- Cálculo tensorial
-
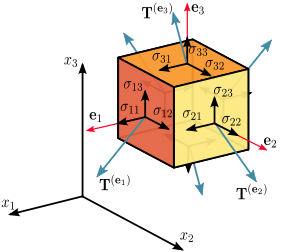 Un tensor de segundo orden, en tres dimensiones.
Un tensor de segundo orden, en tres dimensiones.
En matemáticas y en física, un tensor es cierta clase de entidad algebraica de varias componentes, que generaliza los conceptos de escalar, vector y matriz de una manera que sea independiente de cualquier sistema de coordenadas elegido. En adelante utilizaremos el convenio de sumación de Einstein.
Una vez elegida una base vectorial, las componentes de un tensor en una base vendrán dadas por una multimatriz. El orden de un tensor será el número de índices necesario para especificar sin ambigüedad una componente de un tensor: un escalar será considerado como un tensor de orden 0; un vector, un tensor de orden 1; y dada una base vectorial, los tensores de segundo orden pueden ser representados por una matriz.
Contenido
Historia
La palabra "tensor" se utiliza a menudo como abreviatura de campo tensorial, que es un valor tensorial definido en cada punto en una variedad (matemática). El primero en utilizar esta palabra fue William Rowan Hamilton en 1846, empleándola para lo que actualmente se conoce como módulo y fue Woldemar Voigt en 1899 quien la empleo en su acepción actual. La palabra tensor proviene del latín tensus, participio pasado de tendere 'estirar, extender'. El nombre se extendió porque la teoría de la elasticidad fue una de las primeras aplicaciones físicas donde se usaron tensores.
Gregorio Ricci-Curbastro en 1890 desarrollo la notación actual con el nombre de geometría diferencial absoluta, y se popularizó con la publicación de Cálculo Diferencial Absoluto de Tullio Levi-Civita en 1900. Con la introducción de la teoría de la relatividad general por parte de Albert Einstein alrededor de 1915 se encontró su aplicación más pragmática. La Relatividad General es netamente tensorial. Einstein había aprendido del mismo Levi-Civita el uso de tensores con gran dificultad.
Características y uso
Las cantidades geométricas y físicas pueden ser categorizadas considerando los grados de libertad inherentes a su descripción. Las cantidades escalares son las que se pueden representar por un solo número, por ejemplo masa y temperatura. Hay también cantidades tipo vector, por ejemplo fuerza, que requieren una lista de números para su descripción. Finalmente, las cantidades tales como formas cuadráticas requieren naturalmente una matriz con índices múltiples para su representación. Estas últimas cantidades se pueden concebir solamente como tensores.
Realmente, la noción tensorial es absolutamente general. Los escalares y los vectores son casos particulares de tensores. La propiedad que distingue un escalar de un vector, y distingue ambos de una cantidad tensorial más general es el número de índices en la matriz de la representación. Este número se llama rango de un tensor. Así, los escalares son los tensores de rango cero (sin índices), y los vectores son los tensores de rango uno.
Uso de tensores
No todas las relaciones en la naturaleza son lineales, pero la mayoría es diferenciable y así se pueden aproximar localmente con sumas de funciones multilineales. Así la mayoría de las magnitudes en física se pueden expresar como tensores.
Un ejemplo simple es la descripción de una fuerza aplicada al movimiento de una nave en el agua. La fuerza es un vector, y la nave responderá con una aceleración, que es también un vector. La aceleración en general no estará en la misma dirección que la fuerza, debido a la forma particular del cuerpo de la nave. Sin embargo, resulta que la relación entre la fuerza y la aceleración es lineal. Tal relación es descrita por un tensor del tipo (1, 1), es decir, que transforma un vector en otro vector. El tensor se puede representar como una matriz que cuando es multiplicada por un vector, dé lugar a otro vector. Así como los números que representan un vector cambiarán si uno cambia el conjunto de coordenadas, los números en la matriz que representa el tensor también cambiarán cuando se cambie el conjunto de coordenadas.
En la ingeniería, las tensiones en el interior de un sólido rígido o líquido también son descritas por un tensor. Si un elemento superficial particular dentro del material se selecciona, el material en un lado de la superficie aplicará una fuerza en el otro lado. En general, esta fuerza no será ortogonal a la superficie, sino que dependerá de la orientación de la superficie de una manera lineal. Esto es descrito por un tensor del tipo (2, 0), o más exactamente por un campo tensorial del tipo (2, 0) puesto que las tensiones pueden cambiar punto a punto.
Algunos ejemplos bien conocidos de tensores en geometría son las formas cuadráticas, y el tensor de curvatura. Algunos ejemplos de tensores físicos son el tensor de energía-momento, el tensor de polarización y el tensor dieléctrico.
Conceptos básicos
En un sentido práctico un tensor es objeto matemático representado por un cierto conjunto de componentes. Para definir un tensor es necesario partir de un espacio físico o variedad diferenciable que define cual es el espacio vectorial base V sobre el que se construirán tensores de diferente tipo y orden. En mecánica clásica por ejemplo el espacio es
 , aunque en la teoría de la relatividad especial el espacio base es isomorfo a
, aunque en la teoría de la relatividad especial el espacio base es isomorfo a  y en la teoría general de la relatividad es el espacio tangente a una variedad lorentziana de cuatro dimensiones. En matemática lo más usual es construir la teoría sobre una variedad riemanniana o variedad pseudoriemanniana n-dimensional.
y en la teoría general de la relatividad es el espacio tangente a una variedad lorentziana de cuatro dimensiones. En matemática lo más usual es construir la teoría sobre una variedad riemanniana o variedad pseudoriemanniana n-dimensional.Tratamiento clásico de los tensores
El enfoque clásico visualiza los tensores como "matrices" de orden superior que son generalizaciones n-dimensionales de los escalares, vectores de 1 dimensión y matrices de 2 dimensiones. En este enfoque los números reales que aparecen en dichas "matrices" son las componentes del tensor en una base concreta. Si bien para los casos prácticos este modo de representación puede ser muy intuitivo dificulta la manipulación formal para otros fines menos prácticos.
Los "componentes" tensoriales son los índices del arreglo. Esta idea puede ser generalizada aún más a los campos tensoriales, donde los elementos del tensor son funciones, o aún diferenciales. La teoría del campo tensorial se puede ver, grosso modo, en este enfoque, como otra extensión de la idea del jacobiano.
Enfoque moderno
El enfoque moderno visualiza los tensores inicialmente como objetos abstractos, construidos sobre espacios vectoriales abstractos, en los que se define un producto tensorial que permite construir estructuras típicas del álgebra multilineal. Sus propiedades bien conocidas se pueden derivar de sus definiciones, como funciones lineales o aún más generales; y las reglas para las manipulaciones de tensores se presentan como extensión del álgebra lineal al álgebra multilineal.
Este tratamiento ha sustituido en gran parte el tratamiento basado en componentes para el estudio avanzado, a la manera en que el tratamiento libre de componentes más moderno de vectores substituye el tratamiento basado en componentes tradicional aunque el tratamiento basado en componentes se haya utilizado para proporcionar una motivación elemental para el concepto de un vector. Se podría decir que el lema es 'tensores son elementos de un cierto espacio tensorial'.
El enfoque moderno está más estrechamente asociado al tratamiento que los matemáticos han hecho del cálculo tensorial en el que las notaciones generalmente representan el objeto tensorial y secundariamente las componentes. Esto contrasta con el tratamiento clásico de los tensores en las ciencias físicas y la ingeniería que suele representar los tensores mediante sus componentes y enfatiza mucho las propiedades asociadas a la transformación de coordenadas al pasar de un sistema de referencia a otro, o cuando se cambian las coordenadas.
Definición de tensor
Hay varias maneras de definir un tensor, que resultan en enfoques equivalentes:
- la manera clásica, forma usual en física de definir los tensores, en términos de objetos cuyos componentes se transforman bajo cambios de coordenadas según ciertas reglas, introduciendo la idea de transformaciones covariantes o contravariantes.
- la manera usual de la matemática, que implica definir ciertos espacios vectoriales definidos a partir de un espacio vectorial dado, sin fijar cualesquiera conjuntos de coordenadas hasta que las bases se introduzcan por necesidad. Existen dos definiciones de este tipo:
- La de tensores como aplicaciones multilineales, que nos obliga a usar el dual de un espacio vectorial.
- La que usa una operación definida axiomáticamente llamada producto tensorial de espacios vectoriales.
Definición clásica
Los físicos e ingenieros especialmente en tratamientos informales de los tensores consideran que un tensor es simplemente una magnitud física multi-índice dada por un conjunto de números reales o "componentes" del tensor que se transforman de "manera adecuada". Es decir, si en un determindo sistema de referencia
 una magnitud tensorial está dada por un conjunto de componentes
una magnitud tensorial está dada por un conjunto de componentes  al cambiar a un sistema de referencia diferente
al cambiar a un sistema de referencia diferente  tendrá componentes con valores numéricos diferentes
tendrá componentes con valores numéricos diferentes  siendo la relación entre las componentes de la magnitud en uno y otro sistema de referencia la siguiente:
siendo la relación entre las componentes de la magnitud en uno y otro sistema de referencia la siguiente:
donde en la última expresión se ha usado la convenio de sumación de Einstein y además:
 es la matriz del cambio de base de coordenadas
es la matriz del cambio de base de coordenadas es la matriz del cambio de base inverso, que es la matriz traspuesta de la anterior.
es la matriz del cambio de base inverso, que es la matriz traspuesta de la anterior.
Las magnitudes escalares de la física en general son tensores de orden cero, y varios de los tensores físicos importantes (tensor de inercia, tensor de tensiones, etc..) son tensores de segundo orden.
Como aplicación multilineal
Dado un espacio vectorial V de dimensión n sobre un cuerpo K, recordemos que su espacio dual V * es el conjunto de todas las aplicaciones lineales
 . El espacio dual es un espacio vectorial de la misma dimensión que V. Nos referiremos normalmente a los elementos de V y de V * como vectores y covectores, respectivamente.
. El espacio dual es un espacio vectorial de la misma dimensión que V. Nos referiremos normalmente a los elementos de V y de V * como vectores y covectores, respectivamente.Un tensor es una aplicación multilineal, es decir, una aplicación lineal en cada uno de sus argumentos, de la forma:
De este modo, un tensor T asocia cada r covectores
 y s vectores
y s vectores  , un escalar
, un escalarLlamamos tipo del tensor al par (r,s).
Usando producto tensorial de espacios vectoriales
En el enfoque más matemático del cálculo tensorial se considera un espacio vectorial V y se considera su espacio dual V*. Si
 es una base del espacio vectorial V y
es una base del espacio vectorial V y  la correspondiente base dual de V*, se construye el espacio vectorial producto de r copias de V y s copias de V*, es decir,
la correspondiente base dual de V*, se construye el espacio vectorial producto de r copias de V y s copias de V*, es decir,  o producto tensorial de espacios vectoriales. Un tensor es un elemento de dicho espacio vectorial:
o producto tensorial de espacios vectoriales. Un tensor es un elemento de dicho espacio vectorial:
Las propiedades de transformación de los tensores se siguen de las propiedades de transformación de los vectores de la base de manera trivial.
Ejemplos de tensores de distinto orden
A los tensores se los puede clasificar por su orden, es decir el número de arreglos que requiere para ser descrito. En general, si n es la dimensión del tensor (dimensión del espacio vectorial sobre el que se construye) y r+s el orden, un tensor requiere de
 componentes para ser descrito.
componentes para ser descrito.Tensores de orden cero: escalares
Como se dijo anteriormente, un escalar es una cantidad que requiere solo un número real en cualquier sistema de coordenadas para ser descrito. Es decir es invariante ante cualquier cambio de coordenadas en cualquier sistema. De esta manera si
 es un escalar en un sistema de coordenadas y
es un escalar en un sistema de coordenadas y  es el mismo escalar en otro sistema de coordenadas entonces
es el mismo escalar en otro sistema de coordenadas entonces  Un escalar es un Tensor de Orden cero porque requiere un solo número para ser descrito:
Un escalar es un Tensor de Orden cero porque requiere un solo número para ser descrito:  .
.Tensores de orden uno: vectores y covectores
De forma general, un vector requiere n componentes para ser descrito. En un espacio tridimensional, un vector es descrito por tres componentes. La transformación de coordenadas de un vector de un espacio a otro se lo realiza por medio de una transformación lineal. De esta manera, un vector es un tensor de orden uno porque requiere un arreglo de n números para ser especificado.
Si tenemos un vector expresado por sus componentes
 en un sistema y
en un sistema y  en otro sistema, la transformación de coordenadas para que el vector se mantenga invariante se puede expresar:
en otro sistema, la transformación de coordenadas para que el vector se mantenga invariante se puede expresar:donde
 es el coseno del ángulo entre el i-ésimo eje de coordenadas y el k-ésimo.
es el coseno del ángulo entre el i-ésimo eje de coordenadas y el k-ésimo.Tensores de orden dos: matrices y formas cuadráticas
Siguiendo la misma lógica, el siguiente elemento es el que requiere nxn coomponentes para ser descrito. Se denomina tensor de orden dos al objeto, normalmente representado por una matriz nxn, que representado en un sistema de coordenadas como
 su transformación invariante en otro sistema con componentes
su transformación invariante en otro sistema con componentes  es:
es:donde
 es el coseno del ángulo entre el i-ésimo eje de un sistema con el l-ésimo eje del otro sistema.
es el coseno del ángulo entre el i-ésimo eje de un sistema con el l-ésimo eje del otro sistema.Tensores de orden N
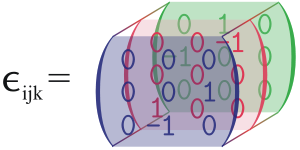 Representación del Tensor de Levi-Civita, tensor de Orden tres.
Representación del Tensor de Levi-Civita, tensor de Orden tres.Finalmente la generalización de los tipos anteriores viene dado por un elemento de
 coordenadas para ser especificado. Como generalización de las transformaciones anteriores tenemos:
coordenadas para ser especificado. Como generalización de las transformaciones anteriores tenemos:donde
 son las componentes del tensor en un sistema de coordenadas,
son las componentes del tensor en un sistema de coordenadas,  son las componentes del mismo tensor en otros coordenadas y los
son las componentes del mismo tensor en otros coordenadas y los  son los cosenos de los ángulos entre los i1-ésimos ejes del un sistema y los k1-ésimos en el otro sistema.
son los cosenos de los ángulos entre los i1-ésimos ejes del un sistema y los k1-ésimos en el otro sistema.Notación y nomenclatura
Covarianza y contravarianza
El concepto de covarianza y contravarianza esta arraigado en la descripción de un elemento en dos sistemas de coordenadas. Para simplificar su descripción se puede tomar a un vector en un espacio tridimensional. La posición de un punto arbitrario en este espacio puede ser expresado en términos de tres coordenadas
 y si r(u1,u2,u3) es el vector posición de ese punto entonces en P existen dos conjuntos de vectores base:
y si r(u1,u2,u3) es el vector posición de ese punto entonces en P existen dos conjuntos de vectores base: y
y  donde
donde 
En general, estos vectores no son unitarios ni forman una base ortogonal. Sin embargo los conjuntos
 y
y  son sistemas reciprocos de vectores y por eso:
son sistemas reciprocos de vectores y por eso:En el cálculo tensorial es usual denotar al conjunto de vectores base
como  , el cual lo diferencia de la base . Con esta notación, la relación de reciprocidad anterior sería:
, el cual lo diferencia de la base . Con esta notación, la relación de reciprocidad anterior sería:donde
 es la delta de Kronecker.
es la delta de Kronecker.Así, dados dos bases
y se puede escribir un vector general  en términos de estas bases:
en términos de estas bases:Los
 se los llama componentes contravariantes del vector y los
se los llama componentes contravariantes del vector y los  se los llama componentes covariantes. De igual manera, se los llama base contravariante y se los llama base covariante.
se los llama componentes covariantes. De igual manera, se los llama base contravariante y se los llama base covariante.Convenio de sumación de Einstein
Existe una convención para escribir tensores, conocida como convenio de sumación de Einstein. En esta notación todo subíndice que aparece dos veces en cualquier término de una expresión indica que éstos deben ser sumados sobre todos los valores que ese indice toma. Por ejemplo, en un caso tridimensional:
 implica que
implica que 
 implica que
implica que 
Notación en cálculo en variedades
Otra notación ampliamente usada en el cálculo tensorial es la forma usada para los vectores de la base. Cuando se hace cálculo tensorial en una variedad diferencial o superficie curva, el espacio básico que sirve para definir las magnitudes es el espacio tangente a dicha variedad en cada punto. Cuando se emplean coordenadas curvilíneas
 , dada la relación isomórfica que existe entre derivaciones sobre la variedad y el conjunto de elementos del espacio tangente, se puede construir una base del espacio vectorial tantente formada por las derivadas direccionales según las direcciones dadas por las coordenadas, así una base vectorial del espacio tangente en cada punto p viene dada por:
, dada la relación isomórfica que existe entre derivaciones sobre la variedad y el conjunto de elementos del espacio tangente, se puede construir una base del espacio vectorial tantente formada por las derivadas direccionales según las direcciones dadas por las coordenadas, así una base vectorial del espacio tangente en cada punto p viene dada por:
Por otra parte la base del espacio cotangente, que es el espacio dual del espacio tangente se puede expresar mediante la diferencial exterior de las coordenadas consideradas como funciones reales sobre la variedad:

Álgebra de Tensores
Debido a que las operaciones de los tensores de orden cero (escalares), uno (vectores) y dos (matrices) son conocidas, para los tensores se espera que solo se generalicen algunas operaciones. En conjunto de todos los tensores p-veces contravariantes y q-covariantes definidos sobre el espacio vectorial V se denota como
 (algunos autores usan la notación inversa
(algunos autores usan la notación inversa  ) forman un espacio vectorial
) forman un espacio vectorial  con la suma y la resta definidas como, ya que la suma está bien definida para tensores de los mismos órdenes
con la suma y la resta definidas como, ya que la suma está bien definida para tensores de los mismos órdenes  y
y  , así su suma y resta estaría dada por:
, así su suma y resta estaría dada por:Este espacio vectorial es de dimensión
 donde
donde  es la dimensión del espacio vectorial V.
es la dimensión del espacio vectorial V.Otro conjunto de operaciones importantes tienen que ver con el cambio de orden de los índices de un tensor. Si
 son las componentes de un tensor, de la misma manera el conjunto formado por el intercambio de dos indices, es decir
son las componentes de un tensor, de la misma manera el conjunto formado por el intercambio de dos indices, es decir  , también lo es. En términos de esos intercambios de índices pueden identificarse subespacios vectoriales:
, también lo es. En términos de esos intercambios de índices pueden identificarse subespacios vectoriales:- Se dice que el tensor es simétrico si el intercambio de cualquier par de índices no altera el tensor:
 el conjunto de todos los tensores simétricos del espacio forma un subespacio del mismo denotado como
el conjunto de todos los tensores simétricos del espacio forma un subespacio del mismo denotado como 
- Se dice que el tensor es antisimétrico si el intercambio de cualquier par de índices altera el signo del tensor:
 el conjunto de todos los tensores antisimétricos de orden k de un espcio tensorial también forma un subespacio denotado como
el conjunto de todos los tensores antisimétricos de orden k de un espcio tensorial también forma un subespacio denotado como  es de dimensión
es de dimensión 
Por otra parte, un tensor arbitrario no es simétrico ni antisimétrico. Un tensor de orden 2 siempre puede expresarse como la suma de un tensor simétrico (
 ) y uno antisimétrico (
) y uno antisimétrico ( ):
): . Esto no es posible para tensores de orden superior a 2.
. Esto no es posible para tensores de orden superior a 2.
Operaciones con tensores
Producto tensorial y producto exterior
Dados dos tensores se puede definir entre ellos el llamado producto tensorial cuyo resultado es un tensor de tipo más complejo cuyas componentes pueden obtenerse a partir de los tensores originales.
El producto de dos tensores es un tensor cuyo rango es la suma de los rangos dados por los dos tensores. Este producto implica la multiplicación ordinaria de los componentes de un tensor y es llamado producto exterior.
Por ejemplo:
Subir y bajar índices
En una variedad riemanniana existe la posibilidad de definir una operación sobre tensores, que en general no puede realizarse en una variedad cualquiera. Esa operación permite substituir en los cálculos un tensor de tipo
 por otro de tipo
por otro de tipo  con tal que k + l = k' + l'. Esta operación se denomina usualmente ley de subir o bajar índices. Esa operación se basa en la existencia de un isomorfismos entre espacios de tensores covariantes y contravariantes definidos sobre una variedad riemanniana o pseudoriemanniana
con tal que k + l = k' + l'. Esta operación se denomina usualmente ley de subir o bajar índices. Esa operación se basa en la existencia de un isomorfismos entre espacios de tensores covariantes y contravariantes definidos sobre una variedad riemanniana o pseudoriemanniana  . Por tanto para emplear, la subida y bajada de índices es necesario usar el tensor métrico
. Por tanto para emplear, la subida y bajada de índices es necesario usar el tensor métrico  (y su inverso
(y su inverso  , llamado co-tensor métrico).
, llamado co-tensor métrico).Estas operaciones resultan muy útiles en la teoría general de la relatividad donde cualquier magnitud física puede ser representadas por tensores covariantes o contravariantes indistintamente, y sin alterar el significado físico, según las necesidades del problema planteado. Así para cualquier magnitud física representada por un tensor de tercer rango, puede ser representado por varios conjuntos de magnitudes relacionables gracias a la operación de "subir y bajar índices":
Contracción
La contracción de tensores es una operación que reduce el orden total de un tensor. Esta operación reduce un tensor tipo
 a otro tipo
a otro tipo  . En términos de componentes, esta operación se logra sumando el índice de un tensor contravariante y un covariante. Por ejemplo, un tensor (1,1)
. En términos de componentes, esta operación se logra sumando el índice de un tensor contravariante y un covariante. Por ejemplo, un tensor (1,1)  puede ser contraido a un escalar a través de
puede ser contraido a un escalar a través de  ; donde el convenio de sumación de Einstein es empleado. Cuando el tensor (1,1) se lo interpreta como un mapeo lineal, esta operación es conocida como la traza.
; donde el convenio de sumación de Einstein es empleado. Cuando el tensor (1,1) se lo interpreta como un mapeo lineal, esta operación es conocida como la traza.La contracción se utiliza usualmente con el producto tensorial para contraer el indice de cada tensor. La contracción puede también entenderse en términos de la definición de un tensor como un elemento de un producto tensorial de copias del espacio
 con el espacio
con el espacio  , descomponiendo primero el tensor en una combinación lineal de tensores más simples, y posteriormente aplicando un factor de a un factor de . Por ejemplo
, descomponiendo primero el tensor en una combinación lineal de tensores más simples, y posteriormente aplicando un factor de a un factor de . Por ejemplo
puede ser escrito como la combinación lineal de

La contracción de
 en el primero y último espacio es entonces el vector
en el primero y último espacio es entonces el vector
Producto Interno
El producto interno de dos tensores se produce al contraer el producto exterior de los tensores. Por ejemplo, dados dos tensores
 y
y  su producto externo es
su producto externo es  . Igualando índices,
. Igualando índices,  , se obtiene el producto interno:
, se obtiene el producto interno:  .
.Dual de Hodge
Cálculo tensorial en variedades
Tanto la geometría diferencial avanzada como la teoría general de la relatividad requieren el uso de tensores constriuidos sobre espacios vectoriales diferentes. Esto sucede porque tanto en las superficies curvas como en el espacio-tiempo curvo el espacio tangente de diferentes puntos no coincide y es necesario "conectarlos" o construir aplicaciones entre ellos de alguna manera. Una manera de hacer cálculo tensorial en esas situaciones es definir una conexión matemática que permita definir la derivación covariante. Además la estructura diferenciable permite construir la aplicación diferencial tangente que permite construir isomorfismo entre los diferentes espacios tangentes. El cálculo tensorial en esas situaciones se construye a partir de secciones sobre fibrados tangentes asociados a cada tipo de tensor.
Pushforward y Pullback
Dadas dos variedades diferenciables
 de dimensión m y
de dimensión m y  de dimensión n y una aplicación entre ellas
de dimensión n y una aplicación entre ellas  el concepto de aplicación diferencial tangente (o pushforward) es una aplicación lineal entre los fibrados tangentes de ambas variedades.
el concepto de aplicación diferencial tangente (o pushforward) es una aplicación lineal entre los fibrados tangentes de ambas variedades.Una aplicación entre variedades se dice diferenciable si dada una carta local
 que contenga al punto
que contenga al punto  y
y  que contenga a
que contenga a  , la aplicación
, la aplicación  es diferenciable como función de
es diferenciable como función de  a
a  .
.La aplicación lineal tangente (llamada frecuentemene pushforward) se puede definir para una aplicación diferenciable entre variedades. Dado un vector del espacio tangente
 en un punto, queda definida una aplicación sobre el conjunto de funciones definidas en el entorno de dicho punto, que asigna a cada función (a valores reales) la derivada direccional de la función según el vector :
en un punto, queda definida una aplicación sobre el conjunto de funciones definidas en el entorno de dicho punto, que asigna a cada función (a valores reales) la derivada direccional de la función según el vector :
Teniendo presente la anterior operación de vectores sobre funciones y dada la aplicación diferenciable
se define la aplicación lineal tangente:
Tal que a un vector en p
 le asigna el único vector
le asigna el único vector  que hace que se cumpla que:
que hace que se cumpla que:
Donde:
Una vez definda la aplicación lineal tangente puede definirse la aplicación (diferencial) cotangente (o pullback) sobre 1-formas como:

Tensor métrico
Si la variedad diferenciable tiene estructura de variedad riemanniana o pseudoriemanniana entonces se pueden definir estructuras más complejas y enriquecer el conjunto de herramientas del cálculo tensorial sobre esa variedad. Un tensor métrico g es en esencia un tensor 2-covariante y simétrico definido sobre toda la variedad y no-degenerado:
Derivada covariante
Puede probarse que una variedad riemanniana o pseudoriemanniana
 es localmente isométrica al espacio euclídeo si y sólo si su tensor de curvatura de Riemann se anula. Si la variedad tiene curvatura no nula puede demostrarse que la particularización de las derivadas direccionales de
es localmente isométrica al espacio euclídeo si y sólo si su tensor de curvatura de Riemann se anula. Si la variedad tiene curvatura no nula puede demostrarse que la particularización de las derivadas direccionales de  no tienen las propiedades de invariancia esperadas, en concreto la derivada no covariante de un vector tangente en general no resulta en un vector tangente también a la variedad, y por tanto, no da lugar a un objeto tensorial definible sobre la variedad.
no tienen las propiedades de invariancia esperadas, en concreto la derivada no covariante de un vector tangente en general no resulta en un vector tangente también a la variedad, y por tanto, no da lugar a un objeto tensorial definible sobre la variedad.Para resolver esos problemas se define una conexión que permita relacionar el espacio tangente en puntos diferentes de la variedad (a diferencia del caso euclídeo si la variedad es curva la orientación del espacio tangente, considerado como subconjunto de
, variará de un punto a otro.Derivada de Lie
Derivación exterior
Dada una n-forma (tensor n-covariante totalmente antisimétrico):

La diferenciación exterior
 es una aplicación en el álgebra graduada de n-formas que opera según:
es una aplicación en el álgebra graduada de n-formas que opera según:
De forma que la diferenciación exterior es una combinación lineal de n+1 derivadas parciales de las componentes de la n-forma original. Es interesante notar que la diferenciación exterior generaliza las operaciones de gradiente, rotacional o divergencia, así cuando se considera el cálculo tensorial sobre
 :
:
Donde
 denota el operador dual de Hodge.
denota el operador dual de Hodge.Véase también
- Convenio de sumación de Einstein
- Álgebra multilineal
- Tensor métrico
- uno-forma
- Producto tensorial
- Densidad tensorial
- Curvatura
- Geometría de Riemann
- Tensor de tensiones
- Elasticidad lineal
- Simetrización y antisimetrización
Referencias
Bibliografía
- A. I. Borisenko, I. E. Tarapov (1979), Vector and Tensor Analysis With Applications, Worth Publishers, ISBN 9780486638331
- K. F. Riley, M. P. Hobson, S. J. Bence (2006), Mathematical Methods for Physics and Engineering, Cambridge University Press, ISBN 9780521861533
- Tai L. Chow (2000), Mathematical Methods for Physicists: A Concise Introduction, Cambridge University Press, ISBN 9780521652278
Enlaces externos


















Wikimedia foundation. 2010.