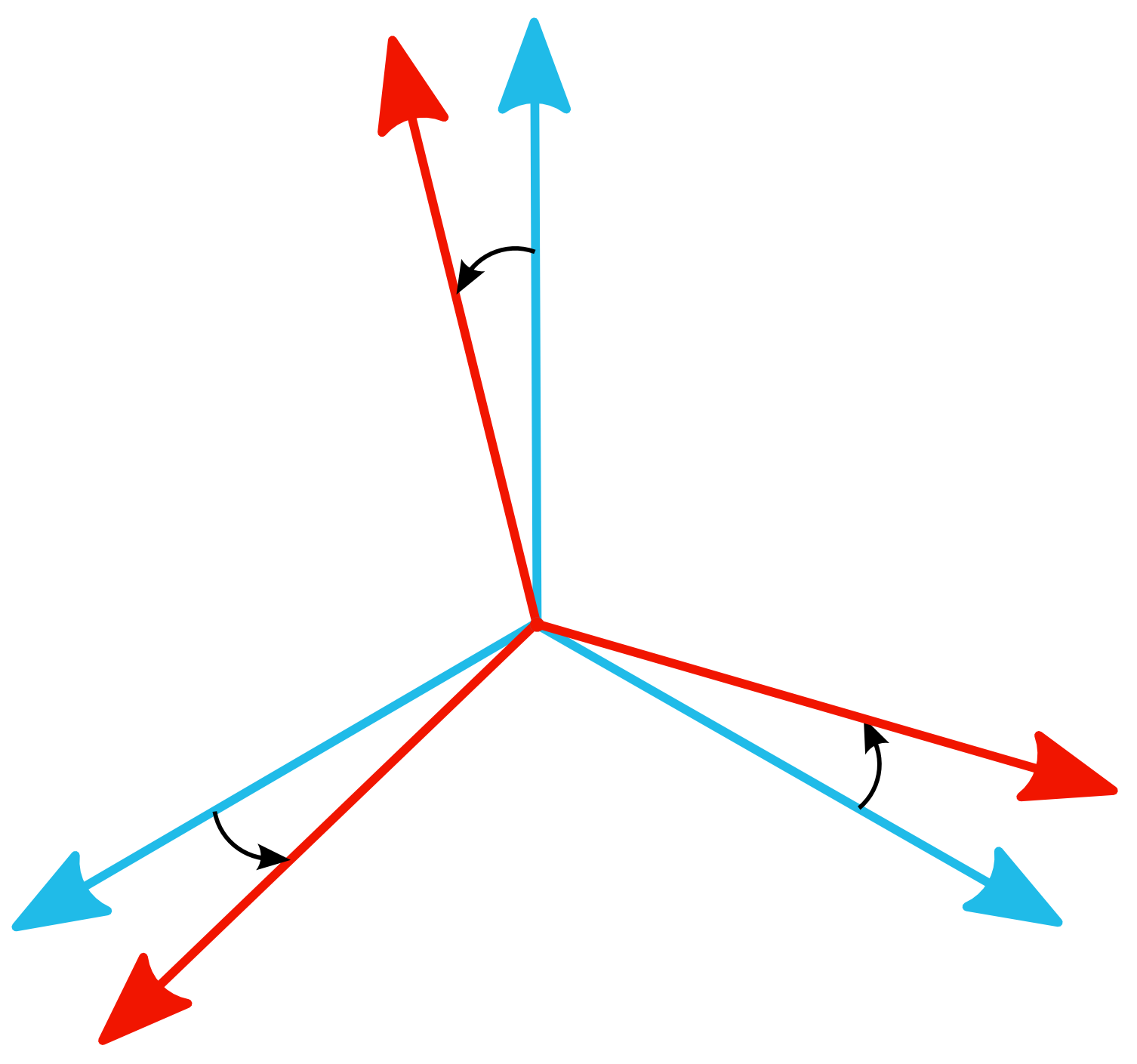
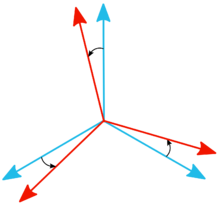 Cambiar la orientación es equivalente a girar los ejes coordenados.
Cambiar la orientación es equivalente a girar los ejes coordenados.
Una orientación de un objeto en el espacio es cada una de las posibles elecciones para colocarlo sin cambiar un punto fijo de referencia. Puesto que el objeto con un punto fijo puede todavía ser rotado alrededor de ese punto fijo, la posición del punto de referencia no especifica por completo la posición, por tanto para especificar completamente la posición necesitamos especificar también la orientación. La orientación puede visualizarse añadiendo una base vectorial ortogonal al punto de referencia del objeto; diferentes bases representarían diferentes orientaciones.
Contenido
Ángulos de Euler
Otra forma posible de definir la orientación es fijar una serie de ángulos que llevarían al cuerpo desde una posición especificada por una base vectorial a otra base que define una nueva orientación. Normalmente se toman los tres ángulos de Euler, llamados precesión, nutación y rotación.
En un espacio de n dimensiones el número ángulos necesario para especificar un cambio de orientación es n(n-1)/2, así en el plano (n = 2) un sólo ángulo alrededor de un eje perpendicular al mismo define la orientación, en el espacio tridimensional (n = 3) necesitamos tres ángulos para especificar la posición, por ejemplo los ángulos de Euler. Podemos generalizar el concepto de rotación para n > 3, en un espacio n-dimensional el conjunto de rotaciones o cambios de orientaciones es precisamente el grupo SO(n) que como grupo (de matrices) tiene dimensión igual a n(n-1)/2.
Teorema de Euler y notación matricial
El resultado más importante de Euler sobre la orientación es que toda combinación de rotaciones es equivalente a una única rotación. Aunque la notación matricial fue introducida después, se ve fácilmente que la composición de giros es el producto de matrices. El teorema afirma que el producto de dos matrices de rotación es una nueva matriz de rotación. En concreto, los tres ángulos de Euler anteriores corresponden a tres matrices de rotación, y por tanto combinadas son equivalentes a una sola.
Vector de Euler o de rotación
Otro teorema es que toda matriz de rotación tiene un autovector real, que determina el eje de rotación. Basándose en esto, Euler introdujo una notación alternativa para las rotaciones basada en un vector, que determina la orientación, y que se define como perpendicular al plano de giro y de módulo el valor del ángulo girado. Al venir cada orientación definida por un giro desde el origen, se puede dar la orientación usando este vector.también la rotación es cuando dos figuras geométricas camboan de posición
Notación con cuaterniones
Los vectores de rotación anteriores tienen todos módulo menor o igual que PI, ya que un giro mayor es realmente un giro al revés. Usando esta propiedad, se pueden reescribir los giros como cuaterniones, que son vectores de cuatro componentes y módulo uno. Tienen la ventaja de que se convierten más fácilmente a matriz.
También se conocen como Ángulos de Cardano, por Gerolamo Cardano, o de Tait-Bryan, por el físico escocés Peter Guthrie Tait, son tres ángulos que definen una rotación de forma única respecto de los ejes intrínsecos de un objeto (apropiado por ejemplo para que el piloto de un avión describa sus maniobras).
A diferencia de los de Euler, las tres rotaciones son respecto de los ejes intrínsecos. Se denominan en castellano cabeceo, guiñada y alabeo, pero suelen usarse con sus nombres en inglés (Yaw, Pitch y Roll). Se usan mucho en ingeniería aerospacial, donde se les suele llamar "Ángulos de Euler", creando confusión con la terminología usada en matemáticas.
Orientación de un sólido rígido
Todo lo anterior son conceptos puramente geométricos, pero aplicables para describir las posiciones de cuerpos en el espacio.
Como se ha dicho la orientación de un sólido rígido en el espacio tridimensional o en el plano cambia por rotación. Cuando el sólido tiene simetría rotacional, no todas las orientaciones son visualmente distinguibles (por ejemplo cuando se gira una esfera alrededor de su centro en cualquier dirección no distinguimos cambios, o lo mismo cuando giramos un cilindro alrededor de su eje).esto también se es conocido como giro.
Wikimedia foundation. 2010.