- Mars Science Laboratory
-
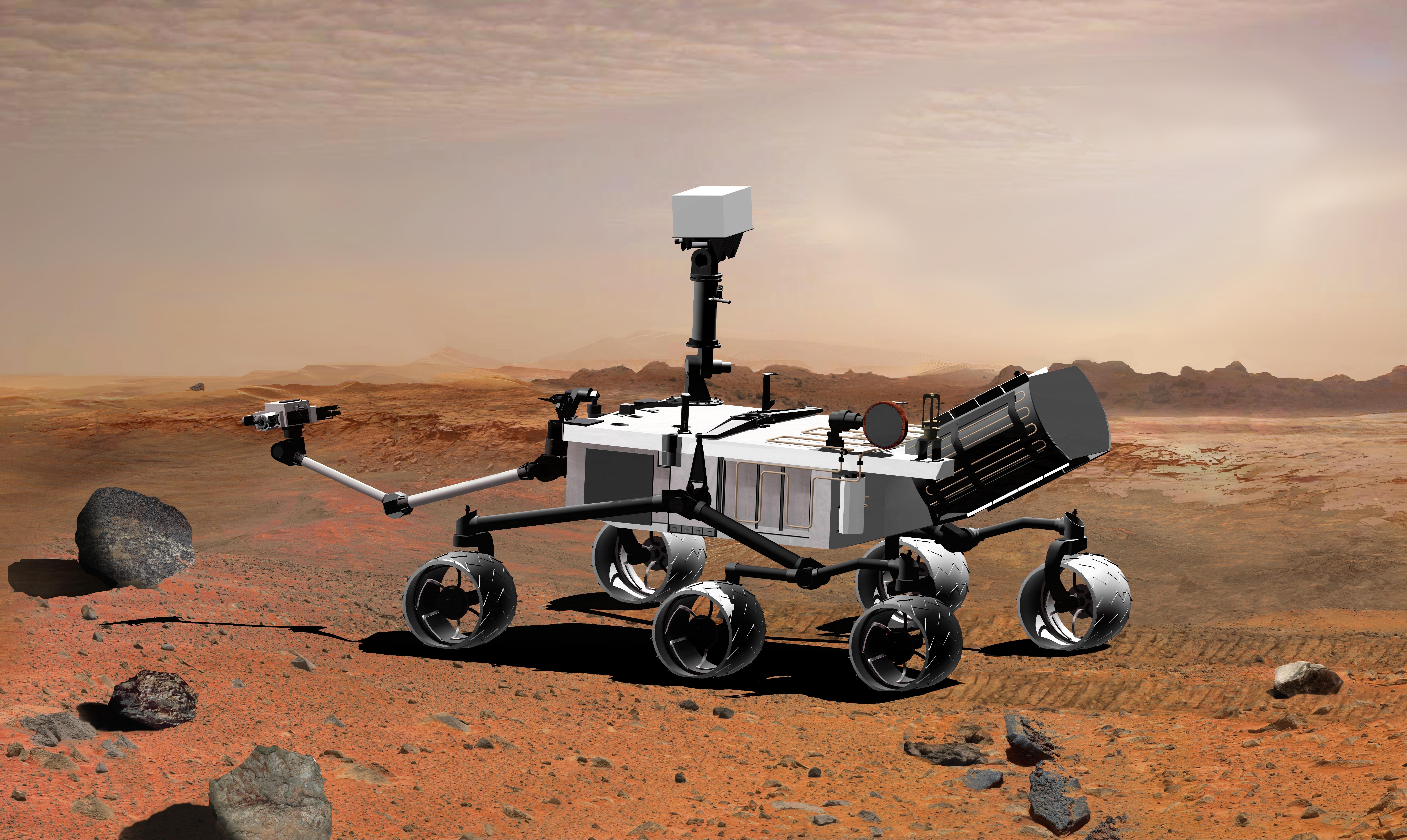
Mars Science Laboratory 
Conceptualización artística del vehículo MSLOrganización NASA Contratistas Boeing, Lockheed Martin Tipo de misión Vehículo explorador tipo rover. Lanzamiento 25 de noviembre - 18 de diciembre, 2011 Cohete Atlas V 541 Reingreso Agosto de 2012[1] [2] Duración 1 año marciano (1,88 años terrestres) Masa 900 kg Energía Generador Térmico de Isótopos (RTG) Web Sitio de la NASA para la misión MSL La Mars Science Laboratory (abreviada MSL), conocida como Curiosity,[3] [4] del inglés Curiosidad, es una misión espacial que incluye un astromóvil de exploración marciana dirigida por la NASA. Programada en un principio para ser lanzada el 8 de octubre de 2009 y efectuar un aterrizaje de precisión sobre la superficie del planeta en 2010 entre los meses de julio y septiembre, fue posteriormente pospuesta y no será lanzada hasta el otoño de 2011.[5] La misión se centra en colocar sobre la superficie marciana un vehículo explorador de tipo rover. Éste vehículo será tres veces más pesado y dos veces más grande que los vehículos utilizados en la misión Mars Exploration Rover, que aterrizaron sobre Marte en el año 2004. Portará con él los intrumentos científicos más avanzados que ninguna otra misión dirigida a Marte. La comunidad internacional proporcionará algunos de éstos instrumentos. Se tiene planeado lanzarlo a través de un cohete Atlas V 541. Una vez aterrizado, el rover tomará docenas de muestras de suelo y polvo rocoso marciano para su análisis. La duración de la misión será de 1 año marciano (1,88 años terrestres). Con un rango de exploración superior a los enviados anteriormente, investigará la capacidad pasada y presente de Marte para alojar vida.
Contenido
Objetivos
El MSL tiene cuatro objetivos: Determinar si existió vida alguna vez en marte, caracterizar el clima de marte, determinar su geologia y prepararse para la exploración humana de Marte. Para contribuir a estos cuatro objetivos científicos y conocer el objetivo principal(establecer la habitabilidad de marte) el MSL tiene ocho cometidos:
Evaluación de los procesos biológicos:
- Determinar la naturaleza y clasificación de los componentes orgánicos del carbono.
- Hacer un inventorio de los principales componentes que permiten la vida: carbono, hidrógeno, nitrógeno, oxígeno, fósforo y azufre.
- Identificar las características que representan los efectos de los procesos biológicos.
Objetivos geológicos y geoquímicos.
- Investigar la composición química, isotópica y mineral de la superficie marciana.
- Interpretar el proceso de formación y erosión de las rocas y del suelo.
Evaluación de los procesos planetarios.
- Evaluar la escala de tiempo de los procesos de evolución atmosféricos.
- Determinar el estado presente, los ciclos y distribución del agua y del dióxido de carbono.
Evaluación de la radiación en superficie.
- Caracterizar el espectro de radiación de la superficie, incluyendo Radiación cósmica, erupciones solares y neutrones secundarios.
Especificaciones
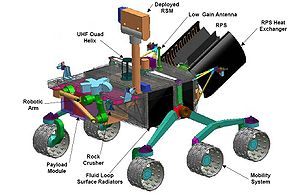 Diagrama esquemático del rover con sus componentes planeados.
Diagrama esquemático del rover con sus componentes planeados.
Se espera que el vehículo rover tenga un peso de 930 kilogramos incluyendo 80 kilogramos en instrumentos y equipo de análisis científico, en comparación a los usados en la Mars Exploration Rovers cuyo peso es de 185 kg incluyendo 5 kg de equipo en instrumental científico. Con una longitud de 2,7 m la misión MLS será capaz de superar obstáculos de una altura de 75 cm y la velocidad máxima de desplazamiento sobre terreno está estimada en 90 metros/hora con navegación automática, sin embargo se espera que la velocidad promedio de desplazamiento sea de 30 metros/hora considerando varibles como dificultad del terreno, deslizamiento y visibilidad. Las expectativas contemplan que el vehículo recorra un mínimo de 19 km durante dos años terrestres
Fuente de energía
El Mars Science Laboratory utilizará un "Generador termoeléctrico de radioisótopos" (RTG) fabricado por Boeing; este generador consiste en una cápsula que contiene radioisótopos de plutonio-238 y el calor generado por éste es convertido en electricidad por medio de un termopar,[6] produciendo así 2.5 kilovatios-hora por día.[7] Aunque la misión está programada para durar aproximadamente 2 años, el generador RTG tendrá una vida mínima de 14 años.
Carga útil de instrumentos propuesta
Actualmente se han elegido 12 instrumentos para el desarrollo de la misión:
Todas las cámaras han sido desarrolladas por Malin Space Science Systems; todas comparten un diseño común en cuanto a componentes tales como dispositivos para el procesamiento instantáneo de imágenes, y sensores CCD de 1600 X 1200
- MastCam: Éste sistema proporciona imágenes en múltiples espectros y en color real a través de cámaras con visión estereoscópica (tridimensional). Las tomas en color real son de 1200 x 1200 pixeles y a una velocidad de 10 cuadros por segundo, en un formato de video de alta definición de 1280 x 720. En contraste con la cámara panorámica usada en la misión MER la cual sólo puede generar imágenes de 1024 x 1024 en blanco y negro. La rueda con los filtros, diseñada para la toma de imágenes en distintos espectros, usada en la misión MER, también será utilizada en la MastCam. Ambas cámaras están dotadas de zoom automático y pueden enfocar objetos tan lejanos a una distancia de 1 km con una resolución de 10cm por pixel.
- Mars Hand Lens Imager (MAHLI): Éste sistema consiste en una cámara montada en un brazo robótico del rover, y se usará para obtener tomas microscópicas de las rocas y suelo marciano, del mismo modo que el MI usado en la MER, aunque a diferencia de éste, será capaz de tomar imágenes en color verdadero de 1600 x 1200 pixeles y con una resolución de 12.5 micrómetros por pixel. MAHLI tiene iluminación a base de Leds en luz blanca y ultravioleta para la toma de imágenes en la oscuridad o fluorescentes. MAHLI tiene enfoque mecánico en un rango de infinito a distancias milimétricas.
- MSL Mars Descent Imager (MARDI): Durante el descenso a la superficie marciana MARDI será capaz de lograr tomas de imágenes en color de 1600 x 1200 pixeles comenzando a una distancia de 3.7 kilómetros hasta los 5 metros de altura respecto del suelo. El manejo de imágenes a través de MARDI permitirá hacer un mapeo del terreno circundante y del sitio de aterrizaje. El 16 de septiembre del 2007 la NASA anunció que MARDI no sería incluido en la misión debido a problemas de fondos económicos.[8] MARDI fue subsecuentemente reafirmado después de que la Malin Space Science Systems, aceptó que no habría costos adicionales a la NASA para su inclusión.[9] MARDI tomará imágenes a razón de 5 cuadros por segundo durante cerca de 2 minutos, durante el descenso.[10]
- Hazard Avoidance Cameras (Hazcams): En el MSL se utilizarán cuatro pares de cámaras de navegación en blanco y negro situadas en la parte delantera, izquierda, derecha y trasera del vehículo. Las Cámaras de evasión de riesgos (también llamado Hazcams) se utilizan para la prevención de riesgos en las unidades del Rover y para la colocación segura del brazo robótico en las rocas y en los suelos. Las cámaras se utilizan para captar la luz visible en tres dimensiones (3-D) de las imágenes. Las cámaras tienen unos 120 grados de campo de visión y un mapa del terreno de hasta 10 pies (3 metros) en frente del vehículo.Estas imágenes de salvaguardias sirven para que el vehículo choque kinadvertidamente contra obstáculos inesperados, y trabaja en conjunto con el software que permite que el rover se desplace con seguridad.
- Navigation Cameras (Navcams): El MSL utiliza dos pares de cámaras de navegación en blanco y negro montadas sobre el mástil de apoyo para la navegación del suelo. Las cámaras se utilizan para captar la luz visible en tres dimensiones (3-D) de imágenes. Las cámaras tienen unos 45 grados de campo de visión.
Espectrómetros
- ChemCam: ChemCam es un sistema de espectroscopía de colapso inducida por rayo láser (LIBS -siglas en inglés), el cual puede apuntar a una roca a una distancia de 13 metros, vaporizando una pequeña cantidad de los minerales subyacientes en ella y recogiendo el espectro de luz emitida por la roca vaporizada usando una cámara con una resolución angular de 80 microradianes. Está siendo desarrollada por el Laboratorio Nacional de Los Álamos y el laboratorio francés CESR (a cargo del rayo láser). Utiliza un rayo laser infrarrojo con una longitud de onda de 1067 nanómetros y un pulso de 5 nanosegundos, que enfocará en un punto de 1 GW/cm2, depositando 30mJ de energía. La detección se logrará entre los 240 y los 800 nanómetros.[11] [12] [13] En octubre del 2007 la NASA anunció que se detenía el desarrollo del dispositivo debido a que el costo había llegado a un 70% del costo proyectado y se terminaría solo con el dinero ya proporcionado.[14] El Laboratorio Nacional de Los Álamos afirmó que el sobrecosto se debió a los requerimientos impuestos por la misión del rover y el ahorro en costos era mínimo debido a que el dinero provenía de la CNES francesa.[15]
- Espectrómetro de rayos X por radiación alfa (APXS): Este dispositivo irradiará muestras con partículas alfa y permitirá su análisis a partir del espectro generado por los Rayos X re-emitidos. Está siendo desarrollado por La Agencia Espacial Canadiense, para determinar la composición elemental de muestras. El sistema APXS es una forma de PIXE. Instrumentos similares fueron incluidos en la misión Mars Pathfinder y en la Mars Exploration Rovers[16]
- CheMin: Chemin es la abreviación usada para el Instrumento de análisis químico y minerológico a través de la difracción y fluorescencia de Rayos X, el cual cuantifica y analiza la estructura de los minerales contenidos en una muestra. Es desarrollado por el Doctor David Blake en el NASA Ames Research Center y el NASA Jet Propulsion Laboratory[17]
- Análisis de muestras en Marte (SAM): El instrumento así denominado, analizará muestras sólidas y gaseosas en búsqueda de compuestos orgánicos. Está siendo desarrollado por el Centro de vuelo espacial Goddard de la NASA y el Laboratoire Inter-Universitaire des Systèmes Atmosphériques (LISA) -Laboratorio Inter-Universitario de Sistemas Atmosféricos-. SAM consiste en un sistema de manipulación de muestras con 74 copas las cuales pueden ser calentadas a una temperatura de 1000 °C para enriquecer y derivar moléculas orgánicas de la muestra misma. El espectrómetro de cromatografía de gases es un espectrómetro cuadripolar con una rango de masa Dalton de 2-235 el cual obtiene información a través de las seis columnas cromatográficas de gases. El espectrómetro laser ajustable es capaz de medir radios de isotopos de carbono y oxígeno en CO2
Detectores de radiación
- Detector por evaluación de radiación (RAD): Este instrumento analizará toda la gama e intensidad de radiación espacial y radiación solar que recibe la superficie de Marte, con el objetivo de diseñar protección contra la radiación para exploradores humanos. Este instrumento está financeado por la NASA y desarrollado por la universidad Southwest Research Institute (SwRI) en EE.UU. y la universidad alemana 'Christian-Albrechts-Universität zu Kiel.'
- Albedo dinámico de Neutrones (DAN): DAN es una fuente pulsante de neutrones la cual será utilizada para medir la concentración de hidrógeno o agua bajo la superficie cercana. Este instrumento es proporcionado por la Agencia Espacial Federal Rusa.
Sensores medioambientales
- Estación de monitoreo ambiental Rover (REMS): Esta es una estación meteorológica que medirá la presión atmosférica, humedad, dirección y fuerza del viento, así como temperatura ambiental y niveles de radiación ultravioleta. El desarrollo del equipo ha sido liderado por el Centro de Astrobiología con el apoyo del Centro para el Desarrollo Tecnológico Industrial y el Ministerio de Educación y Ciencia, el Ministerio de Defensa a través del Instituto Nacional de Técnica Aeroespacial de España y con la colaboración de Finnish Metereological Institute
Instrumentación para el ingreso, descenso y aterrizaje (MEDLI)
El objetivo del módulo MEDLI es medir la densidad de la atmósfera exterior, así como la temperatura y función del escudo térmico de la sonda durante su ingreso a la atmósfera marciana. Los datos obtenidos serán utilizados para entender y describir mejor la atmósfera marciana y ajustar los márgenes de diseño y procedimientos de entrada requeridos para las sondas futuras.
Sistema de aterrizaje
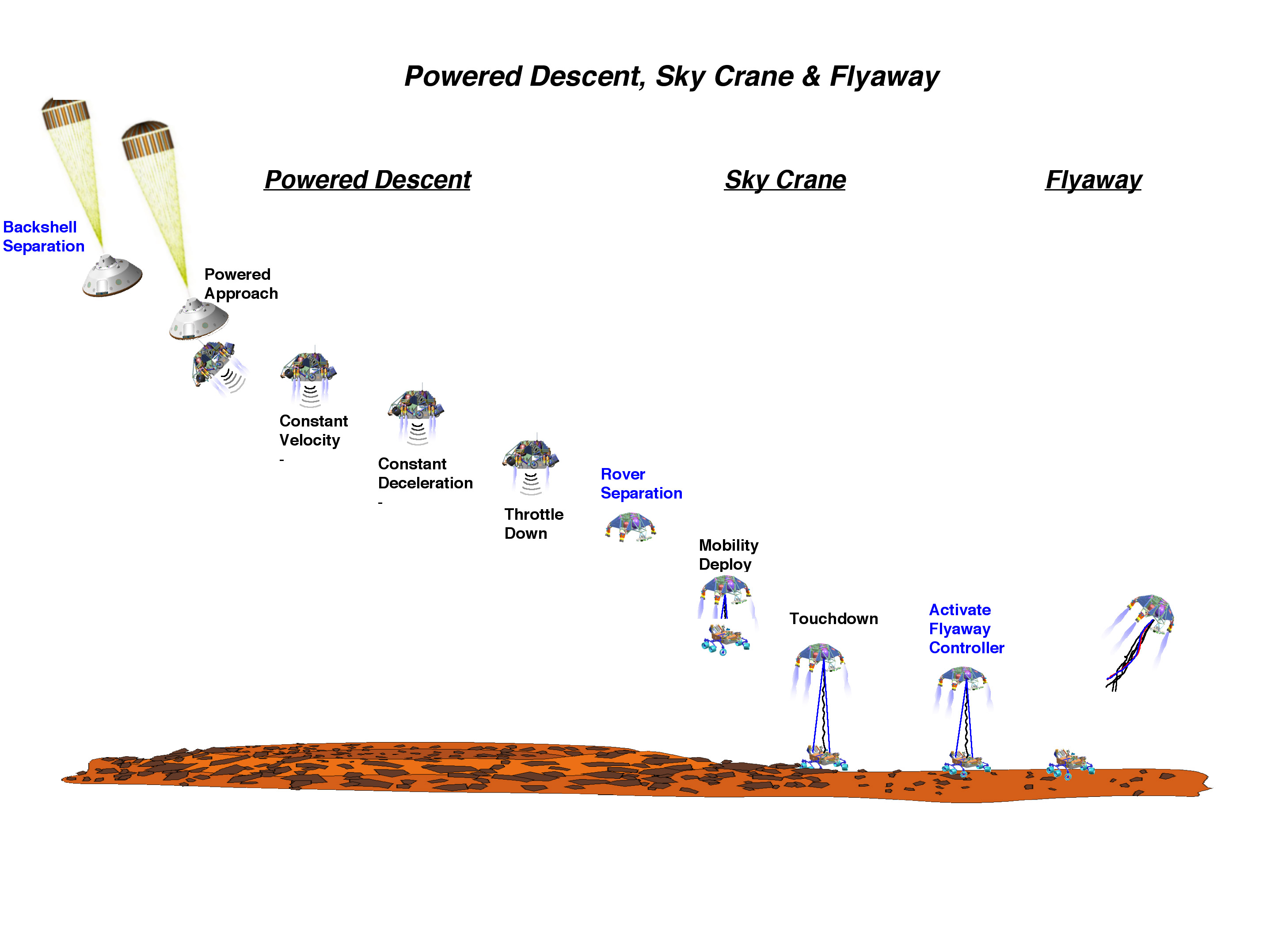
 Etapas del ingreso, descenso y aterrizaje del MSL.
Etapas del ingreso, descenso y aterrizaje del MSL.Sitios de aterrizaje propuestos
- Delts Eberswalde (24°S, 327°E)
- Cráter Holden (26.4°S, 325.3°E)
- Cráter Gale (4.6°S, 137.2°E)
- Mawrth Vallis (24°N, 341°E)
- Nili Vallis (21°N, 74°E)
- Cráter Miyamoto (2.9°S, 7°W)
- South Meridiani Planum (3.0°S, 5.4°W)
Referencias
- ↑ http://www.nasa.gov/mission_pages/msl/msl20100723-b.html
- ↑ http://alt1040.com/2011/04/como-seria-la-llegada-de-curiosity-a-marte%7C
- ↑ «Name NASA's Next Mars Rover». NASA/JPL (27-05-2009). Consultado el 27-05-2009.
- ↑ «NASA Selects Student's Entry as New Mars Rover Name». NASA/JPL (27-05-2009). Consultado el 27-05-2009.
- ↑ «Sondas Espaciales - La próxima misión de la NASA a Marte se atrasa al 2011».
- ↑ «Technologies of Broad Benefit: Power». Consultado el 17-11-2008.
- ↑ Troubles parallel ambitions in NASA Mars project. USA Today. 14-04-2008. http://www.usatoday.com/tech/science/space/2008-04-13-mars_N.htm. Consultado el 22-09-2008.
- ↑ «NASA Memorándum a la Comunidad Científica Espacial : El proyecto Mars Science Laboratory, cambia en respuesta al incremento en sus costos, El programa Marte se mantiene en espera (en inglés)». SpaceRef Interactive.
- ↑ «Mars Science Laboratory Instrumentation. Anuncio de Alan Stern y Jim Green, desde las oficinas centrales de la NASA (en inglés)». SpaceRef Interactive.
- ↑ «Mars Descent Imager (MARDI) Actualización». Malin Space Science Systems (12 de noviembre, 2007).
- ↑ Salle B., Lacour J. L., Mauchien P., Fichet P., Maurice S., Manhes G. (2006). «Estudio comparativo de diferentes metodologías para el análisis cuantitativo en rocas a traves de la espectroscopía de colapso inducido por rayo laser dentro de una atmósfera marciana simulada (en inglés)». Spectrochimica Acta Part B-Atomic Spectroscopy 61 (3): pp. 301-313. doi:. http://www.lpi.usra.edu/meetings/lpsc2005/pdf/1580.pdf.
- ↑ CESR presentación en el LIBS
- ↑ Hoja técnica de la ChemCam
- ↑ NASA Caps Funding for Mars Rover Sensor
- ↑ Status de la ChemCam octubre de 2007
- ↑ R. Rieder, R. Gellert, J. Brückner, G. Klingelhöfer, G. Dreibus, A. Yen, S. W. Squyres (2003). «The new Athena alpha particle X-ray spectrometer for the Mars Exploration Rovers». J. Geophysical Research 108: pp. 8066. doi:.
- ↑ Sarrazin P., Blake D., Feldman S., Chipera S., Vaniman D., Bish D. (2005). «Field deployment of a portable X-ray diffraction/X-ray flourescence instrument on Mars analog terrain». Powder Diffraction 20 (2): pp. 128-133. doi:.
Véase también
Enlaces externos
 Wikimedia Commons alberga contenido multimedia sobre Mars Science Laboratory. Commons
Wikimedia Commons alberga contenido multimedia sobre Mars Science Laboratory. Commons- Sitio de la misión MSL
- Perfil de la misión Mars Science Laboratory porExploración del Sistema Solar de la NASA
- Malin Space Science Systems
- JPL's Mars Technology Program site
- Mars Science Laboratory Acquisition Program
- Spacecraft: Surface Operations Configuration: Science Instruments: ChemCam
- Breve descripción del sistema EDL (PDF)
- Próximo a Marte (Bruce Moomaw, Space Daily, March 9, 2005): Un repaso extenso de los planes de la NASA para explorar Marte con muchos detalles del Mars Science Laboratory
- nuclearspace.com observación del MSL
- MSL EDL Video localizado en YouTube
- Demo del mobility system reportado por la Sociedad Planetaria.
Categorías:- Misiones espaciales del futuro
- Programa espacial de Estados Unidos
- Sondas espaciales de Marte

Wikimedia foundation. 2010.